纯视觉感知技术-特斯拉专利揭秘自动驾驶的“三维慧眼”
- 2026-05-13 08:04:05
大家好,我是智链汽车圈主编,定期扫描车企新技术,欢迎交流合作。
专利详细描述了一套创新技术框架,其核心是通过多相机数据+AI模型预测车辆周围空间的立体占用状态:
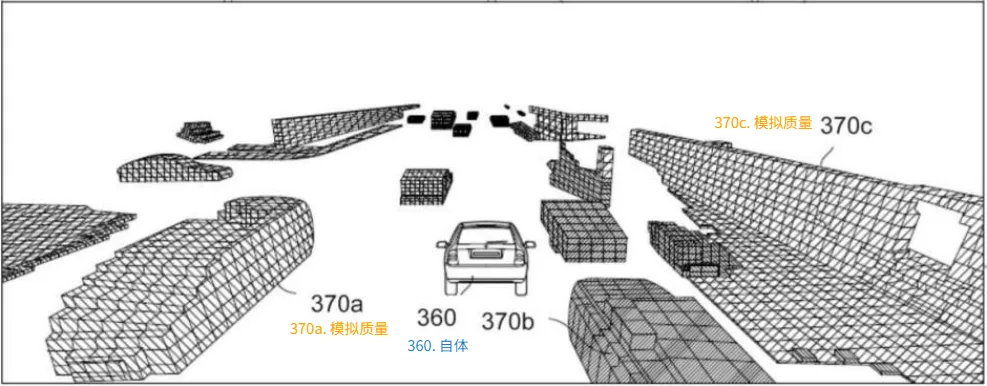
1.体素化空间建模
- 将车辆周围环境划分为微小立方体单元(体素),每个体素代表约33cm³空间。【每个体素可以包括二进制指定0(未占用)或1(已占用)。例如,对象可以是弯曲的。虽然一些体素被完全占用,但其他一些体素可以被部分占用。这些体素可以被划分为更小的体素,使得较小的体素中的一些体素未被占用】。
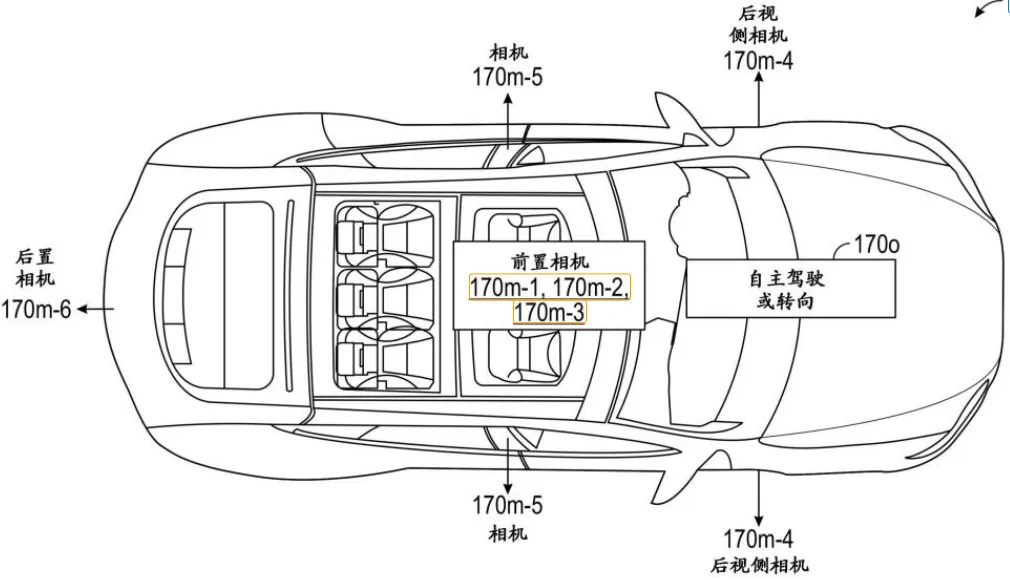
- AI模型通过8个环视相机输入,预测每个体素是否被物体占据(如车辆、行人、路缘)。
2.时空融合算法
- 空间注意力机制:将2D图像特征转换为3D体素空间,通过跨相机视图对齐解决遮挡问题。【每个体素使用3D空间查询,分析服务器可以标识2D特征化图像内与3D表示的特定部分相对应的区域。分析特征化图像内的标识区域,以将多相机图像数据变换为每个体素的3D表示】
- 时序融合模块:时间戳t处的3D空间表示可以与t-1、t-2和t-3处自体的周围环境的3D空间表示融合,连续融合过去4帧数据(t-1至t-3),实现对运动物体的轨迹预判。
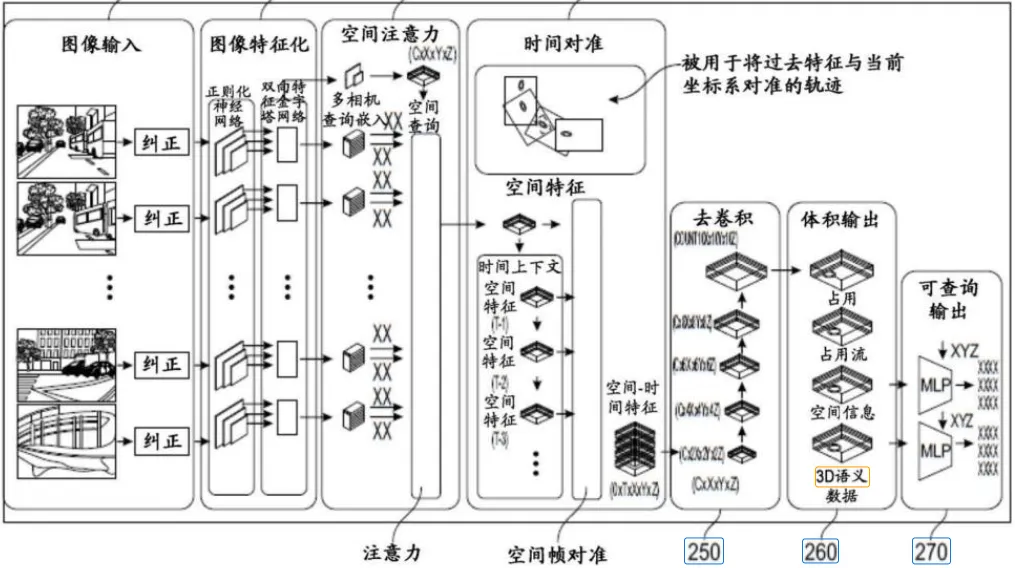
3.亚体素级精细重建
采用三线性插值法突破体素分辨率限制,可识别16cm级精细结构(如路缘弧度)。【如果体素被占用一半,则分析服务器可以定义子体素集,并且使用本文中讨论的方法来标识用于子体素的体积输出。当子体素被聚合(回到原始体素中)时,分析服务器可以确定用于体素的形状。例如,每个体素可以有八个顶点。在一些实施例中,每个顶点可以单独分析并且具有其嵌入。结果,体素的每个顶点内的任何点可以被单独查询。因此,在该“连续分辨率”方法中,分析服务器可以不定义用于子体素的大小】
同步输出占用状态+语义类别+运动矢量,形成完整环境认知。
三、行业影响:三大突破性价值
3.1、硬件成本革命:专利明确强调“无需雷达数据”,仅凭摄像头实现传统方案需激光雷达+毫米波雷达的感知能力。这与特斯拉移除车载雷达的战略直接呼应。
3.2、动态场景理解跃升:通过时空融合算法,系统可识别静态结构(弯曲路缘)、动态障碍物轨迹(如横穿行人)、可通行空间(如车辆间隙)。
3.3、全气候适应性基础:训练数据包含多样本环境,AI模型通过多视图一致性学习克服雨雾干扰,为无高精地图的泛化能力奠基。
四、落地应用:从自动驾驶到人机交互
4.1、自动驾驶决策引擎
生成实时可查询的3D占用网格,直接服务于路径规划算法。
示例:当系统检测到右前方体素群突现“移动占用”属性,可提前触发避让。
4.2、驾驶员可视化系统
在车机屏幕渲染彩色体素地图,用不同颜色标注道路/车辆/行人。
危险区域通过脉冲红光警示,提升人机共驾信任度。
五、未来展望:高精地图的终结者?
地图众包更新:车辆实时生成的占用数据可自动修正地图误差。
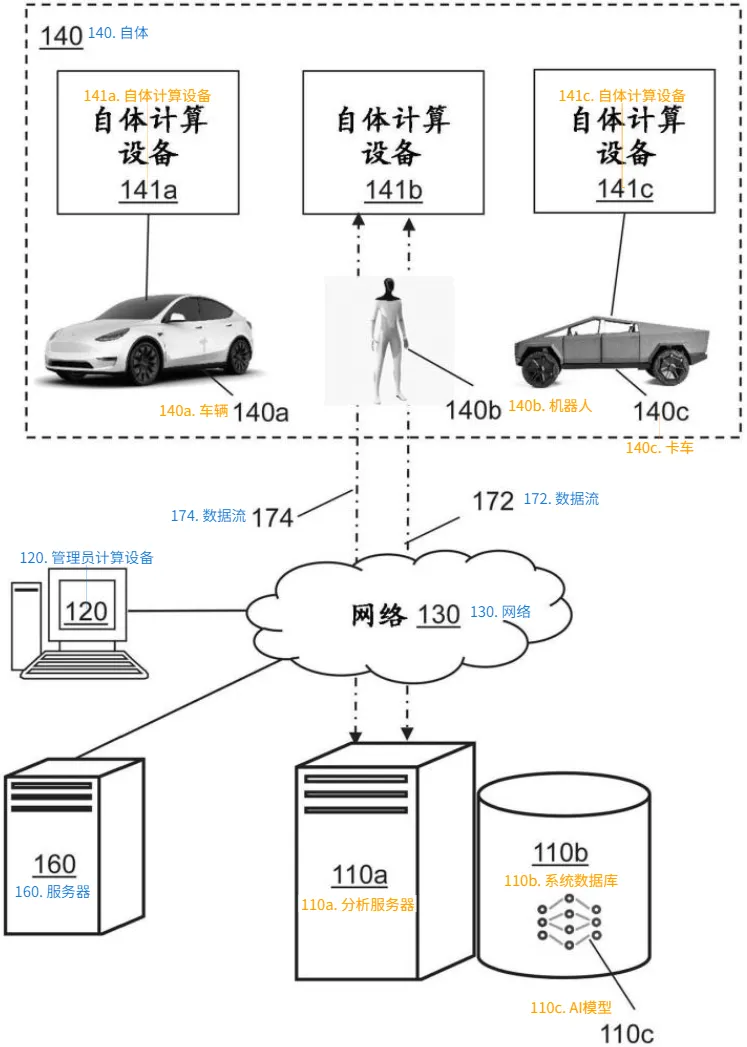
机器人通用视觉:专利明确技术适用于“人形机器人”,提供空间交互能力。
感知算力优化:模型支持剪枝量化,或推动车规芯片设计变革。
思考:特斯拉此举不仅强化了纯视觉路线的技术壁垒,更可能重塑自动驾驶感知标准。
当行业困于多传感器融合的复杂性与成本时,“像人一样看懂世界”的AI视觉模型,正在打开新的可能性大门。欢迎留言探讨!
END
如果你觉得本期分享的内容有帮助,欢迎把文章分享给身边更多的朋友
温馨提示:有问题可咨询主编,微信号:yinghezhilian77

「 往期推荐」
随机文章
-
 10个月宝宝每天需要喝多少奶粉?
10个月宝宝每天需要喝多少奶粉?
- 11万多的SUV竟带自动驾驶?放倒后排就是双人床,这款中国车让老外排队抢!
- 家用SUV段位大洗牌,谁强谁弱一眼分清
- 北京车展5台重磅大型SUV!性能数据拉满,家用豪华全拿捏
- 21.98万拿下全尺寸SUV!零跑D19真成工业奇观了?
- 刚刚!别克至境爆款SUV火了,90分钟狂卖1万台,家庭用户抢疯了!
- 20万大7座SUV杀疯了!中国人拼命买大车,城市交通已经快扛不住了
- 从苹果iCar到奔驰G级,这5款豪华SUV谁更对味
- 轿车VS SUV:到底谁开起来更累?老司机告诉你真相!
- 2026年家用SUV怎么选?我推荐这6款车能满足你的不同需求
- “长续航激光智能SUV” 深蓝S07华为乾崑激光版
