在自动驾驶技术快速迭代的今天,定位系统的精度与可靠性是自动驾驶功能安全的 "生命线"。
作为融合定位系统的 "心脏",惯性测量单元(IMU)在卫星信号丢失的隧道、城市峡谷、高架桥下等场景中,承担着唯一连续定位的重任。
然而,长期以来,车载 IMU 行业缺乏统一的国家标准,各企业技术指标混乱、试验方法各异,导致产品质量参差不齐,给主机厂选型集成和行业监管带来了极大挑战。
近日,由工业和信息化部提出、全国汽车标准化技术委员会归口的《车载定位系统技术要求及试验方法 第 2 部分:惯性测量单元》国家标准(征求意见稿)正式发布。
这是我国首个专门针对车载 IMU 的强制性技术标准,由南京航空航天大学、中汽中心牵头,联合导远电子、比亚迪、长安、博世、高通等 30 余家产业链头部企业共同起草。
标志着车载 IMU 行业正式进入标准化、规范化发展的新时代。
本文将为汽车技术工程人员深度解读这份重磅标准的核心内容,全面解析自动驾驶 IMU 的技术门槛、试验方法和行业影响。
一、标准概况:覆盖全产业链的权威规范
本标准是《车载定位系统技术要求及试验方法》系列标准的第 2 部分,该系列标准构建了车载定位系统完整的标准体系:
第 1 部分:卫星定位
第 2 部分:惯性测量单元
第 3 部分:融合系统
1.1 起草单位阵容空前强大
本标准的起草单位涵盖了车载 IMU 产业链的各个环节,确保了标准的科学性、先进性和实用性:
高校科研机构:南京航空航天大学、吉林大学、九江精密测试技术研究所
核心供应商:导远电子、华创晨晶、诚芯智联、博世、法雷奥、高通
整车企业:长安、比亚迪、一汽、上汽通用五菱、北汽福田、赛力斯、厦门金龙
检测机构:中汽中心、上海汽检、中国汽研、襄阳达安
生态企业:千寻位置、罗德与施瓦茨、司南导航
1.2 适用范围明确
本标准适用于包含 3 轴加速度计和 3 轴陀螺仪的车载 IMU,其他类型的惯性测量单元可参照执行。
标准特别区分了两类应用场景:
这一区分充分考虑了不同应用场景对 IMU 性能的差异化需求,既保证了自动驾驶的安全底线,又兼顾了其他场景的灵活性。
二、核心技术要求详解:定义自动驾驶 IMU 的硬指标
本标准从输出要求、性能要求和环境要求三个维度对车载 IMU 提出了全面的技术规范。
其中性能要求是核心,直接决定了 IMU 的定位精度和可靠性。
2.1 基础输出要求
按照标准规定,车载 IMU 的输出必须包含:
对于应用于驾驶自动化系统的 IMU,输出更新率不得低于 100Hz。
这一要求确保了 IMU 能够实时捕捉车辆的动态变化,为自动驾驶系统提供毫秒级的运动状态反馈。
2.2 核心性能指标:9 项指标全面考核
标准对陀螺仪和加速度计分别规定了 9 项核心性能指标,这些指标是衡量 IMU 性能的"金标准"。
2.2.1 陀螺仪性能要求
陀螺仪用于测量车辆的角运动,其性能直接影响姿态角的测量精度。
标准对自动驾驶用 IMU 的陀螺仪提出了严格要求:
性能指标 | 要求值 | 单位 |
零偏 | ≤0.2 | °/s |
零偏稳定性 | ≤10 | °/h |
零偏不稳定性 | ≤4 | °/h |
角度随机游走 | ≤0.35 | °/√h |
全温零偏稳定性 | ≤0.1 | °/s |
标度因数非线性度 | ≤2×10⁻⁴ | - |
全温标度因数误差 | ≤3‰ | - |
交叉耦合 | ≤0.05 | ° |
带宽 | ≥80 | Hz |
关键指标深度解读:
零偏稳定性:衡量陀螺仪长期稳定性的核心指标。10°/h 的要求意味着在无外部修正的情况下,陀螺仪每小时的角度误差不超过 10 度,能够满足隧道内 30 秒以上的高精度定位需求。
角度随机游走:反映陀螺仪的短期噪声水平。0.35°/h 的要求确保了 IMU 在短时间内的角度测量精度,避免了定位结果的剧烈波动。
全温性能:标准对全温零偏稳定性和全温标度因数误差的严格要求,是因为车载 IMU 需要在 -40℃~85℃的极端温度范围内工作,温度变化会对 MEMS 器件的性能产生显著影响。
带宽:80Hz 的带宽要求确保了 IMU 能够准确测量车辆的高频动态运动,如急加速、急刹车、急转弯等场景下的姿态变化。
2.2.2 加速度计性能要求
加速度计用于测量车辆的线加速度,其性能直接影响速度和位置的测量精度。
标准对加速度计的要求如下:
性能指标 | 要求值 | 单位 |
零偏 | ≤5 | mg |
零偏稳定性 | ≤0.1 | mg |
零偏不稳定性 | ≤50 | μg |
速度随机游走 | ≤0.04 | m/s/√h |
全温零偏稳定性 | ≤3 | mg |
标度因数非线性度 | ≤3×10⁻⁴ | - |
全温标度因数误差 | ≤3‰ | - |
交叉耦合 | ≤0.05 | ° |
关键指标深度解读:
零偏稳定性:0.1mg 的零偏稳定性意味着在无外部修正的情况下,加速度计每小时的速度误差不超过 0.36m/s,这是保证长时间定位精度的基础。
速度随机游走:反映加速度计的短期噪声水平。0.04m/s/h 的要求确保了 IMU 在短时间内的速度测量精度。
交叉耦合:0.05° 的交叉耦合要求确保了 IMU 各轴之间的独立性,避免了一个轴的运动对其他轴测量结果的干扰。
2.3 环境要求:适应汽车复杂工况
车载 IMU 工作在极其复杂的汽车环境中,需要承受各种恶劣条件的考验。
标准从 6 个方面对 IMU 的环境适应性提出了全面要求。
2.3.1 电气性能
标准规定了车载 IMU 的直流供电电压范围,符合汽车电气系统的标准规范:
标称电压 | 最小电压 | 最大电压 |
12V | 9V | 16V |
24V | 16V | 32V |
此外,标准还对过电压、叠加交流电压、供电电压瞬态变化、反向电压、短路保护等 10 项电气性能提出了明确要求。
确保 IMU 能够在汽车电源电压波动的情况下稳定工作。
2.3.2 电磁兼容
汽车内部是一个复杂的电磁环境,IMU 必须具备良好的电磁兼容性能。
标准要求:
试验脉冲 | 抗扰试验等级 | 试验要求 |
1 | III | 试验后,车载 IMU 输出量应满足性能要求 |
2a | III | 试验中,车载 IMU 数据应满足功能要求;试验后,车载 IMU 输出量应满足性能要求 |
2b | III | 试验后,车载 IMU 输出量应满足性能要求 |
3a/3b | III | 试验中,车载 IMU 数据应满足功能要求;试验后,车载 IMU 输出量应满足性能要求 |
2.3.3 环境耐候性
标准对车载 IMU 的温湿度范围提出了严格要求,根据安装位置的不同分为两类:
汽车上安装位置 | 贮存环境温度 (℃) | 工作环境温度 (℃) | 工作环境相对湿度 (%) |
无特殊要求 | -40 ~ 90 | -40 ~ 85 | 25 ~ 75 |
乘客舱内太阳直射处及车顶 | -40 ~ 95 | -40 ~ 90 | - |
在防尘防水方面,标准要求:
IP6K9K 是目前最高等级的防尘防水标准,能够承受 80℃高温、80-100bar 高压水流的冲洗,适用于安装在车外的 IMU 产品。
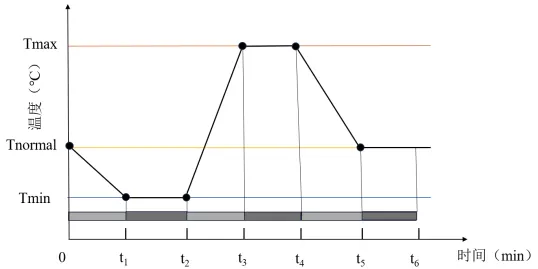
标准中还给出了全温静态测试的温度循环曲线,这是测试 IMU 全温性能的关键:
温度循环方式为:参考点温度 (23℃±5℃)→最低工作温度→最高工作温度→参考点温度。
各温变阶段的温度变化速率不小于 1℃/min,每个温度点的维持时间不低于 1 小时,温度循环次数不小于 3 次。
三、关键试验方法解析:确保性能可验证、可重复
本标准不仅规定了技术要求,还详细规定了相应的试验方法和数据处理方法。
确保各项指标能够被准确、可重复地验证。
3.1 性能试验方法
标准规定了 6 项核心性能试验,覆盖了所有静态和动态性能指标:
常温静态测试:将 IMU 固定在隔振静止平台上,预热 5 秒后记录至少 4 小时的输出数据,用于计算零偏、零偏稳定性、零偏不稳定性和随机游走。
常温多位置测试:将 IMU 固定在转台上,在 0°~359° 范围内选择 24 个测试点进行测试,用于计算加速度计的零偏、标度因数非线性度和交叉耦合。
常温多速率测试:将 IMU 固定在转台上,以 ±1°/s 至 ±200°/s 的不同角速率进行测试,用于计算陀螺仪的标度因数非线性度和交叉耦合。
全温静态测试:将 IMU 置于温箱中,按照温度循环曲线进行测试,用于计算全温零偏稳定性。
全温动态测试:将 IMU 置于温箱转台中,在 - 40℃~85℃范围内均匀选取 7 个温度点进行测试,用于计算全温标度因数误差。
陀螺仪带宽测试:将 IMU 固定在角振动台上,以 1Hz 至 120Hz 的不同频率进行振动测试,用于计算陀螺仪的带宽。
标准特别规定了使用Allan 方差法计算零偏不稳定性和随机游走,使用最小二乘法计算标度因数。
这些数据处理方法的统一,确保了不同实验室测试结果的可比性。
3.2 环境试验方法
标准规定了 6 大类环境试验,全面考核 IMU 在各种恶劣环境下的可靠性:
电气性能试验:10 项试验,考核 IMU 的电源适应性
电磁兼容试验:4 项试验,考核 IMU 的电磁抗扰性和发射特性
机械性能试验:3 项试验,考核 IMU 的抗振动、抗冲击和抗跌落能力
环境耐候性试验:11 项试验,考核 IMU 的温湿度适应性和防护性能
化学负荷试验:考核 IMU 对汽车常用化学试剂的耐受性
耐久性试验:可选试验,考核 IMU 的长期使用寿命
对于耐久性试验,标准给出了基于Arrhenius 模型的高温耐久性试验计算方法。
以安装在乘客舱内太阳直射处的 IMU 为例,按照 6000 小时的设计寿命计算,高温耐久试验的持续时间约为1156 小时。
这一科学的计算方法为企业制定耐久性试验方案提供了依据。
四、对行业的深远影响:推动车载 IMU 产业升级
本标准的发布将对我国车载 IMU 行业产生革命性的影响,主要体现在以下四个方面:
4.1 统一技术门槛,淘汰落后产能
标准明确了自动驾驶用 IMU 的最低技术要求,将一批技术水平低、产品质量差的企业淘汰出局。
促进行业资源向头部企业集中,提升整个行业的技术水平和产品质量。
4.2 降低主机厂选型成本
统一的国家标准为主机厂提供了客观、公正的产品评价依据。
主机厂可以根据标准要求对供应商的产品进行统一测试和评估,大大降低了选型和集成的难度,减少了重复测试的成本。
4.3 促进技术创新,加速国产替代
标准规定的技术要求代表了当前国际先进水平,将引导国内企业加大研发投入,突破核心技术瓶颈。
加速车载 IMU 的国产替代进程。目前,导远电子等国内企业已经能够生产符合标准要求的高性能 IMU 产品。
4.4 为监管提供依据,保障自动驾驶安全
标准的实施将为政府部门对车载 IMU 产品的市场监管提供技术依据。
确保进入市场的 IMU 产品符合安全要求,为自动驾驶技术的大规模商业化应用奠定坚实的安全基础。
五、总结与展望
《车载定位系统技术要求及试验方法 第 2 部分:惯性测量单元》国家标准的发布,是我国车载 IMU 行业发展的重要里程碑。
它不仅结束了车载 IMU 行业长期无标可依的局面,还将推动整个行业向标准化、高质量方向发展。
互动讨论
你认为这份标准中哪项技术要求最严格,对行业影响最大?
目前你所在的公司使用的 IMU 产品是否能达到这些标准要求?
你觉得标准实施后,国产 IMU 企业和国际巨头相比会有哪些优势和挑战?
欢迎在评论区留言分享你的观点!也欢迎转发本文,让更多汽车技术同行了解这份重要的国家标准。
关注下面的微信公众号,回复关键字“20260503”免费获取上述标准全文
 10个月宝宝每天需要喝多少奶粉?
10个月宝宝每天需要喝多少奶粉?
