在新能源汽车爆火的今天,“智驾”成了车企宣传的关键词。从小鹏的“城市NOA”到理想的“高速领航”,再到特斯拉的FSD,似乎人人都在谈“智能驾驶”。但你有没有想过:自动驾驶和智能驾驶,真是一回事吗?
答案是:不是。二者背后存在着技术成熟度、法律责任和硬件需求的巨大鸿沟。而作为车辆“大脑”的芯片选型,更是二者分水岭的核心。
今天这篇干货文章,将从概念拆解、技术架构、芯片选型到未来趋势,一次性讲透,为行业从业者、技术爱好者及消费者提供全面参考。读完你会发现:选对芯片,才能真正拥抱智能时代。
智能驾驶和自动驾驶的本质区别
要理清二者关系,首先需明确核心定义。简单来说,智能驾驶是“人机协同” 的辅助系统,自动驾驶是 “系统主导” 的无人化系统,后者是前者的高阶形态。根据中国国标(GB/T 40429-2021)和国际SAE J3016标准,汽车驾驶自动化分为L0-L5六个等级:
L0(无驾驶自动化):纯人工驾驶,无任何辅助功能;
L1(驾驶员辅助):单一功能辅助(如 ACC、车道偏离预警),属于智能驾驶;
L2(部分驾驶自动化):多项功能组合(如全速域ACC + 车道居中),系统控制转向 / 加减速,驾驶员需时刻监督,属于智能驾驶(主流量产);
L3(有条件驾驶自动化):特定场景(如高速、拥堵路段)系统完成全驾驶操作,驾驶员仅需在系统提示时接管,属于智能驾驶向自动驾驶的过渡形态;
L4(高度驾驶自动化):限定场景(如封闭园区、城市特定区域)完全无人化,无需人类干预,属于自动驾驶;
L5(完全驾驶自动化):全场景(城市、高速、乡村道路等)无限制自主驾驶,无方向盘 / 踏板,属于终极自动驾驶(研发阶段)。
其中,L0-L2属于驾驶辅助阶段,这就是我们常说的“智能驾驶”(或称ADAS,高级驾驶辅助系统)。车辆能辅助控制速度、车道保持、自动紧急制动等,但驾驶员必须全程监控、双手握方向盘,随时准备接管。责任主体是人。而L3-L5则属于自动驾驶阶段,是真正的自动驾驶。
为更直观区分,整理核心差异如下:
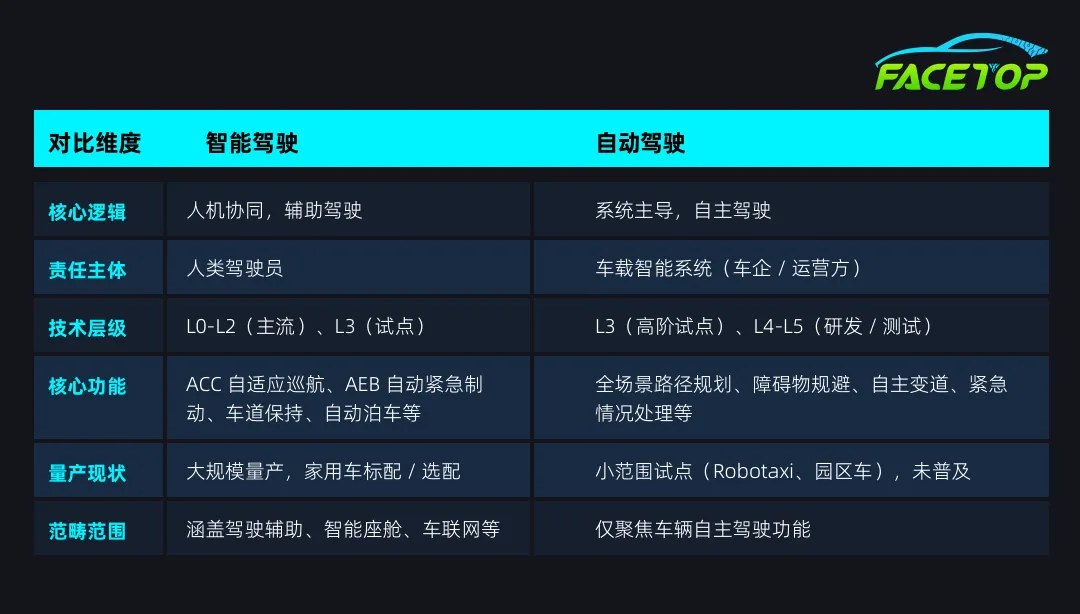
智能驾驶与自动驾驶在技术架构上虽均遵循感知-决策-执行三层经典框架,但在实现深度与技术复杂度上存在本质差异。
感知层面
智能驾驶多采用摄像头搭配毫米波雷达的简易方案,数据量相对有限;而自动驾驶必须依靠多传感器深度融合,综合运用摄像头、激光雷达、超声波雷达、IMU 及 V2X 等多源感知设备,单日数据量可达 TB 级,并对数据实时融合处理能力提出极高要求。
决策层面
智能驾驶以规则逻辑结合简单AI 模型为主;自动驾驶则依赖 BEV、Transformer、Occupancy Network 等端到端大模型,具备复杂环境下的行为预测、路径规划与交通博弈能力。
执行层面
智能驾驶仅需完成辅助驾驶指令;自动驾驶则要求转向、制动等关键系统具备冗余设计,以保障极端故障下的行车安全。
如果将智能驾驶比作“聪明的副驾”,那么自动驾驶更像是一位独立可靠的机器人司机,而作为决策层核心的车载芯片,直接决定了整套系统的算力上限与智能上限。
芯片是智能驾驶与自动驾驶系统的“大脑”,负责处理传感器数据、运行 AI 算法、输出决策指令。由于二者场景复杂度、技术层级、安全要求差异巨大,其芯片选型在算力、架构、安全等级、功耗及成本等核心维度呈现截然不同的特点。
智能驾驶芯片:平衡实用、成本与可靠性
智能驾驶(L0-L2 为主)面向家用量产车,核心需求是满足基础辅助功能、控制成本、稳定可靠、适配车规环境,无需极致算力,强调 “够用即好、性价比优先”。
(1)算力需求:中低算力(10–100 TOPS),主要处理摄像头、毫米波雷达等有限传感器的数据,运行目标检测、车道线识别等轻量级算法,对算力要求较低。
(2)架构特点:采用高度集成的异构SoC架构,将CPU、GPU或NPU、ISP(图像信号处理)、以及实时控制MCU集成在单一芯片中,以较低功耗和成本实现“感知+简单决策+控制”的闭环处理;其设计重点在于中等算力、高集成度、实时性与车规级稳定性,同时配合成熟的软件工具链与算法生态,支撑L2/L2+级辅助驾驶功能的规模化量产。
(3)安全等级:需满足AEC-Q100 Grade 2/3车规要求(工作温度-40℃~105℃)。功能安全按ISO 26262,主流L2级芯片达ASIL-B;关键执行环节(如AEB)可冗余至ASIL-C,避免过度设计以控制成本。
(4)选型逻辑:在智能驾驶场景中,芯片选型遵循典型的工程务实逻辑:
首先考虑成本,以保证方案具备量产落地的商业可行性;其次是功耗,关系到整车热设计与能效表现;再次才是算力,只需满足视觉感知与基础决策即可;最后是生态,包括SDK、开发工具链与算法支持。
基于这一优先级,行业通常倾向于选择成熟稳定的SoC平台,优先采用已经经过大规模量产验证的芯片方案,从而降低开发风险与周期,同时依赖完善的软件生态提升开发效率和系统可靠性。
(5)智能驾驶典型芯片对比:

自动驾驶芯片:极致算力、安全冗余与实时性
自动驾驶(L4–L5)面向Robotaxi、干线物流等无人化场景,核心需求是处理海量异构传感器数据、运行大模型算法、实现毫秒级实时决策,并满足最高等级功能安全。性能与安全优先,成本容忍度较高。
(1)算力需求:算力需求(200–1000+ TOPS),需融合多路摄像头、激光雷达、毫米波雷达、V2X等数据,运行BEV感知、Transformer、端到端决策等大算力模型。L4级起步200 TOPS,L5级普遍需500 TOPS以上,头部方案已超过1000 TOPS。
(2)架构特点:通常采用高算力异构计算架构,由CPU、GPU以及专用AI加速器(如NPU/TPU)协同组成,并配备独立的安全MCU模块以满足车规级功能安全要求;其设计强调超大规模并行计算能力与高带宽数据处理能力,以支撑多传感器数据的实时融合与复杂决策。
同时,这类芯片往往通过多芯片协同与冗余设计(如双系统备份)提升系统可靠性,并结合高速互联与大容量内存,构建接近“车载数据中心”的计算平台,以满足L3及以上自动驾驶对实时性、安全性和稳定性的严苛要求。
(3)安全等级:AEC-Q100 Grade 1 + ASIL-D全冗余。通过最高等级车规认证(-40℃~125℃宽温、强抗干扰)。核心链路功能安全须达ASIL-D,采用双核锁步、ECC纠错、硬件冗余等设计,确保单点故障不导致系统失效。
(4)选型逻辑:在自动驾驶场景中,芯片选型逻辑核心优先级依次为算力、安全性、带宽与冗余设计。由于系统需要完成复杂的多传感器融合、环境建模与路径规划,因此必须具备极高的AI算力与数据吞吐能力,同时满足严格的功能安全要求(如ISO 26262标准中的ASIL-D等级)。
在具体选型时,还需重点评估芯片是否支持多传感器高精度同步、实时推理能力、车规级认证以及OTA升级能力,并通过多芯片或冗余架构设计,确保系统在极端情况下依然具备可靠性与安全性。
(5)自动驾驶典型芯片对比:

芯片选型对比表:

随着算法与硬件的持续演进,智能驾驶与自动驾驶之间的技术边界正逐步模糊,芯片选型也呈现出更加一体化的发展趋势。
算力下放,能效持续升级
在算力层面,高阶自动驾驶所需的计算能力正逐渐向L2+级车型下沉。以BEV(鸟瞰图感知)和Transformer为代表的算法不断优化,使得原本依赖超高算力的平台逐步实现效率提升,带动100–300 TOPS级芯片开始应用于中高端量产车型,使智能驾驶系统从“功能可用”向“体验提升”演进,推动行业迈向“更高算力与更优能效比并重”的发展路径。
架构融合,异构优势凸显
在芯片架构层面,通用计算平台与专用加速芯片的融合趋势愈发明显。以NVIDIA为代表的通用平台具备较强的灵活性和生态优势,适用于复杂多变的自动驾驶场景;而地平线等厂商则通过面向特定算法优化的专用架构,在功耗与成本控制方面具备优势。未来车载计算平台很可能演进为“通用计算 + 专用加速”的异构融合架构,在性能、功耗与适配性之间取得更优平衡。
国产崛起,重塑产业格局
此外,以地平线、黑芝麻智能等为代表的本土企业,已在L2–L3级智能驾驶市场实现规模化应用,并逐步向更高算力与更高安全等级的自动驾驶芯片迈进。虽然在L4及以上领域仍与国际领先厂商存在一定差距,但随着技术积累与量产经验的提升,国产方案在中高端市场的渗透率持续提高,推动整车供应链向更加自主可控的方向发展。
综上,智能驾驶与自动驾驶绝非一回事:
前者是“人机协同” 的辅助系统,覆盖 L0-L3,面向家用量产车,芯片选型重性价比、稳定性、低功耗;
后者是 “系统主导” 的无人化系统,覆盖 L3-L5,面向试点场景,芯片选型重极致算力、绝对安全、实时响应。
对于消费者而言,分清概念能避免被“自动驾驶” 营销话术误导,理性看待车辆智能功能;对于行业从业者而言,明确芯片选型差异,能精准匹配场景需求,平衡技术、成本与安全,推动汽车智能化产业健康发展。
未来,随着技术持续突破,智能驾驶与自动驾驶将逐步融合,芯片也将朝着高算力、低功耗、高安全、低成本、国产化方向持续演进,最终实现“安全、高效、便捷” 的终极出行目标。
—end—
推荐阅读:
2026地平线征程7芯片量产对行业影响解析
黑芝麻vs高通:舱驾融合中的开放性与平台成熟度权衡对比
谁在定义2026智能汽车SoC主流路线,四大厂商对比
全民AI座舱时代的性能标杆:芯驰X10芯片深度解析
征程 6 VS A2000:谁主宰下一轮国产智驾芯片格局?
告别传统感知,智驾芯片迎来全新淘汰赛!


 10个月宝宝每天需要喝多少奶粉?
10个月宝宝每天需要喝多少奶粉?
