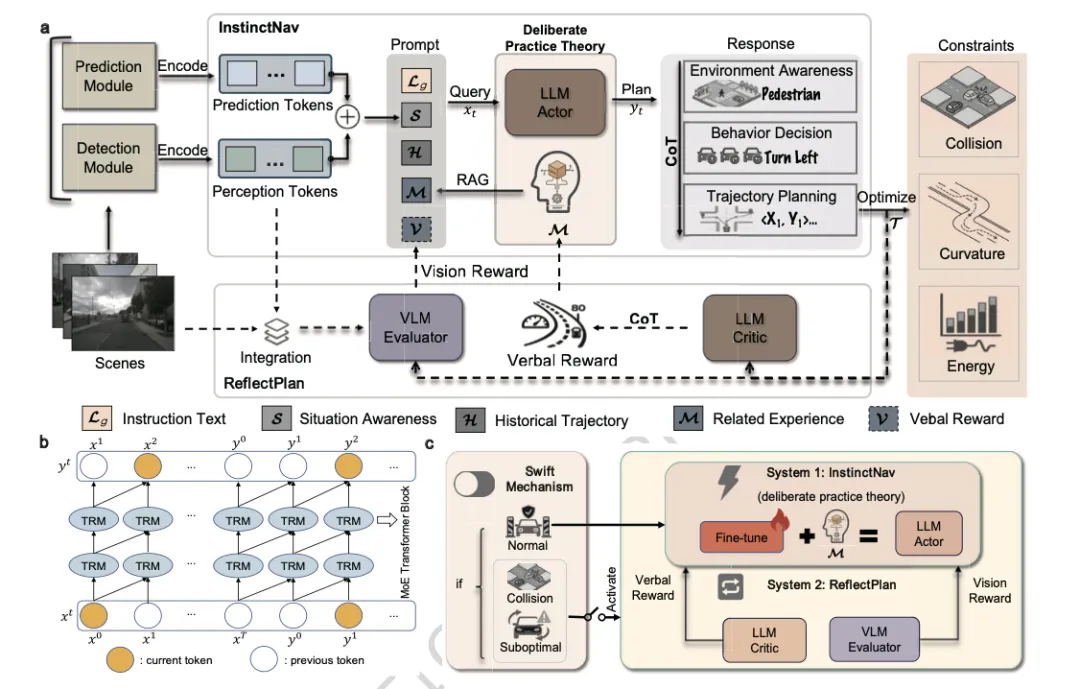
为了透彻理解 CogniDrive 的精妙设计,我们可以引入一个生动的比喻:一支分工明确的现代化作战部队 。
1. 前线快反部队:InstinctNav(直觉导航)
在日常驾驶场景中,InstinctNav 扮演着“快反部队”的角色,以极低的认知成本输出极速决策 。系统为大模型植入了“思维模型(Thought Model)”,强制其按照“态势感知 行为决策 轨迹规划”的链条(CoT)进行直觉推理 。
其核心推演公式为:
行动计划(目标 、动作、轨迹)由大模型结合指令、态势、历史轨迹以及战术手册 迅速生成 。
2. 后方参谋部:ReflectPlan(反思规划)
当系统预测到碰撞风险或遭遇复杂场景时,会瞬间激活“后方参谋部” 。这套慢速分析系统不再追求盲目响应,而是引入了强大的审视闭环 。参谋部内有两大核心角色:
战术指导员(LLM Critic):审视快反部队的初步方案,用自然语言输出对安全、舒适度与能效等维度的反思与纠偏 。
情报分析师(VLM Evaluator):直接“看”懂原始多视角画面(),通过深度语义理解对环境危险源(如侧翻卡车)发出文字警报,弥补传统感知模块的遗漏 。
参谋部会将指导员的“语言奖励(Verbal Reward)”与分析师的“视觉奖励(Vision Reward)”进行融合:
最终,参谋部带着高浓度的多模态反思信息,强制大模型进行复盘与重新规划:
通过“快反部队+后方参谋”的协同作战,极端长尾场景下的驾驶危机迎刃而解












 10个月宝宝每天需要喝多少奶粉?
10个月宝宝每天需要喝多少奶粉?
