重卡不是放大的小车,货运更需要自己的自动驾驶基座模型.....
- 2026-05-13 09:45:58

点击下方卡片,关注“自动驾驶之心”公众号
编辑 | 自动驾驶之心
>>自动驾驶前沿信息获取→自动驾驶之心知识星球
上周六北京车展现场,自动驾驶之心和卡尔动力研发副总裁王珂、自动驾驶行业资深从业者崔迪潇,坐在卡尔动力运输机器人的货箱里,聊了一场关于 Physical AI 和货运自动驾驶的圆桌。
现场非常硬核,很有赛博朋克的感觉。
一群自动驾驶从业者,不是在会议室里聊 AI,也不是站在展台边讲参数,直接坐进重卡的货箱里,讨论卡车、货运、Physical AI 和自动驾驶下一阶段的技术路线。

车展当天,我们进一步和卡尔动力CEO韦峻青博士探讨了技术上的问题,作为一路关注乘用车自动驾驶技术发展的平台,我们其实没想到卡尔动力在 L4 做出了这么多成绩。
卡尔动力这次在北京车展上分享的内容,整体给我们的感觉是一套面向货运行业的基础设施体系。
在这套体系里,AI 负责学习和决策,Robot 负责承载和执行,Service 负责把车、货、线路、能源、运维和人组织进真实物流网络。
卡尔动力把它总结成三个词,AI、Robot、Service,对应产业级物理 AI 基座模型、运输机器人和网络化运力服务。

这也是我们参加完现场圆桌之后,最强烈的一个感受。
乘用车自动驾驶大模型,解决的是怎么开车。但货运自动驾驶的基座模型,解决的是怎么跑运输。
这两个问题,看起来都在路上开车,但技术底座、数据结构、场景约束和最终价值完全不同,最终也催生出了货运自己的自动驾驶基座模型。
L4 货运走到复制扩展前夜
自动驾驶行业过去很喜欢画曲线,尤其是 L4 货运。
从 2015 年左右开始,行业就在预测 L4 货运什么时候进入增长拐点,什么时候穿越验证期,什么时候迎来真实落地。
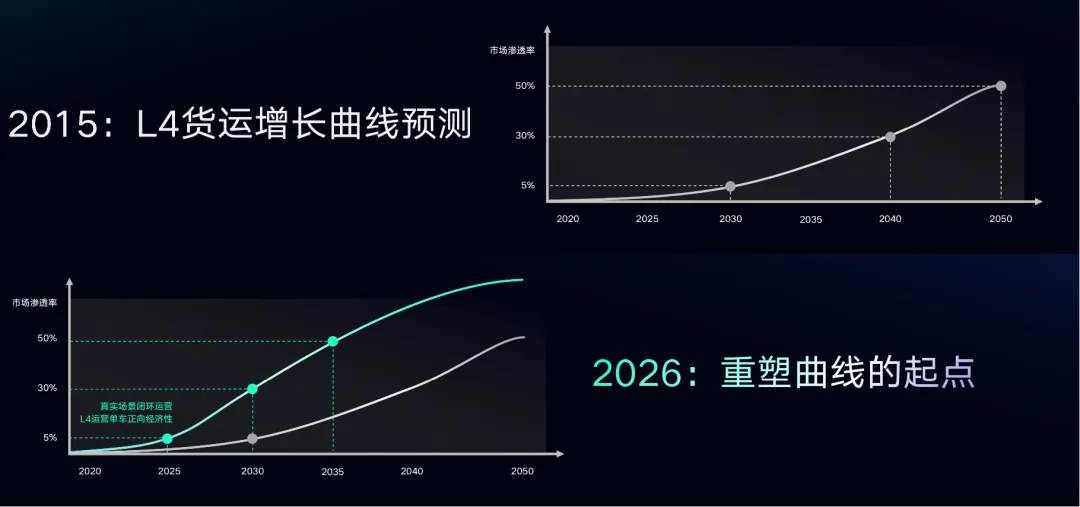
但在货运这个行业,曲线画得再漂亮都不如实际做出来。
卡尔动力在车展现场上给了一个很清晰的时间线,2021 首创编队,2025 落地闭环,2026 复制拓展。
它把 2025 定义为 L4 货运正向落地验证之后,走向复制拓展的关键节点。

在此之前, L4 货运长期卡在两个问题上:一个是技术、另一个是运营成本。
前者考验自动驾驶系统在真实道路、真实天气、真实货运任务里的连续表现;后者考验它能不能在安全基础上,把效率、成本、出勤、能源、调度这些指标全部打通。
在车展现场圆桌,崔迪潇提到,商用车最核心的锚点是客户的 ROI,所有工程目标、算法架构设计和产品设计,最后都要回到客户价值上。

这句话很务实,也很自动驾驶。
和乘用车不同,辅助驾驶好不好用,最终决定权都在车主手上。货运的客户不会因为模型参数更大就买单,也不会因为概念更性感就改造车队。
客户关心的是,这套系统能不能更安全、更稳定、更高效地把货送到。
所以卡尔动力的逻辑很清楚。
2021 年做编队,是找到一个适合货运场景的切入口。
2025 年跑通正向落地验证,证明这套体系能在真实运营里站住。
2026 年讲复制拓展,是想把过去几年在场景、数据、车辆平台和运营服务里的积累,变成一套可以继续铺开的货运基础设施。
这也是 KargoBot Inside 这几个字真正想表达的东西。
重卡不是一辆放大的小车
为什么货运需要自己的自动驾驶基座模型?最直接的原因是,重卡不是一辆放大的小车。
业内谈论自动驾驶时,习惯从乘用车、Robotaxi的经验出发。但到了重卡,很多问题会变得完全不同。
圆桌上,王珂讲了一个很形象的例子,内轮差。
车头扫过的区域,和后面挂箱扫过的区域并不一样。如果 AI 开车只顾车头,不顾挂箱,车头过去了,后面十几米长的挂车可能会扫到电线杆、行人或者停在旁边的电动车。卡尔动力在传感器布置上,会让传感器模组稍微突出于车头,先在物理上保证该看到的位置能看到,再通过感知和规划覆盖内轮差区域。

这件事听起来像工程细节,但其实指向了重卡自动驾驶的底层差异。
乘用车是一个单刚体,重卡是车头加挂箱,本质是多刚体系统。
它转弯、刹车、变道、会车时,车身每一部分扫过的空间都要被理解。
如果再考虑满载 49 吨、货物重心、挂车姿态、横风影响、低附着路面,整个问题就更加复杂。崔迪潇在圆桌里提到,挂箱载重范围和质心分布会影响车辆动力学和控制,有横风时,长挂箱还会形成很大的侧向力。
王珂现场开了句玩笑,树大招风,车大也招风。
这句话在玩笑间,就把重卡自动驾驶必须面对的真实物理世界展示了出来。
超长制动距离也是一样。
乘用车几十米可以刹住,重卡在高速、满载、低附着等场景下,需要更远的感知范围和更早的决策。更关键的是,它不能简单粗暴地重刹,因为后面的挂箱可能会推动车头,形成更危险的状态。王珂提到,重卡需要比乘用车、Robotaxi 和 ADAS 更早做高层决策,也需要长期打磨超长距离视觉感知能力。
这就是货运自动驾驶和乘用车自动驾驶最核心的差异。
乘用车自动驾驶,很多时候是在解决「怎么开得像人」。
重卡自动驾驶,需要在几十吨的物理惯性里,提前理解风险。
而且货运场景里的长尾,也和城市出行很不一样。王珂讲了几个大家平时不太有体感的场景。
风力发电机扇叶、桥梁预制构件、超宽超长工业制成品、秋收季节上路的联合收割机,甚至还有羊群。这些东西对 Robotaxi 来说,可能是很罕见的 corner case。但对干线货运来说,它们可能就是某个季节、某条线路、某个行业的日常。
这也是为什么,通用自动驾驶模型很难直接解决货运问题。
货运需要的不是一套泛泛而谈的道路智能,而是一套真正理解重卡、理解干线、理解运输任务的模型能力。
03
Truck Driver Foundation Model,
货运自己的 AI 司机
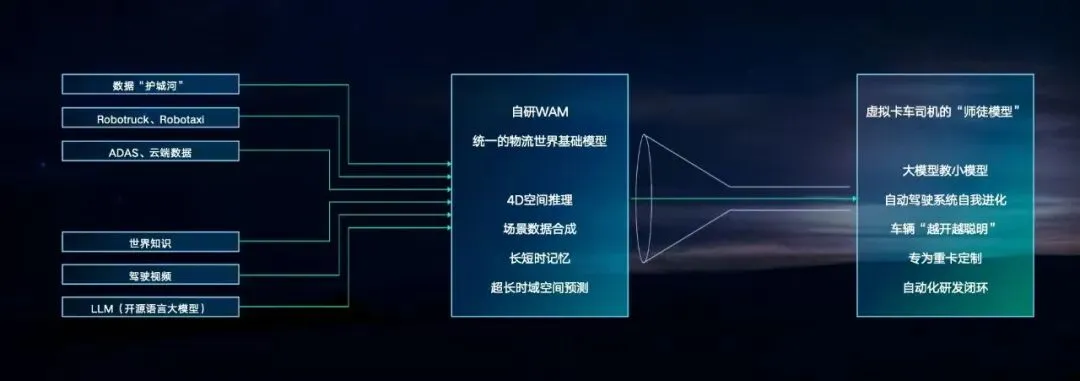
针对货运自动驾驶所面临的种种问题,卡尔动力提出的 Truck Driver Foundation Model,就很值得分析。如下图所示,有几个关键点提炼给大家:
输入端值得关注的是世界知识、驾驶视频和LLM;
经由自研的世界行为模型WAM进行特征编码,实现对场景的4D空间推理、数据合成,并且具备长短时记忆和超长时域的空间预测能力;
最后经由师徒模型进行蒸馏,实现自动驾驶系统的持续进化。
在乘用车领域,4D空间推理、长短时记忆均已较为成熟,但超长时域的空间预测能力却是重卡领域所必须的,这个方向其实没有太多的经验参考。
尤其是高速上,重卡想要感知远处200m甚至500m外的障碍物,现有激光雷达和视觉感知技术,基本无法满足重卡全工况下的高可靠安全需求,所以卡尔动力在这个领域的探索,我相信是有自己的理解。
整体上看,卡尔动力采用强化学习 + 自研 WAM 的技术范式,构建 Kargo Truck Driver Foundation Model,也就是货运基座模型。
面向重卡自动驾驶任务,对多场景数据和通用自动驾驶能力做专项优化,形成面向重卡的世界行为模型。
这个名字很有意思。它没有叫通用驾驶模型,而是叫 Truck Driver Foundation Model,货运自己的 AI 司机。
这里面最关键的是两个技术。一个是 WAM,世界行为模型;另一个是强化学习。
WAM 让卡车理解物理世界如何演变,强化学习让卡车知道自己该怎么做。
对重卡来说,预测未来比看清现在更重要。
因为重卡的动作响应慢,制动距离长,车身结构复杂,货物和挂箱还会带来额外动力学约束。它不能等风险已经快到眼前再处理,而是要在更长的时序里提前预测,前方道路会怎么变化,旁边车辆会怎么博弈,挂车会扫过哪里,低附着路面下车身会不会进入危险状态。
这也是卡尔动力 WAM 里强调 4D 空间推理、场景数据合成、长短时记忆和超长时域空间预测的原因。
再看强化学习。
过去很多端到端自动驾驶模型,本质上还是以模仿学习为主。模型学习人类司机在某个场景下怎么开,然后在相似场景里复现这种行为。
这条路当然有效。但货运的难点在于,很多场景甚至没有人类经验供参考。
例如卡尔动力采用的编队模式,车辆编队的最小车间距是10m,人类司机无法接受这么小的车间距。不止如此,重卡模仿学习还会面临乘用车完全不一样的问题:
一方面,长尾风险太多,靠示范数据很难覆盖完。
另一方面,重卡是强约束系统,安全、效率、能耗、时效、货损、编队协同都要一起优化。人类司机的一条轨迹,只告诉模型「当时这样开了」,不一定告诉模型「这是不是更优」。
强化学习的价值就在这里。
卡尔动力的强化学习,在已有驾驶经验的基础上,把目标、奖励和约束放进训练过程,让模型不只是学会像司机一样开,而是在货运任务里学会更优的动作选择。
强化学习和 WAM 的组合,本质上是在把「驾驶经验」升级成「货运策略」。WAM 提供对世界变化的理解,强化学习提供在复杂约束下的决策优化,这比单纯做一个更大的端到端模型更适合货运。
不止如此,卡尔动力提到的师徒模型,也很值得琢磨。
云端离线教师模型依托海量跨域数据训练,边缘学生模型经过蒸馏轻量化部署。再结合接管事件诊断、长尾场景挖掘和自动化研发闭环,把模型迭代周期从 5 天压缩到 12 小时。
货运基座模型不能只在云端聪明它必须能部署到车端,能实时响应,能持续迭代,还要能在真实运营反馈里不断变强。
所以师徒模型的意义,不只是大模型教小模型。它是把云端训练、车端部署、运营反馈和长尾挖掘接成闭环。一台车跑过的经验,最后要变成整个系统的能力。
这才是「车辆越开越聪明」背后的工程含义。
04
数据不是数字,是货运经验
讲基座模型,最后一定要回到数据,卡尔动力目前披露的几组很抓眼。
4500 万公里落地里程,14 亿吨公里运量,超 400 台编队,超 300 天 AI 司机和人类司机一起接活。

这些数字是卡尔动力背后真实的任务数据,如果只是普通道路数据,哪怕数量再大,也未必能训练出懂货运的模型。
据我们了解,卡尔动力的多源训练数据覆盖 Robotaxi、Robotruck和乘用车的量产数据,为模型训练和泛化提供支撑。
这个组合很有价值。
Robotaxi 和乘用车 NOA 数据,可以提供更丰富的通用交通场景;
Robotruck 数据,则提供重卡和干线的核心经验;
云端合成数据,能够把稀缺长尾场景补出来。
但真正构成壁垒的,还是那些来自货运本身的真实运营数据。因为它不只是告诉模型路上有什么,还告诉模型货运是怎么运行的。
这也是货运基座模型和通用自动驾驶模型最大的差别。通用模型学的是道路,货运模型还要学线路、货物、车队、能源、时效和成本。
对 Robotaxi 来说罕见的 corner case,在货运里可能就是某个季节、某条线路、某个行业的日常。这种日常,只有真实跑过才能沉淀进模型。
05
安全决定 L4 下限,
效率决定 L4 上限
在乘用车自动驾驶走向成熟的阶段,货运自动驾驶反而在茁壮成长。AI 要真正进入运输系统,就必须长在适合货运的身体里,也必须接入真实的运力网络。
卡尔动力提到的 KargoPlatform Gen5.0硬件平台、全冗余、全线控、运输机器人,其实解决的是模型落地的物理底座问题;而调度、能源、运维、驾驶员赋能和虚拟驾驶员服务,解决的是它如何持续进入真实物流网络的问题。
这也是为什么卡尔动力把自己的体系拆成 AI、Robot、Service 三层。
AI 决定虚拟卡车司机能不能持续进化,Robot 决定这套智能能不能安全执行,Service 决定它能不能被客户真正使用起来。
对 L4 货运来说,安全决定下限,效率决定上限。
如果说过去行业更关注「车能不能自己开」,那么现在卡尔动力正在回答另一个更难的问题:一套自动驾驶货运系统,能不能安全、稳定、高效地跑进真实产业链里。
这可能才是货运自动驾驶走向复制拓展的关键。

自动驾驶之心

求点赞
求分享
求喜欢
随机文章
-
 10个月宝宝每天需要喝多少奶粉?
10个月宝宝每天需要喝多少奶粉?
- 自动驾驶汽车在不可避免的碰撞中,究竟应优先保护车主还是追求全局伤亡最小化牺牲车主?
- 17.98万起开启中大型轿车闪充新时代,汉EV闪充版无对手碾压全场
- 车展价格战杀疯了!20万级SUV/轿车,谁是真良心谁是韭菜
- 深圳到通辽轿车托运 深圳到通辽物流专线 通辽到深圳轿车托运
- 奇瑞路虎打造的全新品牌,神行者首款SUV官图,大6座,下半年上市
- 上汽奥迪E7X全球首秀,官宣L3级自动驾驶量产落地,定义豪华电动智驾新范式
- 方程豹摊牌了,轿车和超跑一起上,它到底想干啥?
- 【永达风行】这辆十万级轿车,开进了我的心坎里
- 全新奥迪A6L,满足你对豪华C级轿车的全部想象
- 全球尺寸最大的十辆轿车:5米99幻影都只能排第二,红旗H9是唯一国产上榜
