香港大学李弘扬教授团队 | 让自动驾驶"看懂"路口:基于图神经网络的驾驶场景拓扑推理
- 2026-06-05 15:15:18
香港大学李弘扬教授团队 | 让自动驾驶"看懂"路口:基于图神经网络的驾驶场景拓扑推理

一辆自动驾驶车开到十字路口,要在几秒钟内回答两个问题——"我该走哪条道?""我该关注哪个红绿灯?"直行路段上,车道线清晰、信号唯一,这类场景并不难;可一旦进了十字路口,地面车道线在中央戛然而止,头顶又同时挂着五六个信号灯与指示牌,决策一下子从几何问题变成了关系问题。其实驾驶员靠的并不是更敏锐的眼睛,而是"看关系":哪条入口道接哪条出口道、哪盏灯管自己这条道。换句话说,路口在人脑海里从来都不是一堆孤立元素,而是一张相互关联的图。 要让车也具备这种能力,业界长期沿两条路走:一条是离线高精地图:把路网拓扑提前标注好,车开过去查表即可;代价是制作和维护成本高昂,城市道路稍有更新便会失效,规模化部署受限。另一条是近年兴起的在线建图:车边开边用相机感知,把车道线、路沿、人行横道实时画出来;但这类方法大多只还原了几何形状,却说不清道路元素之间的关系,比如"这条道接到哪条道",下游规划仍需依赖一整套手写规则做二次加工。 两条路径各有取舍,实用场景里却越来越倾向同一种诉求:感知与拓扑一次性产出,结果可直接交给规划。这正是本文想要回答的问题——把车道、红绿灯、路标共同放入一张异构关系图中端到端地推理,使车辆所"看到"的不再是离散元素的堆叠,而是一张可以直接用于决策的场景图。 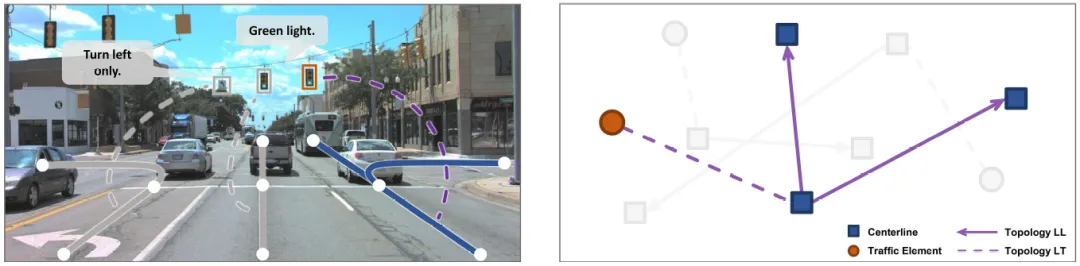
图1 路口的拓扑关系一目了然:实线箭头表示车道之间的连接(Topology LL),虚线表示交通元素到车道的归属(Topology LT)。TopoNet (Topology Reasoning Network)要做的,就是从相机图像里把这张"关系图"直接画出来。(论文 Fig.1) 
论文将所提方法命名为TopoNet (Topology Reasoning Network),是首个端到端、统一处理两类拓扑关系(车道—车道、车道—交通元素)的驾驶场景理解网络。其整体结构并不繁复:一个共享的图像特征提取器,两条并行的检测分支——一条在前视图(PV)中检测红绿灯与路标,一条在鸟瞰图(BEV)中检测车道中心线;真正承担推理职责的,是两条分支之上的场景图神经网络(Scene Graph Neural Network, SGNN)。 这里有一个绕不开的工程难题:交通元素天然存在于 2D 图像中,而车道存在于 3D / BEV 空间中——两套坐标系下的特征如何对话?SGNN 给出的方案是先以一个轻量的 embedding network 将交通元素的语义信息("禁止左转""红灯"等)映射到与车道一致的特征空间,再让两类 instance query 在一张精心设计的有向图上通过 GCN (graph convolutional network) 互相传递消息。 更关键的是文中提出的场景知识图(Scene Knowledge Graph):对每一类交通元素(左转牌、直行牌、红灯、绿灯等)与每一种车道连接方向(前驱 / 自身 / 后继)分别学习独立的权重矩阵,使"红灯传来的消息"与"左转牌传来的消息"在数学层面就被区分对待,避免不同语义的邻居被一视同仁地汇聚。设计上也刻意将消息只在"车道—车道""车道—交通元素"两类边上传播,而不构造完全图——既节省算力,也阻断了两个本就毫不相干的路牌之间的无效串扰。 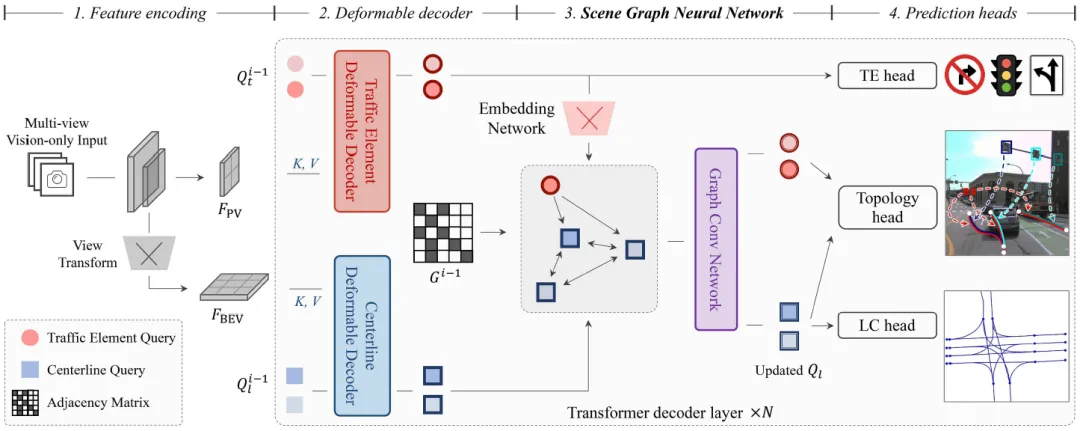
图2 TopoNet 整体Pipeline:多视图图像先变换为 PV 与 BEV 两套特征,两条 deformable decoder 分别输出交通元素与车道中心线的 query,再进入 SGNN 互通有无、迭代精修。图中 "TE" (Traffic Element) 与"LC" (Lane Center)两类节点被区别对待,对应右侧的场景知识图设计。(论文 Fig.2) 场景知识图的工作机制如图 3 所示。以一条目标车道(图中蓝色中心线 LC1)为例,它的"邻居"既包括前驱与后继车道,也包括头顶悬挂的红灯、左转牌等不同类别的交通元素。这些邻居在图结构右侧被显式拆分到类别独立的权重矩阵 W上:红灯走红灯的通道,左转牌走左转牌的通道,前驱与后继车道亦各自独立。SGNN 据此分通道聚合,再求和更新 LC1 的特征——交通先验由此沿着图结构本身、而非通过 loss 函数进入网络。 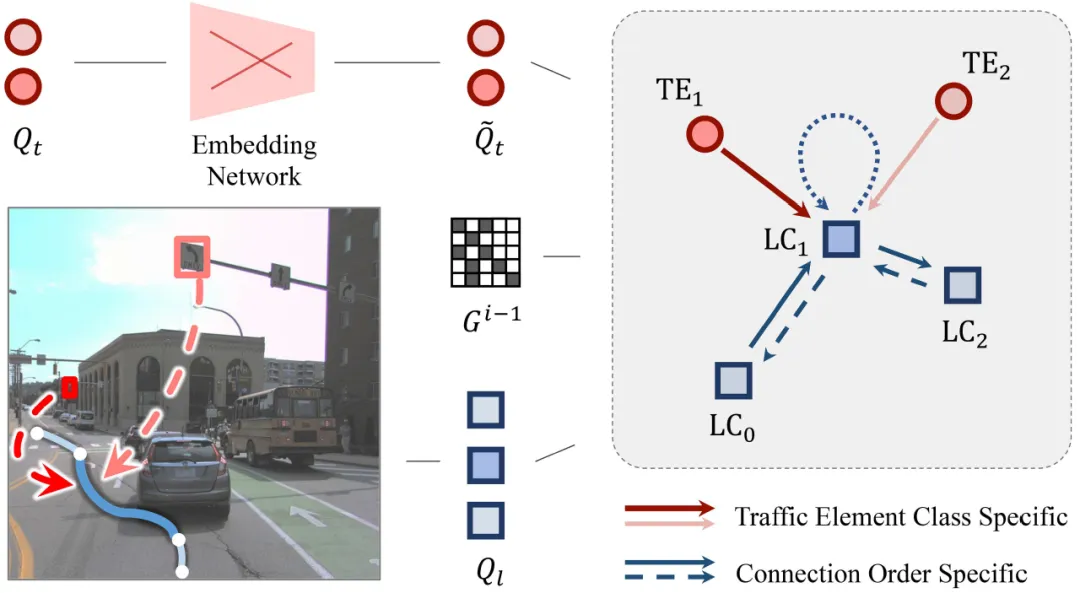
图3 场景知识图工作机制示意。左侧为真实场景中的局部关系(蓝色目标车道 LC1 与其前驱、后继车道及上方多类交通元素的连边);右侧将其展开为类别独立的权重矩阵 W——不同类别的交通元素与不同方向的车道连接各走一组权重,对目标节点的语义贡献因此被区分对待。(论文 Fig.3) 本文的主要贡献可概括为如下三点: (1) 跨视图统一特征空间。通过 embedding network 将 2D 图像域的交通元素语义映射至与车道一致的特征空间,使异构域之间得以先对齐、再交互,规避了跨视图特征的硬性拼接。 (2) 显式建模场景中的两类关系。将"感知"与"拓扑推理"纳入同一个 forward pass,由 SGNN 在网络内部直接产出车道连接与交通元素归属,省去了以往方法所依赖的手写后处理流程。 (3) 类别感知的知识图设计。针对不同类别的交通元素与不同方向的车道连接分别学习独立权重,将交通先验直接编入图结构本身,而非借助 loss 函数间接施加约束。 
实验在OpenLane-V2基准上进行。这是首个同时标注了车道拓扑与交通元素归属关系的大规模数据集,覆盖 Argoverse 2 与 nuScenes 两套场景。对比方法选取了三个有代表性的强基线:STSU(DETR “DEtection TRansformer”风格的中心线 + 拓扑学习)、VectorMapNet (Vectorized HD Map Learning Network) 与 MapTR (Map TRansformer)(彼时在线建图方向的两个 SOTA)。为避免"换了主干偷偷占便宜"的争议,所有方法统一使用 ResNet-50 主干、统一输入分辨率、统一训练 24 epoch。 肉眼对比即可见分晓(论文 Fig.4):在"车道线本就消失"的路口场景下,前几个 baseline 要么漏检大段中心线,要么把连接关系画得拧巴;TopoNet 几乎完整还原了路口内的全部车道连接,并正确建立起红绿灯到车道的归属边。数值上,从感知(DET_l、DET_t)到拓扑(TOP_ll、TOP_lt),再到综合分 OLS,TopoNet在全部指标上稳定领先;尤其在拓扑推理两项上,相对此前最佳方法实现了数倍的相对提升——这正是"会画线"与"懂关系"之间的差距。 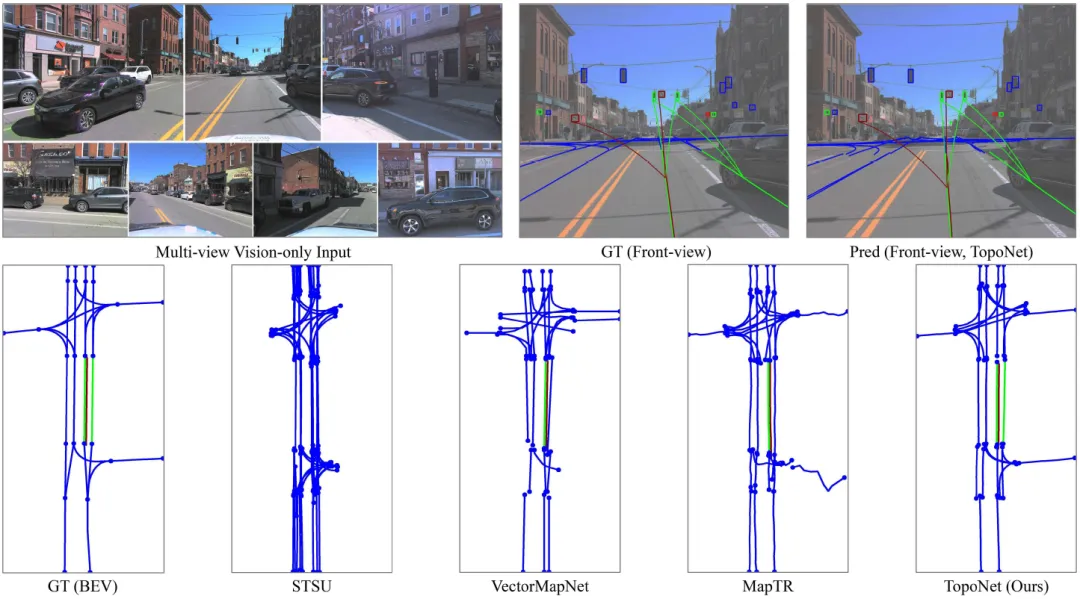
图4 同一十字路口下,几种方法的预测一眼可辨:STSU 漏检了大量路口内中心线,VectorMapNet 与MapTR 的连接关系扭曲、错位;TopoNet 几乎还原了全部车道连接,并正确建立了红绿灯到车道的归属边。不同颜色表示不同类别的交通元素。(论文 Fig.4) 消融实验进一步印证了若干设计的必要性。当场景知识图被退化为普通 GCN 时,拓扑指标反而出现轻微回落——表明对不同类别、不同方向的邻居"一视同仁"在该任务上是无效的,先验语义必须显式编入图结构。作者同时考察了"仅保留车道—车道边"与"仅保留车道—交通元素边"两种变体,二者均逊于完整模型,验证了两类关系彼此互补、缺一不可。 代码与模型已在 GitHub 开源:https://github.com/OpenDriveLab/TopoNet。 该工作自 2023 年公开以来,已被 LaneSegNet、TopoMLP、TopoLogic、TopoPoint、RoadPainter 等一系列后续工作引为基线,成为驾驶场景拓扑推理方向的奠基性方案之一。 
相关阅读 自动驾驶开源数据体系:现状与未来 SCIS专题 | 多模态大模型 (2026) 清华大学朱文武课题组 | 多模态图大语言模型 安徽大学黄大荣,孙长银团队 | 融合不同驾驶风格的自动驾驶车辆轨迹预测框架 北京理工大学辛斌团队 | 基于图神经网络的随机资源分配优化方法 
#自动驾驶,#场景理解,#拓扑推理,#车道感知,#高精地图,#图神经网络,#端到端感知,#人工智能
引用本文: Li T Y, Chen L, Wang H J, et al. Graph-based topology reasoning for driving scenes. Sci China Inf Sci, 2026, 69(5): 152103, https://doi.org/10.1007/s11432-025-4815-9

研究意义
本文工作
实验结果
本文来自网友投稿或网络内容,如有侵犯您的权益请联系我们删除,联系邮箱:wyl860211@qq.com 。

