一场正在发生的AI革命
一、困境:当机器只会”背诵规则”
2006年,一部名为《查理2号》的科幻喜剧电影上映。电影讲述了11岁的孤儿Felix,在生日那天收到了一台笔记本电脑作为礼物。一个意外的巧合——偷吃蛋糕的老鼠帮他下载到了实验室中的人工智能程序,激活了车库里的破车。
从此,一辆叫”查理二号”的汽车”活”了过来。
它不仅能自主驾驶,还能检索信息、转化能源,甚至带着小Felix找到了失散多年的哥哥。
试问,当年的哪个年轻人,不想拥有一台这样炫酷的汽车?
但现实是残酷的。
工程师们的尝试:让机器背诵交通规则
在很长一段时间里,自动驾驶采用的是最”笨”的方法:摄像头 → "看到前方有车" → 规则系统 → "踩刹车"
听起来很合理,对吧?
现实给了当头一棒
你正开车在一条城市道路上,前方有一辆违停的车。你准备变道绕行。突然,违停车的车门半开了,旁边还有个外卖小哥骑着电动车逆行冲过来。为什么?因为工程师没有写过一个规则,告诉系统在这种情况下该怎么办。
更可怕的是:无穷无尽的”长尾”
90%的场景(常见): 直行、跟车、红绿灯停——很容易解决 10%的场景(罕见): 各种奇葩、意外、无奈的情况——无穷无尽
比如:
长尾问题的恐怖在于: 它们发生概率极低,你无法在测试中穷尽;但只要基数够大,它们必然会发生。
而传统方法遇到没写过规则的长尾场景,大概率会做出灾难性决策。
工程师们陷入了绝望:规则永远写不完。
二、2024,改变一切的一年
转折点:当”原子弹”被引爆
这个版本被业内称为”奥本海默时刻”——证明了原子弹可以造出来。
为什么?
因为这是第一个真正端到端的自动驾驶系统。
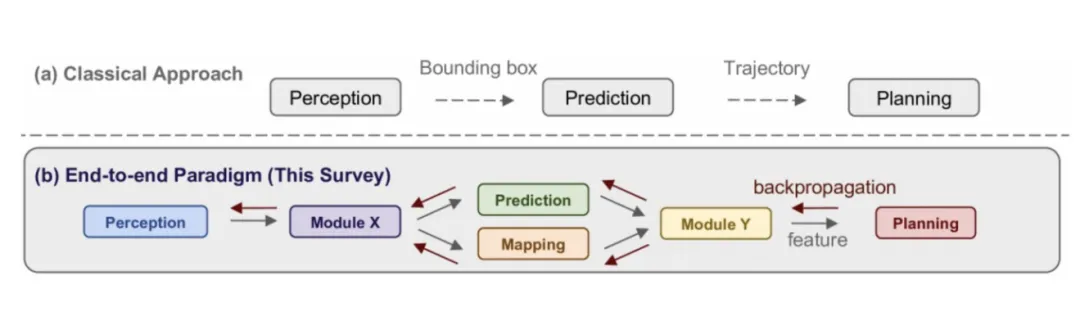
什么是”端到端”?
摄像头 → [感知] → "有车" → [规划] → "刹车" → [控制] → 执行
摄像头 → [一个巨大的神经网络] → 直接输出:方向盘、油门、刹车
区别在哪?
传统方法像是在教机器”背诵交通规则”。 端到端方法是让机器”像人类一样学习驾驶”。
特斯拉的疯狂想法
特斯拉收集了数百万辆车的真实驾驶数据,让神经网络从中学习:不是学习”遇到红灯就踩刹车”,而是学习”在某种视觉特征下,人类通常会怎么做”。
这就像教一个人开车:
- 你不是告诉他1000条规则
- 而是让他坐在副驾驶,看几百万小时的老司机开车
慢慢地,他就学会了。
结果震惊了世界
根据特斯拉的数据,FSD系统的事故率约为每510万英里一次重大碰撞。而美国人类驾驶的平均水平是:每70万英里一次。
也就是说,FSD比人类安全约7倍。
这一年,整个行业都醒过来了。
三、为什么”像人一样思考”更厉害?
你可能会问:不就是换了种方法吗,为什么差别这么大?其一:终于摆脱了”规则地狱”
端到端不需要写规则,它通过学习海量数据,自己”悟”出了规律。
就像人类学开车,不是靠背诵1000条规则,而是靠”感觉”。
其二:信息不再”丢失”了
传统方法中,感知模块只告诉规划模块”前方有障碍物”。但它没法传递”那个障碍物是一个正在招手的交警”这种丰富的语义信息。
信息在传递中损耗了。
而端到端系统,从摄像头直接到控制,中间没有信息损耗。
其三:终于能应对”奇葩场景”了
当端到端系统遇到一个从未见过的场景(比如前方真的掉下来一头猪),它不会傻掉。因为它学到的不是死板的规则,而是人类应对复杂情况的那种”直觉”。
它能够泛化,能够举一反三。
其四:越用越聪明
特斯拉有400万辆车在路上跑,每辆车都在收集数据。每辆车都在”影子模式”下运行:系统自己想怎么开,然后和人类司机的操作对比。
差距在哪里,就学习哪里。
这就是”数据飞轮”:
- 越多的车 → 越多的数据 → 越智能的系统 → 吸引更多的用户
一个正向循环开始了。
四、不只是一场特斯拉的革命
Waymo:另一条路线的探索
- 激光雷达 + 摄像头 + 雷达 - 在凤凰城、旧金山等城市运营Robotaxi优点: 可靠性高、全天候能力强 缺点: 成本高(单车15万美元+)、扩张慢
但它证明了:L4级自动驾驶,是可以实现的。
Rivian:用数据飞轮追赶
这是一个可持续的进化路径。
NVIDIA:用AI生成AI训练数据
NVIDIA在做一件更酷的事:用AI生成AI训练数据。既然现实中很难收集到”车上掉猪”的视频,那就用类似Sora的技术”捏造”出来。
然后在虚拟世界中,提前”消灭”长尾问题。
中国企业:快速追赶的浪潮
五、我们离终点还有多远?
问题一:什么是”终点”?
- 答案:已经非常近了,2027-2028年就能实现如果”终点”是L5级(任何场景、任何地点):
- 答案:可能还需要10-20年
如果”终点”是查理二号那样”有意识”的车:
- 答案:可能需要AGI(通用人工智能),那就更远了
问题二:还需要解决什么?
技术层面:
成本层面:
- 真正的L4级系统成本仍然高昂
法规层面:
- 全球还没有统一的认证标准
社会层面:
- 公众信任需要时间建立
但我们正在进步
- 2027-2028年:L4级Robotaxi在10-20个城市商业化
终点不是遥不可及,而是正在一步步靠近。
六、这不仅仅是一辆车的事
当你真正理解这场革命,你会发现:它的意义远超我们的想象。对我们每个人
高速驾驶大幅减负,堵车可适度放松;仍需时刻待命,随时接管车辆。 城市基本实现自动驾驶,复杂特殊场景仍需人工介入;车辆趋近成熟老司机水准。 真正实现无需人工驾驶,汽车进化为第三生活空间,彻底重构大众出行方式。对整个社会
对人类文明
其真正价值在于:是通用人工智能(AGI)落地的关键一步;引领具身智能跨越式发展;验证了数据驱动可破解现实复杂难题。这是人工智能从”理解世界”到”改变世界”的关键跨越。
七、对比:查理二号的梦想与今天的现实
那辆”有意识”的汽车,今天的技术与之相比:
查理二号的能力 | 2026年技术 | 实现程度 |
自主驾驶 | ✅ 特斯拉FSD、Waymo One | 已实现 |
数据检索 | ✅ ChatGPT集成 | 已实现(更强大) |
情感交互 | ⚠️ 简单交互 | 部分实现 |
废料转能源 | ❌ | 未实现 |
自我意识 | ❌ | 未实现 |
有些已经实现,有些还在路上,有些可能永远无法实现。
但更重要的是:
我们正在见证一场技术革命。
这场革命不是某个瞬间完成的,而是在持续的进步中,一步步逼近。
八、身处变革的时代,我们是幸运的
20年前,当《查理2号》上映时,我们以为那只是科幻。今天,当我们看到特斯拉FSD在城市道路上自如穿梭时,我们才知道:
那不是科幻,那是预言。
2026年,自动驾驶或许还没有”迈出最后一步”。
但:
为身处这个伟大的变革时代,我们感到自豪。
因为我们知道:
每一次技术的突破,都是人类智慧的一次胜利。每一次系统的升级,都是向未来迈进的一步。每一次安全的里程,都是对生命的最好守护。
未来已来,只是分布不均。
让我们一起,驶向那个未来。
1.The Era of End-to-End Autonomy: Transitioning from Rule-Based Driving to Large Driving Models ,MARCH 2026 https://arxiv.org/pdf/2603.16050
2.揭秘智能驾驶技术路线:端到端与模块化的较量https://b23.tv/QeAG5ae3.J. Huang, “Nvidia ai technology for autonomous driving.” CES 2026 Keynote, 2026.
4.H. Liu, Z. Cao, X. Yan, S. Feng, and Q. Lu, “Autonomous vehicles: A critical review (2004-2024) and a vision for the future,” Authorea Preprints, 2025
5.【端到端智驾,是如何“思考”的?理想让AI推理可视化!】 https://www.bilibili.com/video/BV1NU6bYNE9e/?share_source=copy_web&vd_source=39de6ad5b844013994c07c3cf52466f6










 10个月宝宝每天需要喝多少奶粉?
10个月宝宝每天需要喝多少奶粉?
