过去十年里,车辆安全始终是所有主流高级驾驶辅助系统(ADAS)及自动驾驶项目的核心设计约束条件,而交通事故的严重规模也足以解释其重要性。仅在美国道路上,每年就有超 4 万人死于车祸、逾 250 万人在事故中受伤。美国与英国的官方数据均表明,超 80% 的重大交通事故都与人为失误相关,其中分心驾驶、状态失常及疲劳驾驶是最常被提及的诱因。
从基础版高级驾驶辅助系统向高阶车辆自动驾驶技术迭代,有望降低交通事故的发生频次与严重程度。而雷达、人工智能等多模态传感技术的不断进步,正让这一技术落地变得愈发具备现实可行性。
业界在打造自动驾驶感知能力的路径上,分化为两大技术方向。部分车企采用视觉摄像头主导的感知方案,目前已大批量搭载于民用乘用车;另有企业搭建多传感器阵列,将视觉摄像头、激光雷达与毫米波雷达整合为一体化感知架构。多传感器融合方案在全自动无人驾驶网约车车队中应用最为广泛,这类场景下,多类传感器的冗余配置被视作基础安全硬性要求。
多传感器阵列具备天然的安全优势,一类传感方式的短板可由另一类的优势进行弥补。例如,摄像头能够识别红绿灯状态、读取交通标识,还可以区分校车与货运面包车。而雷达作为互补传感器,可在各类天气条件下稳定工作,借助多普勒效应直接测算物体速度,同时具备更远的探测距离。
将两类传感器的能力进行融合后,所构建的感知系统远比单一传感器更为稳定可靠。且雷达不惧强光眩光、浓雾及雨雪天气,这一特性对于打造安全可靠、能够赢得公众信任的自动驾驶系统尤为关键。
行业发展趋势已愈发清晰。目前投入商业运营的头部无人驾驶网约车车队之一(不透露名字),标配 14 颗摄像头、4 颗激光雷达与 6 颗雷达,并配备外置音频接收器,用于识别紧急车辆警报声。
量产车型可搭载的传感器数量始终受成本制约,业内工程师都在探索新方案:在提升感知性能的同时,降低硬件整体复杂度。值得注意的是,该网约车车队的最新一代车型,摄像头总数削减超半数,激光雷达从 5 颗精简至 4 颗,雷达数量则保持不变。行业重心正从堆砌传感器数量,转向挖掘单颗传感器的数据质量。
摄像头与激光雷达依赖可见光或近红外光,在雾、雨、雪天气下性能会大幅衰减。随着自动驾驶车辆从阳光地带、湾区,逐步向气候恶劣、能见度偏低的地区拓展落地,搭载雷达将变得愈发重要,可在更多复杂工况下守住安全阈值。
汽车 77 吉赫兹频段的雷达波能够穿透浓雾、大雨、烟雾、粉尘与降雪,信号衰减极低。该技术不受弱光环境影响;车辆进出隧道等光线剧烈变化的场景中,雷达也无需适配缓冲时间。
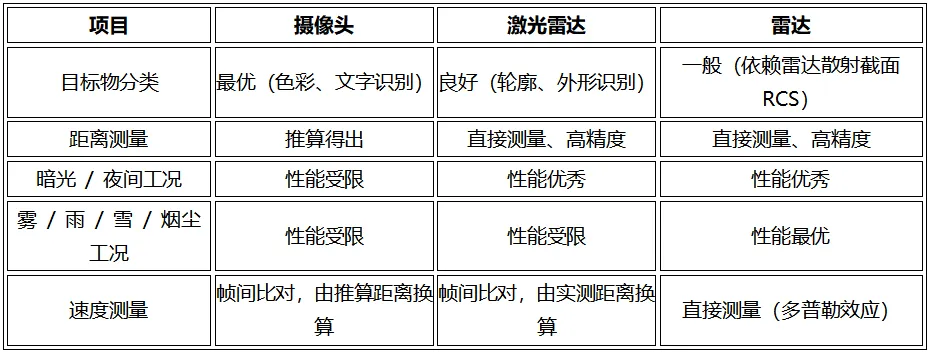
雷达可通过多普勒频移直接测量物体速度,实现连续测速,无需依靠连续图像帧比对推算。同时雷达不局限于视距探测,能够侦测前方车辆遮挡下的盲区障碍物,为紧急避险操作争取更多反应时间(见表1)。
表1 三种类型识别方式的对比
传统 3D 雷达可探测距离、角度与速度,但缺少高度维度数据,无法判断探测目标是位于路面上方(如桥梁、高架标识牌),还是行驶路径上的实体障碍物。为弥补这一缺陷,许多 3D 雷达系统会通过程序设定,忽略超出特定尺寸或特定位置的静止物体。一旦该判定逻辑出现偏差,便可能引发严重安全后果。
4D 雷达新增高度测量能力,可解析竖直平面内的目标物信息。凭借每个探测点完整的空间位置数据,系统能将桥梁与桥下行驶车辆精准区分、把龙门架标识与路面故障货车分离开来,同时提供高度信息,为高车身车辆通行限高路段提供关键依据。
更丰富的空间信息还能生成更密集的点云。传统 3D 雷达往往只能输出稀疏探测点簇,难以完成目标分类;而 4D 雷达可生成高密度点云,清晰还原各类物体与交通参与者的轮廓形态,让雷达具备了以往仅激光雷达才能实现的空间细节感知能力。
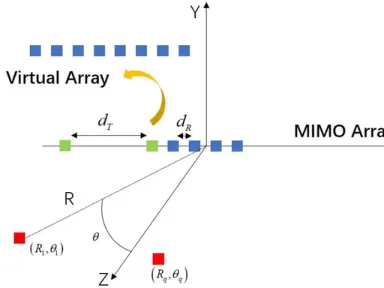
那么什么是4D雷达呢?传统雷达仅能探测距离、速度、水平方位角(3D);4D 雷达新增俯仰角(高度)维度,实现距离、速度、水平角、高度四维同步感知,如图1。
图1 4D雷达覆盖维度示意图
作为自动驾驶的关键,4D雷达具有如下几个核心优势:
立体空间感知:生成类激光雷达(LiDAR)的高密度点云,区分地面障碍物与天桥、限高杆等悬空物体,避免误判。
全气候可靠:雨、雾、雪、黑夜中稳定工作,弥补摄像头 / LiDAR 在恶劣天气下的性能短板。
精度与简化平衡:角分辨率可达0.1° 级,探测距离超300 米;相比复杂传感器堆叠,4D 雷达可降低系统复杂度与成本。
多目标精准追踪:同时识别车辆、行人、非机动车,实时预测轨迹,支撑 L3/L4 级自动驾驶的冗余感知。
目前,4D 雷达正从 “辅助传感器” 升级为感知冗余核心层,推动自动驾驶从 “传感器堆砌” 向 “高可靠、低成本” 架构演进,加速高阶自动驾驶的规模化落地。下面我们将列举一些考验车载感知系统极限的典型复杂场景,并结合2026 年国际消费电子展(CES) 的实测演示结果,阐述 4D 雷达如何以更高性价比集成应用于量产车型。
1 桥梁与龙门架识别
3D 雷达探测到车辆前方有大型静止物体时,无法判别其为可正常通行的桥梁,还是需要紧急避让的路障。由于缺少高度维度数据,系统要么无故刹车产生幽灵刹车,要么默认该物体无威胁,埋下安全隐患。
4D 雷达凭借竖直角度分辨率新增高度测量能力,解决了这一难题。在奥库利(Oculii)4D 雷达系统测试中,高速公路龙门架等高架构筑物的 Z 轴探测高度可达路面上方约 12 米。该能力对商用车尤为关键,这类车辆始终需要关注桥梁限高问题。系统可生成带高度分层配色的 3D 点云地图,让感知架构能够精准判断车辆能否安全从下方通行。
2 隧道场景
隧道对感知系统存在双重挑战:
对摄像头而言,室外强光与隧道内部光线急剧切换,容易出现画面过曝或欠曝,在光线切换的关键瞬间大幅降低有效视觉信息。
对传统雷达而言,隧道封闭结构会使雷达波在墙壁、顶棚产生多路径反射,形成信号干扰,难以区分真实障碍物与反射杂波。
实测中,奥库利 4D 雷达可在隧道内实现纯净目标检测,有效抑制多路径反射干扰。依托更强的角度分辨率,在摄像头与传统雷达均极易失效的封闭环境中,仍能保持稳定可靠的感知能力。
3 远距离小目标探测
路面小动物与小型障碍物探测难度极大,因其雷达回波信号接近噪声阈值。若探测不稳定,系统容易将目标误判为干扰信号,等到识别为时已晚、来不及避险。动物属于雷达弱反射目标,探测难度更高。
安霸(Ambarella)采用一只体型近似博美犬或大型家猫的玩具小狗开展测试,测试车辆向目标直行。多次测试结果显示:奥库利 4D 雷达稳定探测距离超过 100 米,目标轨迹连续无闪烁、无虚警鬼影,足以支持车辆时速 70 英里以上完成紧急制动。而同工况下,车载激光雷达即便距离仅 30 米也无法识别该目标。
进一步测试中,奥库利 4D 雷达可在235 米距离外稳定识别塑料路障,并从复杂背景杂波中精准区分;相同条件下,车载激光雷达仅能在 52 米处探测到同类路障。
4 弱势道路参与者识别
行人、骑行者等弱势道路参与者检测,是车载感知系统最核心、关乎安全责任的能力。多数地区法规规定:若发生碰撞,若无相反证据,责任将直接判定给驾驶员或车辆运营方。行人和骑行者雷达反射信号弱,特征容易被周边车辆、道路设施的强回波信号掩盖。
近距离场景下,奥库利 4D 雷达凭借优异的角度与距离分辨率,可还原人体轮廓细节,足以支撑多传感器融合架构完成目标分类。远距离测试中,系统可在350 米外识别停靠车辆旁的行人;即便行人被遮挡、无直接视距,仍能在143 米距离完成识别。
道路实车测试还显示:该系统点云密度足以在150 米外分辨自行车车轮,以及骑行者头部、躯干、腿部的完整轮廓形态;而同距离下,传统雷达会将骑行者级别的回波直接判定为噪声过滤掉。
5 软件定义的雷达集成方案
4D 雷达要实现大规模装车普及,必须兼容现有整车电子架构,无需大规模重新设计。
在 2026 年 CES 展上,安霸展示了一套成熟方案:基于自研奥库利 4D 成像雷达软件,运行在单颗 CV3 系统级芯片(SoC)上。
演示车辆选用普通租赁量产车,刻意以此证明该系统无需大幅改装即可完成集成。CV3 芯片部署在车前远距离雷达单元内,同步处理该雷达以及车身四角 4 颗近距离雷达的原始数据,生成360° 全景统一点云,再发送至负责传感器融合的区域控制器。
该架构支持车企采用无处理器单片微波集成电路(MMIC)雷达探头设计,雷达原始数据直接上传至 CV3 等中央域控制器。前向雷达外形安装接口与现有车型几乎一致,模块化兼容,无需重新设计保险杠,大幅降低集成改造成本。
安霸拥有专利虚拟孔径成像技术与人工智能算法,可实时动态自适应雷达波形,无需额外增加物理收发器件,即可实现0.5° 角度分辨率、最远350 米探测距离。
这种架构将雷达算力集中至前向雷达单元,降低整机成本;同时在不改动整车电子电气架构、无需全面更换传感器硬件的前提下,实现 4D 雷达快速集成落地。
对于仍在用传统 3D 雷达的车企,这是一条平滑升级至 4D 雷达能力的可行路径;对于已布局 4D 雷达的车企,这套基于单颗 SoC、AI 波形自适应的集中式软件定义方案,可提供满足 L2 + 至 L4 级别自动驾驶感知架构所需的角度分辨率与远距离探测性能。
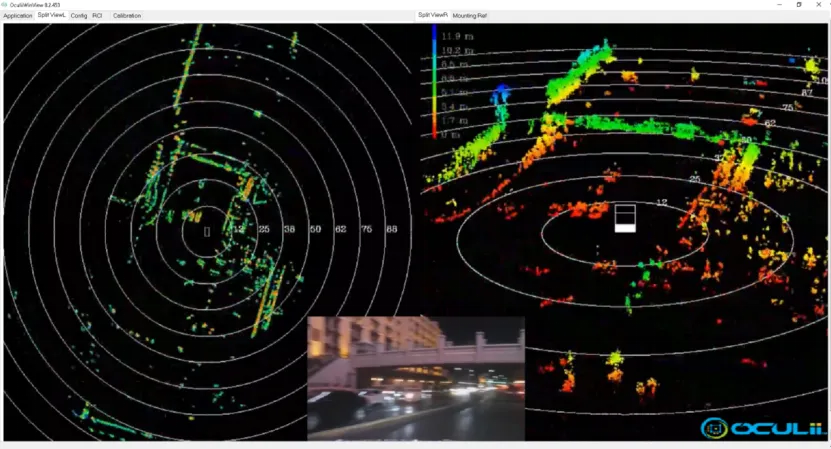
图 4D雷达扫描的场景示意图
多年来,雷达一直是多传感器感知架构的标配,但早期仅局限于前向碰撞预警、自适应巡航等基础功能。3D 雷达生成的点云过于稀疏,无法满足高阶自动驾驶对目标分类与稳定轨迹跟踪的精度要求,也因此长期在感知系统中处于辅助地位。
依托单颗 SoC 搭载 AI 波形自适应、集中式算力处理的 4D 雷达,彻底改善了点云稀疏短板。如今 4D 雷达点云信息量足以精准分辨各类道路参与者、隔离高架构筑物与地面障碍物,并在复杂杂波环境下保持目标轨迹稳定。
高端激光雷达绝对点云密度更高,但在高速行驶工况下,其多余的密度冗余已超出感知决策的实际需求。此外,激光雷达在雾、雨、雪恶劣天气下存在天然性能衰减,而雷达不受此类环境影响。
对车企而言,核心问题在于:4D 雷达的点云密度是否已达到对应自动驾驶等级的够用阈值。2026 年 CES 实测结果表明,在绝大多数 L2 + 到 L4 级自动驾驶场景中,4D 雷达已完全达标。
本次实测基于一台普通租赁量产车,搭载单颗 CV3 芯片处理 5 颗奥库利雷达探头原始数据:可识别激光雷达探测不到的小型弱反射目标、隧道内稳定感知、350 米远距离追踪行人。这套软件定义架构无需重构整车电子架构,破除了高阶自动驾驶大规模搭载 4D 雷达的核心阻碍。
对于正在规划下一代传感器配置的工程团队,集中式 4D 雷达的性能表现与集成适配能力已大幅提升,值得重新评估与采用。

 10个月宝宝每天需要喝多少奶粉?
10个月宝宝每天需要喝多少奶粉?
