






随机文章
-
 10个月宝宝每天需要喝多少奶粉?
10个月宝宝每天需要喝多少奶粉?
- 14.98万起!五菱华为联手造6座SUV,255km纯电续航,全家出行无压力
- 25万预算想买豪华中型SUV?XT5这口“安全饭”,你到底愿不愿意吃
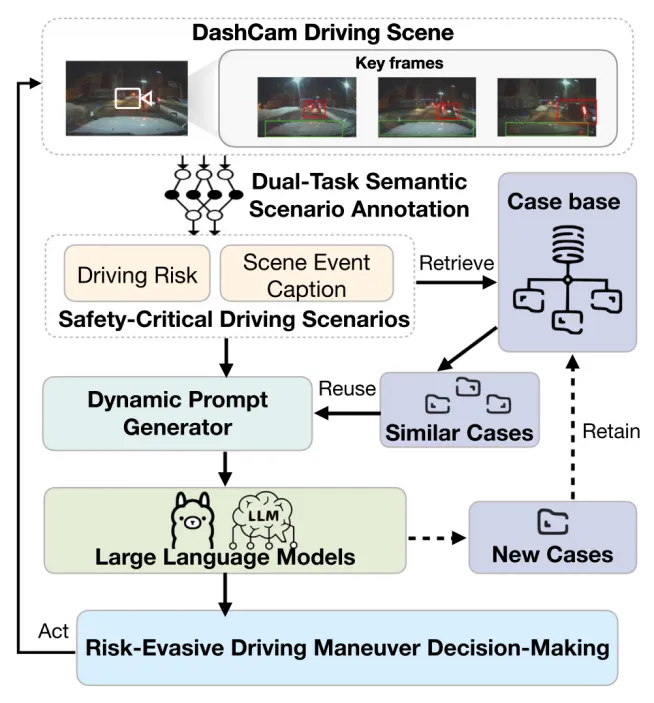
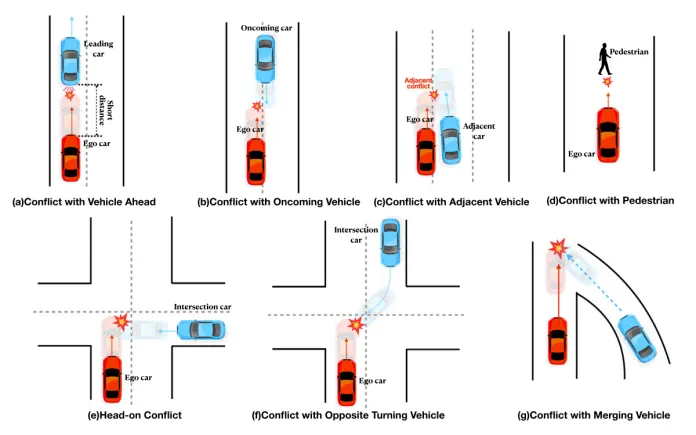
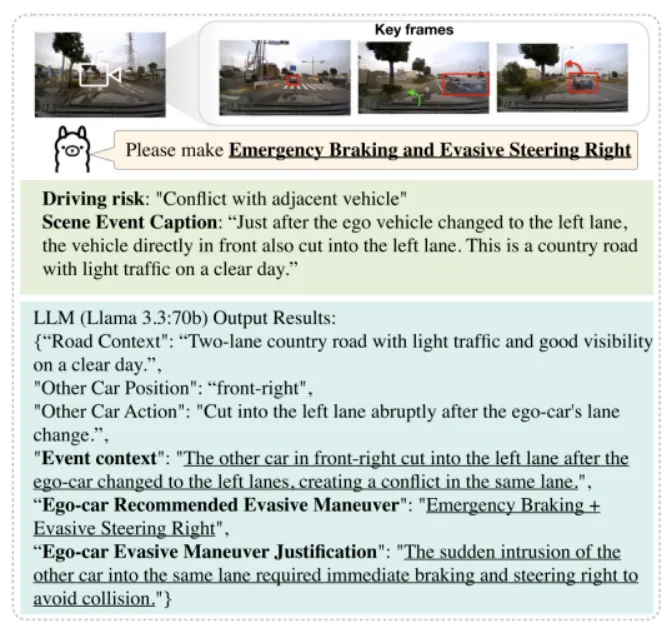
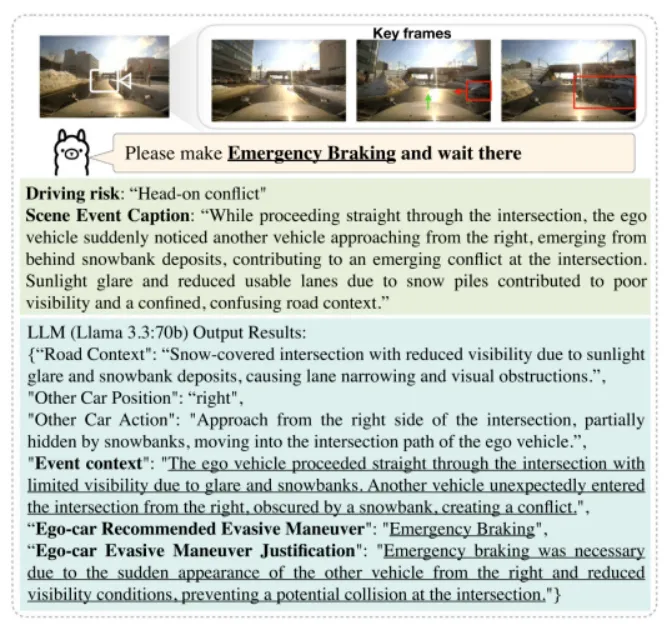
- 自动驾驶简介
- 国产SUV放大招!小鹏MONAL05比ModelY大一圈,纯电增程双版本,价格还便宜10万!
- 科技驾控旗舰SUV——腾势N9闪充版上市 !
- 谷饶一轿车直接停路中间?交警出手了!
- 本田CRV看着不新鲜了,但家用SUV这笔账还真不能只看热闹
- 2027款现代帕里斯帝先别急着冲,家用SUV最该看的是这些取舍
- 反转!北京SUV恶意别救护车后续出炉,双双被罚!原来没人是无辜的
- 12月份方盒子SUV销量前十名:卖得好不等于都适合你,先把用途想清楚
