简介
自动驾驶车辆和先进机器人技术依赖于机器能够解读物理世界。为了训练这些系统,公司会从摄像头、激光雷达(LiDAR)及其他传感器收集大量原始数据。这些数据必须被标记,以便模型能够准确识别物体、运动、距离、道路状况、障碍物及其他真实信号。
这正是数据标签公司发挥作用的地方。在自动驾驶车辆和机器人领域,它们的角色不仅限于标记几张图像并发送回去。它还涉及长期收集、整理、保留和检索海量数据集。
| 其实际含义 |
| 摄入 | 从自动驾驶车辆或机器人团队接收大量原始数据集,如道路视频、激光雷达文件、摄像头画面及其他机器捕获数据 |
| 组织工作 | 对数据进行排序,使其能够实际操作,例如按车辆运行、位置、传感器类型、场景、项目、边缘情况或标签状态分类 |
| 保留 | 在第一次标记通过后保留数据,因为以后可能还需要用于质量保证、重新标记、再培训、审计或极少数的边缘情况 |
| 取回 | 需要时调回旧数据,比如重访夜间行人片段或检查完成标签集后的原始原始序列 |
从这个角度看,自动驾驶车辆和机器人的标注不仅仅是一项注释任务。这也是一个数据处理和存储问题。在这篇博客文章中,我们将重点介绍塑造这一领域的三个现实:
1. 自动驾驶车辆和机器人的标注涉及的数据集远比许多人想象的要大得多、更庞大
2.视频、激光雷达和多模态数据的标注比标准注释工作流程更复杂
3.在大规模情况下,归档数据不仅是存储问题,而是信任问题
最后我们将介绍Filecoin在这个堆栈中的位置,以及为什么它对于保留的数据变得重要,这些数据仍需保持持久、经济可检索和长期可信。
1. 数据集比最初看起来的要大得多、更重
关于自动驾驶车辆和机器人标签,首先要理解的是,工作流程始于大量机器生成的原始数据。在任何标签工作开始之前,团队就必须处理大量需要上传、整理和准备审核的视频和传感器数据。到那时,挑战就不再只是注释了。这也是从一开始就搬运和管理庞大数据集的操作工作。
自动驾驶车辆(AV)正在发展为移动计算平台,配备强大的处理器和多样化的传感器,能够生成大量异构数据,例如每天14TB。“——AVS论文,arXiv,2025年11月
这不仅仅是理论上的担忧。Rivian是一家正在开发自动驾驶功能的电动汽车制造商,已经用实际操作方式描述了这一问题。在2025年AWS案例研究中,AWS表示,Rivian的数据收集测试团队每天产生数TB的传感器和摄像头数据,这给上传、存储和处理带来了真正的挑战。
宝马又是一个例子,说明存储成本成为工作流程的一部分会发生什么。2025年,AWS表示与宝马合作开发了一个拍字节级自动驾驶数据湖,并基于访问模式识别录音以加快归档速度。目的不仅仅是存储更多数据,而是将较少活跃的录音更早转移到更便宜的档案存储,甚至可能在到达后几天内完成,而不是等待标准的30天过渡期。
这很重要,因为即使在标签、质量保证或重新处理开始之前,原始数据的规模已经相当可观。对于从事自动驾驶和机器人工作流程的团队来说,仅仅原始数据的规模就已将工作从轻量级注释推向存储密集型数据操作。
2. 视频、激光雷达和多模态标注比标准标注更难
第二个现实是,自动驾驶车辆和机器人工作流程中的“标签”并非单一任务。不同系统根据模型需要学习的内容,需要不同类型的标签。有些任务涉及在长视频序列中识别物体,有些则是标记三维LiDAR数据,还有些则需要多个传感器视角对齐同一场景。
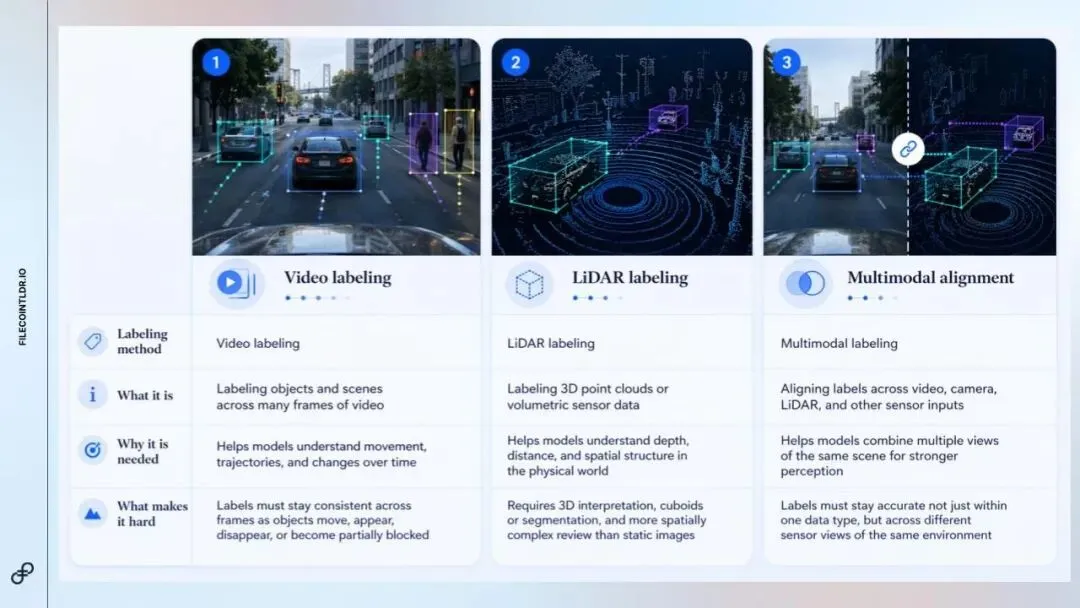
综合而言,这些方法使工作比标准注释更具挑战性。视频需要时间上的一致性。激光雷达需要对三维空间的理解。多模态工作流程要求标签在同一环境中的不同传感器视图之间保持一致。例如,Waymo的公众感知数据包括摄像头和激光雷达数据,以及二维和三维追踪和三维语义切割等任务。
这提醒我们,本部分并非处理简单的单次注释工作。它涉及更丰富的感知数据,通常需要更专业的工具、更严格的审查以及对同一底层数据集的反复审视。
因此,存储层在这里比轻量注释工作流程更为重要,因为数据通常需要保持可用,以便审查、重新标记和未来模型迭代。
3. 归档数据在大规模上成为未被证实的负担
一旦自动驾驶车辆和机器人数据集开始积累,挑战就不再只是它们存放在哪里。关键在于团队是否能信任数据在再次需要时仍能使用。
旧数据并不总是保持活跃,但很少变得无关紧要。团队可能需要恢复过去的视频片段、激光雷达扫描、传感器日志或标记数据集,用于质量保证、重新标记、模型迭代、边缘案例审查、审计支持或事件调查。
这造成了恢复信心差距:即相信归档数据安全与能够验证其仍然完整、可恢复且与正确源材料或数据集版本相关联之间的差距。这一差距很重要,因为许多系统将归档完整性视为一种假设。数据被写入、保存,并期望以后可用。但在高风险的AV和机器人工作流程中,团队最终可能需要证明:
这时,存储不仅仅是成本中心。成本、取回费和取回速度依然重要,但更深层次的操作难题是信心。如果归档数据难以验证、恢复成本高或在需要时不可靠,廉价存储是不够的。
简单的比较有助于让问题更加具体。可以考虑AWS S3标准和Akave Cloud,后者是由Filecoin支持的S3兼容存储服务:
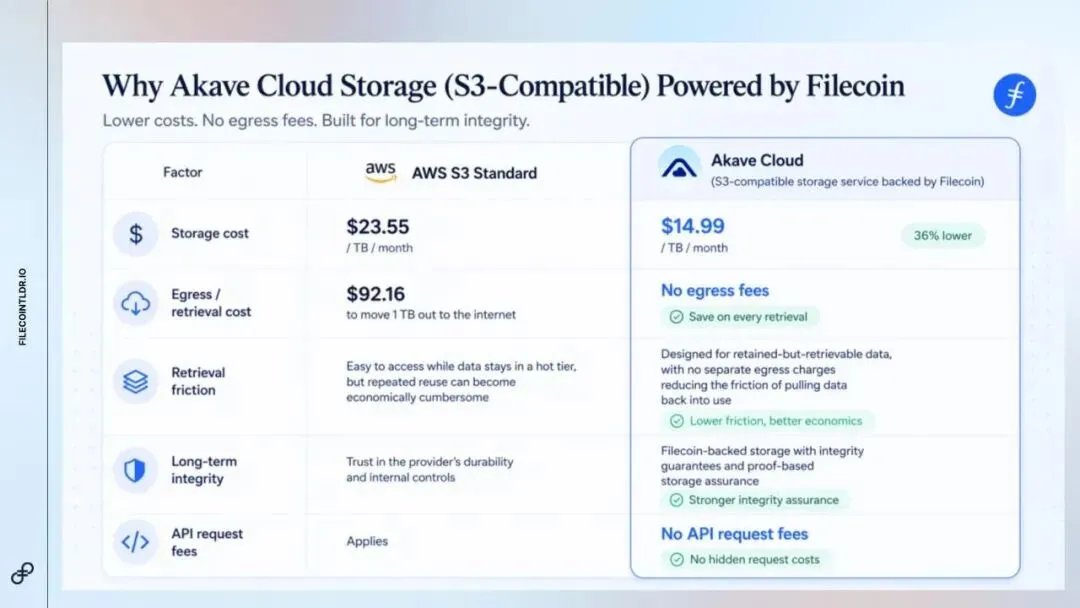
Akave Cloud 展示了如何将 Filecoin 支持的存储打包在熟悉的云界面中。但更重要的一点不仅仅是成本。这就是验证。Filecoin 基于一种基于证明的模型设计,数据的存在性和完整性可以随时间进行检查,而不仅仅是上传后假设。
对于视听和机器人标签来说,这种区分很重要。内容地址和来源有助于将数据与精确的文件、版本或数据集状态联系起来。去中心化存储网络还可以减少对单一服务提供商或内部系统的依赖。
问题不仅仅是存储在大规模化下变得更难。问题在于,除非团队能够验证数据依然可检索、完整且可用,否则归档数据将成为一种未证实的责任。这正是Filecoin的重要性更加明显的地方:它解决的是证明问题,而不仅仅是存储问题。
结论
总之,当将这些工作流程理解为不仅仅是注释任务,而是长期数据基础设施问题时,Filecoin在自动驾驶和机器人标签中的相关性就更加清晰。
每一段视频剪辑、激光雷达扫描、传感器日志以及标记的边缘情况,都能在第一次训练运行后很长一段时间内依然有用。团队可能需要重新审查旧标签、复现过往数据集、调查模型行为,或保留历史证据以供安全、质量保证和审计使用。在这样的背景下,问题不再只是数据存储在哪里。关键在于球队能否自信地恢复这种状态。
这正是Filecoin角色更加具体的地方。它并非旨在取代杀毒或机器人数据堆栈的每一个部分,而是支持保留数据层,而保留数据层在这些层中,最看重耐用性、可检索性和可验证性。通过基于证明的存储、内容寻址以及像Akave Cloud这样的Filecoin支持服务,团队可以开始将长期数据保留视为可以随时间检查和验证的,而不仅仅是假设。
随着视听和机器人数据集的不断增长,管理好数据基础的团队将拥有优势。未来不仅取决于谁能更快地标记数据,还取决于谁能保存、恢复并信任其模型继续依赖的数据。






 10个月宝宝每天需要喝多少奶粉?
10个月宝宝每天需要喝多少奶粉?
