当法规都在用TTC评估自动驾驶避撞风险,但TTC可能不是最佳选择
- 2026-05-13 14:44:43
2026年,清华大学车辆与运载学院联合中南大学、MIT SMART、长安大学等机构,在arXiv联合发表了一篇论文,提出了一种全新的风险量化方法——Evasive Acceleration(EA,规避加速度)。为什么学者们试图用一种新的方法代替现行的TTC,让我们先做一道选择题:
两个场景,TTC都显示2.0秒。
场景A:一辆车直冲你而来,左右两侧全是实线,避无可避,只能全力制动
场景B:一辆车从侧向斜插过来,左右两侧各有两米空余,一个轻打方向就能躲开
按TTC的逻辑,这两个场景风险等级一样。该不该刹车、刹多狠,系统的判断依据是同一套。
但稍有驾驶经验的人都知道:这两个场景,根本不是一回事。
这就是TTC作为风险量化指标的根本性缺陷——而这个问题,正在被悄悄写进你车上那颗AEB芯片的算法里,也写进了全球主要AEBS强制标准的技术文档里。
ADAS很重要,AEBS是最后那道保险
先说清楚一件事:为什么我们要关心AEBS用什么指标来判断风险。
高级驾驶辅助系统(ADAS)正在快速普及,而AEBS(Advanced Emergency Braking System,自动紧急制动系统)是整个安全体系的最后一道防线——当前方突然出现障碍物,驾驶员没有及时反应时,AEBS自动介入,避免或减轻碰撞。
这道保险的逻辑链条很清晰:感知 → 碰撞判断 → 决定是否制动。
其中"碰撞判断"是核心:系统需要实时回答"按现在的趋势,会不会撞?有多紧急?"
这个问题的答案,全球几乎所有AEBS系统,都依赖同一个指标——TTC(Time-to-Collision,碰撞时间)。
现行AEBS设计和法规,都以TTC为核心
TTC是什么?公式很简单:
TTC = t
t满足:

两辆车按当前趋势行驶,按这个速度下去,还有多少秒会碰撞。这个数字越小,意味着碰撞越紧迫,系统越需要赶紧刹车。
目前全球主要AEBS强制标准,都以TTC为核心制定触发逻辑:
UN R152(欧盟) 要求AEBS在TTC低于某阈值时(通常1.6~2.5秒)发出碰撞预警;紧急制动在TTC继续下降时激活;允许碰撞速度表,本质上是TTC在不同车速下的分档指标。
GB 39901—2025(中国) 与UN R152类似,以TTC为主要判据,结合减速度、碰撞速度构成完整性能评价体系。值得注意的是,中国将M1类车对车工作范围扩展到了80km/h——比UN R152的60km/h更高。
EuroNCAP、NHTSA等 评测体系,同样以TTC为核心定义测试场景的难度等级和通过标准。
此外,nuPlan、NAVSIM等当前最主流的自动驾驶测试平台,也都依赖TTC评估系统安全性。TTC影响了数据整理、模型训练的全流程。
一句话:TTC不只是AEBS的一个参数,它在过去十年里从根本上塑造了整个行业对"什么是驾驶风险"的理解。
TTC范式的两个根本性缺陷
然而,这套运行了十几年的体系,存在两个深层问题。
缺陷一:维度失配——把二维问题压缩成一维
避撞,本质上是一个二维问题。
当两辆车面临碰撞风险时,驾驶员在综合评估风险后可以在任意方向上施加规避动作——纵向制动、横向转向,或者两者组合。任意一个方向都可能成为最优解。
但TTC是一个一维标量:它只告诉你"还有多久碰撞",不告诉你"向哪个方向规避最容易、成本最低"。
结果:维度被强行压缩,规避难度和潜在风险差异极大的场景,TTC可能给出几乎相同的值。
这就是为什么开篇那道选择题里,场景A和场景B的TTC可能都是2.0秒——但A需要全力制动,B只需要轻轻一打方向。
AEBS工程师对这个问题不会陌生:这正是"误响应"(false reaction)产生的根源之一——系统把"看起来紧迫但实际上有大量规避空间"的场景,当成了"必须全力制动"的危险场景。
缺陷二:风险-时间错位——峰值出现在最不该出现的时候
TTC描述的是"时间紧迫性",而不是"实际风险"。
一个最典型的错位场景:当两车正在成功规避的过程中,TTC仍在下降,显示"越来越危险"。直到驾驶员完成了规避动作、冲突解除,TTC才突然跳变到无穷大,显示"安全"。
换句话说:TTC的峰值,可能出现在风险最低的那一刻。
而当TTC=2.5秒触发碰撞预警后,驾驶员一个轻微转向就解决了问题,但TTC急剧下降的过程可能给系统造成误导——让它以为风险仍然极高,从而做出了不符合实际需求的制动决策。
对AEBS来说,这带来的结果是:
该预警的时候没预警
冲突已经解除后,因为系统在重新计算风险时的延迟,反而触发了误制动
清华等学者提出了EA:更贴近真实风险的新范式
2026年,清华大学的研究者联合中南大学、MIT SMART、长安大学等机构,提出了一种全新的风险量化方法——Evasive Acceleration(EA,规避加速度)。
EA评估所有可能的相对碰撞规避方向及该方向所需要的相对加速度,并选择保留最小的那个。其核心思想是:与其问"还有多久碰撞",不如问"要躲开这场碰撞,最少需要多大的劲儿"。
具体来说:EA把风险定义为——在不改变当前行驶趋势的前提下,使两车交互变为无碰撞状态,所需要的最小恒定相对加速度的模长。
用更直白的话说:
"这场景有多危险?" → "就算选最优的那个方向来规避,要躲开这事儿,至少得付出多大的劲儿?"
EA值 | 含义 |
|---|---|
EA = 0 | 不需要任何额外加速度,当前轨迹就能避开碰撞 → 低风险 |
EA 较大 | 需要使用更强的规避动作,才能躲开 → 高风险 |
EA的关键特性:
二维的:同时考虑纵向和横向相对运动,不丢失方向信息
无超参数:不需要人工设定触发阈值,EA的量级本身就能说明问题
物理可解释:单位是 m/s²,直接告诉系统"需要多大劲儿",对工程师非常友好
计算高效:平均单帧5毫秒,已具备实时大规模部署条件
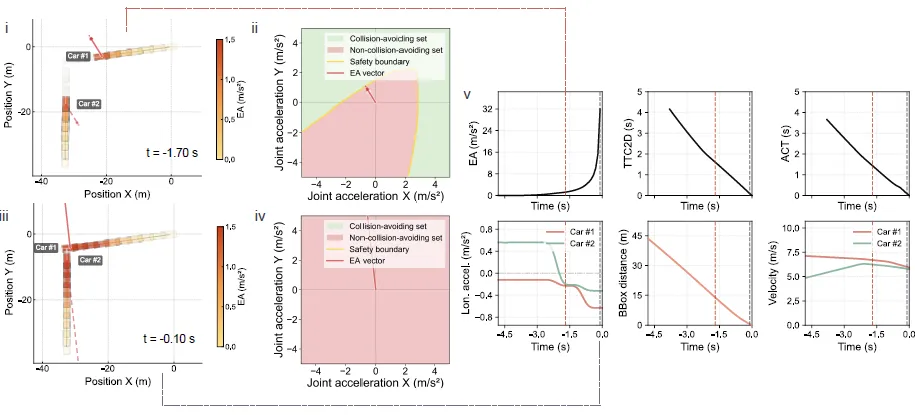
研究人员用一个真实的案例说明了EA的价值所在:#1和#2车辆准备在交叉路口并线,最终在-0.10s时刻发生碰撞。
在研究过程,研究者在任意时刻绘制了二维联合加速度空间图,展示避撞与非避撞的决策集合,然后在时间轴上绘制EA的连续曲线,然后和TTC-时间曲线进行对比。整个事故过程中EA值呈急剧加速的非线性上升趋势,而TTC的方法呈现出近似线性的下降趋势。这表明EA可以反映为避免碰撞所需的剩余干预力度。而基于TTC的方法可能会高估那些仅需极小避让力度的良性交互的风险。
三个实验,EA全面优于TTC
研究团队在5个开源自然驾驶数据集(共44,180个潜在冲突案例,来自德国、中国、美国)和658个真实重构碰撞案例上,对EA进行了三轮验证。
实验一:EA最能区分"要撞的"和"不会撞的"
在四个不同时间窗口(从碰撞前0.5秒到2.0秒),测试各方法区分碰撞案例与非碰撞交互的能力:
指标 | EA | 次优基线(TTC2D) | 提升 |
|---|---|---|---|
AUPRC(碰撞前1.5s窗口) | 0.901 | 0.812 | +11% |
AUROC(碰撞前1.5s窗口) | 0.934 | 0.865 | +8% |
1%误报率下召回率 | 0.759 | 0.482 | +57% |
关键发现:越早的时间窗口,EA的优势越明显。 这意味着EA能在更早阶段就区分出真正危险的场景,而TTC已经开始给出模糊甚至误导性的信号。
实验二:EA预警最早,误报更少
在等误报约束(相同假阳性率)下,EA在所有阈值下都给出最早的持续有效预警:
阈值 | EA预警提前量 | 相比TTC | 相比ACT |
|---|---|---|---|
P99.5(最严格误报约束) | -1.10秒 | +267% | +175% |
在车-行人场景中,EA的优势尤为显著:TTC经常对"良性近距离接近"(如行人站在路边等红灯)给出很小的TTC值,导致阈值偏保守,无法在真正危险时提前预警。EA能正确区分这类场景。
实验三:EA包含了TTC几乎所有有用信息,TTC却没有EA的信息
这是论文最有力的一项结论:
EA相比所有基线的信息保留量提升 54.2%~241.4%
增量信息不对称比达到17.5~95.5倍
具体含义是:把EA加入TTC的分析框架,能额外获得12.4%~38.4%的信息增益;但把TTC加入EA,几乎没有额外增益。
翻译成大家容易理解的话:TTC里所有有用的东西,EA几乎都有;但EA里有的大量非冗余额外信息,TTC完全没有。EA不是在TTC基础上的小修小补,而是一个更完整的风险度量体系。
对AEBS工程师来说,这意味着什么
短期:法规不会变,但工程层面有直接价值。
GB 39901新增了5个本土化误响应场景——跟车目标右转、相邻车道静止车辆、车道内铁板、同向运动成年行人、对向静止自行车。这是中国城市交通密度下的真实工程需求,也是工程师最头疼的地方。
EA能精准区分"看似紧迫但两侧有大量空间"和"真的很难规避"。以EA为底层风险度量,有望设计出更精准的触发逻辑,从根本上减少误响应的同时保持真阳性率——这是工程师真正需要解决的问题。工程师如果运用EA不得不解决一个棘手的难题 - 提高感知检测的准确率。常规的TTC策略会确保车辆不会突然改变方向,让其他道路使用者无法预料,更不会做出违反交通规则的行为,比如压实线变道。因此,在运用EA策略时就要求感知系统能够持续、准确地识别出车辆周围的所有交通参与者,尤其是行人,特别是儿童。
长期:EA可能成为下一代标准的理论基础。
法规修订影响范围大,可以考虑将“EA加入TTC的分析框架”作为推荐方法, 在保留现有测试场景的同时,增加部分更复杂的场景——比如EA=0.5m/s²对应"容易规避",EA>2.0m/s²对应"高难度场景",这将比仅用固定TTC的测试场景设计更符合真实驾驶的物理本质。
一句话总结
ADAS很重要,AEBS是最后那道保险,而现行AEBS的策略设计和法规测试都依赖TTC——但TTC将二维避撞问题压缩成一维,有限风险信息性和风险-时间错位这两个根本缺陷,使它无法忠实捕捉真实风险。清华大学等机构提出的EA,换了一种问法:"最优方向规避需要多大劲儿"而非"还有多久碰撞",从学术角度证明了风险量化可以更准确。这为下一代AEB算法设计和安全标准修订,提供了一个值得重视的理论基础。
你的AEB项目用的是什么风险度量方法?EA对你的工程师团队有参考价值吗?欢迎留言区交流。
随机文章
-
 10个月宝宝每天需要喝多少奶粉?
10个月宝宝每天需要喝多少奶粉?
- 混动SUV&方盒子之王再出王炸,方程豹钛7 EV闪充版售价19.98万元起
- 万信物流 - 广州到青岛轿车托运 - 广州到青岛物流公司 - 青岛到广州汽车托运
- 一汽是真急了!红旗全新SUV亮相车展,配零跑三电,只差价格落地了
- 被称为“顶级安全之选” 的一款韩国SUV,竟然两次刹车失灵! 而且同款车已致儿童惨死,现在大规模召回!
- 8万预算买燃油SUV,别只图便宜,这3台更适合家用
- 40万预算看豪华SUV,全新宝马X3香是真香,但别急着先下单
- 追觅硅谷炸场:当自动驾驶之父与图灵奖得主同时出现
- 30万想买一台“有排面”的SUV?我会把奔驰GLB摆上桌
- 路虎推出全新旗舰SUV——揽胜SV Ultra,路虎史上最豪华、最先进、最尊贵的车型,使用了革命性的汽车音响技术、专属精奢的内外设计;
- 深圳到晋城轿车托运 深圳到晋城物流公司 晋城到深圳汽车托运
