一文看懂自动驾驶技术核心算法
- 2026-05-10 15:01:19
很多人对自动驾驶的理解,还停留在一句话:
“不就是 AI 开车吗?”
但如果你真拆开来看,会发现自动驾驶系统干的事,其实和人类司机一模一样:
看清楚周围有什么(感知)
猜一猜别人接下来要干嘛(预测)
决定自己该怎么开(决策 / 规划)
只不过,人靠眼睛和大脑,自动驾驶靠 传感器 + 算法 + 算力。
一、感知(Perception):车要先“看得见”
如果说自动驾驶是个人,那感知系统就是它的眼睛和耳朵。
1️⃣ 自动驾驶都“看”些什么?
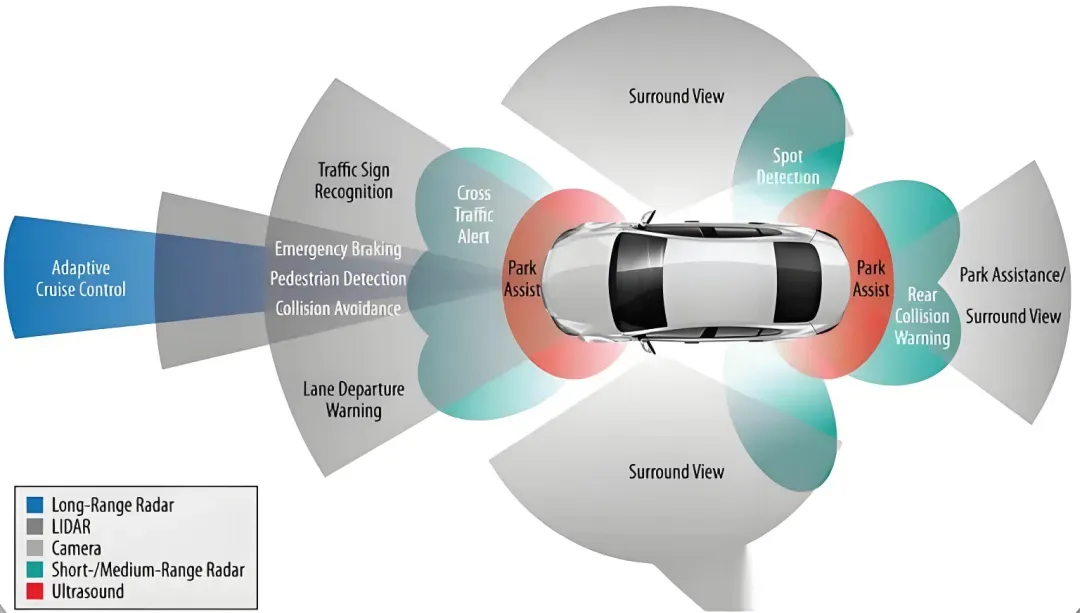
核心传感器无非三类:
Camera(摄像头):看颜色、看车道线、看红绿灯
LiDAR(激光雷达):量距离,构建 3D 世界
Radar(毫米波雷达):测速度、抗雨雪
感知算法的目标只有一句话:
把真实世界,变成计算机能理解的结构化数据。
比如:
这里有一辆车
那里有个行人
前方 30 米是红灯
2️⃣ 一个最典型的感知任务:目标检测
以摄像头为例,最常见的就是 目标检测。
简化版逻辑大概是这样:
代码语言:Python
# 假设使用深度学习模型做目标检测image = load_image("front_camera.jpg")detections = model.detect(image)for obj in detections:print(obj.label, obj.bbox, obj.confidence)输出可能是:
代码语言:TXT
car [x1,y1,x2,y2] 0.92pedestrian [x1,y1,x2,y2] 0.88traffic_light_red [...] 0.95这一步,相当于司机在心里默念:
“前面有车,右边有人,红灯亮了。”
3️⃣ 为什么“多传感器融合”这么重要?
现实世界是脏的:
摄像头怕黑
激光雷达怕雨
雷达分辨率低
所以自动驾驶几乎一定会做 Sensor Fusion:
代码语言:TXT
Camera + LiDAR + Radar → 更稳定的世界模型我一直觉得这点特别像人:
下雨天你会更依赖听觉,晚上你会放慢速度。
自动驾驶也是一样。
二、预测(Prediction):难点不在算力,在“人性”
如果说感知是“看清楚”,那预测就是:
猜别人接下来要干嘛。
这一步,是真的难。
1️⃣ 预测的对象是谁?
前车会不会刹车?
行人会不会横穿?
旁边那辆车要不要变道?
你会发现,预测的对象 不是物体,而是“意图”。
2️⃣ 一个极简的轨迹预测示意
展开
代码语言:Python
# 历史轨迹history = [ (x1, y1), (x2, y2), (x3, y3),]# 预测未来几秒的位置future_path = trajectory_model.predict(history)输出可能是多条路径:
代码语言:TXT
Path A: 直行(概率 0.6)Path B: 右转(概率 0.3)Path C: 急停(概率 0.1)注意这里的关键词:概率。
预测不是算命,而是:
给出多种可能性,并标注风险大小。
3️⃣ 为什么预测是自动驾驶的“分水岭”?
说句掏心窝子的:
感知拼的是数据和模型,预测拼的是“对人类的理解”。
有些行为,你永远很难靠规则覆盖:
行人低头刷手机
老司机突然加塞
外卖小哥逆行
这也是为什么现在很多系统:
预测模块大量用深度学习
强调不确定性建模
宁愿“保守”,也不“激进”
三、决策与规划(Decision & Planning):算法要为结果负责
终于来到最关键的一步:
我该怎么开?
1️⃣ 决策的本质:在约束下找最优解
自动驾驶的决策,本质上是在解一个优化问题:
不撞人(安全)
不闯红灯(规则)
不太慢(效率)
别太晃(舒适)
你会发现,这和人生选择一模一样 😂。
2️⃣ 一个简化的决策伪代码
展开
代码语言:Python
candidates = generate_candidate_trajectories()best_score = float("inf")best_path = Nonefor path in candidates: cost = ( collision_cost(path) + rule_violation_cost(path) + comfort_cost(path) )if cost < best_score: best_score = cost best_path = path最终选出的那条路径,就是车“决定”要走的路。
3️⃣ 为什么决策不能只追求“最优”?
我见过一个很真实的 case:
系统为了效率
总是贴着安全边界走
理论上没问题
但乘客:“这车怎么这么吓人?”
后来他们加了一条规则:
“看起来像人开的车”
于是:
多留点安全距离
刹车更柔
转弯更保守
结果投诉直接下降。
👉 自动驾驶不是数学竞赛,是社会系统。
四、把三者连起来:这是一条“责任链”
用一句话总结三者关系:
感知负责看清世界,预测负责理解他人,决策负责对后果负责。
一旦出事,问题一定在链路上:
看错了?
猜错了?
选错了?
这也是为什么现在的自动驾驶系统:
日志巨细无遗
每一步都可回放
算法结果要可解释
五、我个人的一点感受
说点不那么技术的。
我一直觉得,自动驾驶最难的不是模型精度,而是对“人”的敬畏。
你写的每一行代码,都在替人类做决定:
该不该刹?
该不该让?
该不该赌?
所以真正成熟的自动驾驶系统,往往有一个共同点:
它们不激进,很“怂”。
但这种“怂”,恰恰是工程成熟的表现。
六、最后总结一句
自动驾驶算法的核心,不是某一个模型,也不是某一篇论文,而是这条链路:
感知 → 预测 → 决策
任何一环偷懒,最终都会在现实世界里被狠狠教育。
如果你真想入门自动驾驶,我建议你先问自己一个问题:
“如果我是那辆车,我敢把命交给这套算法吗?”
想清楚这个问题,你写出来的代码,会完全不一样。
随机文章
-
 10个月宝宝每天需要喝多少奶粉?
10个月宝宝每天需要喝多少奶粉?
- 双钱轿车轮胎深海系列臻选:245/45R18,与米其林共同研发静音科技型轮胎:全车安排上车:松江区车墩镇松闵路880号:13564007010
- 交通行业标准《公路工程设施支持自动驾驶技术指南》(JTG/T 2430-2023),供参考学习,文后可下载.
- 紧凑级轿车的黄昏时刻:福克斯,为什么会走到今天?
- 昨天去物理AI 及自动驾驶企业【元戎启行】的深圳总部拜访朋友,参观他们办公室时,朋友介绍到公司几乎所有同事都一起在工位办公,CEO也没
- 归因图能预测自动驾驶风险?中山大学&南洋理工最新研究:0.77 AUROC碰撞预测
- 捷达轿车转向系统设计!车辆工程设计!整套CAD+说明书+开题报告!
- 2026梅赛德斯-奔驰S级轿车保客私享品鉴活动
- 拿捏自动驾驶的竟是“它”?!
- 15.99万买近5米合资大轿车,别克君越到底值不值?
- A哎,燕京“SUV”不是车,而是......
