家人们,最近武汉萝卜快跑的事儿,你们刷到了吗?
3月31号晚上,部分萝卜快跑的车突然在路中间“罢工”停滞,好在没造成人员伤亡,路段很快恢复。但这事儿一出,网上瞬间炸锅:有人骂“技术不行”,有人慌“无人车是不是不安全”?
其实啊,这事儿真没那么简单。今天咱就唠唠:自动驾驶遇到状况,到底是“失误翻车”,还是“自保求生”?
一、“主动降级”不是故障,是行业的“保命策略”
很多人以为车停了就是“坏了”,但在自动驾驶的体系里,这叫“主动降级”——系统在遇到不确定的情况时,会主动选择“先停下来”,把风险压到最低。
举个例子:就像你开车遇到路口突然窜出个小孩,你第一反应肯定是踩刹车甚至停车,而不是硬冲。无人车也是一样,它的底层逻辑是“安全优先”,不确定就停车,这是行业通用的安全策略。
二、不止国内,美国Waymo也干过类似的事儿
而且啊,这种“遇事就停”的操作,不是国内独一份。
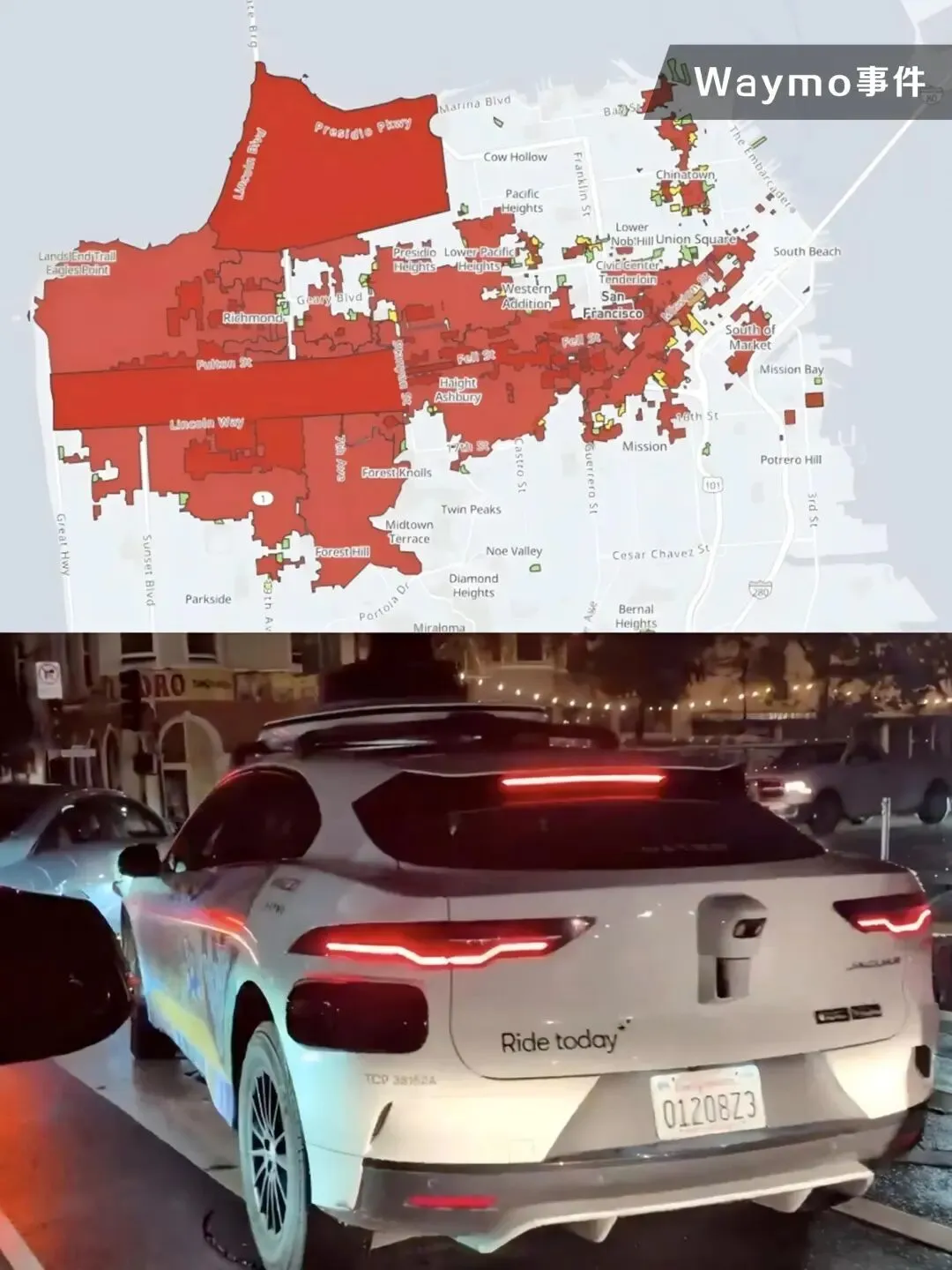
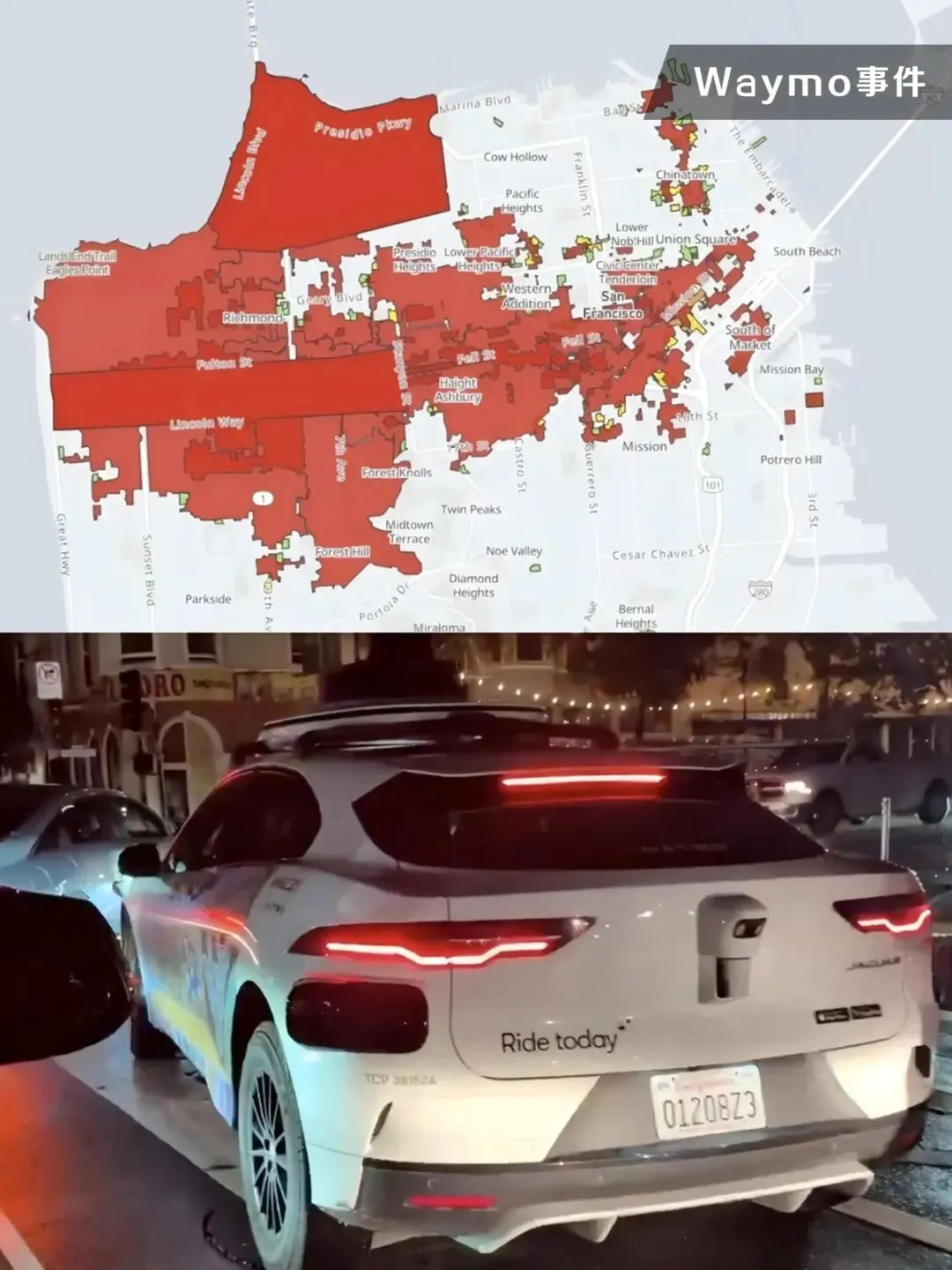
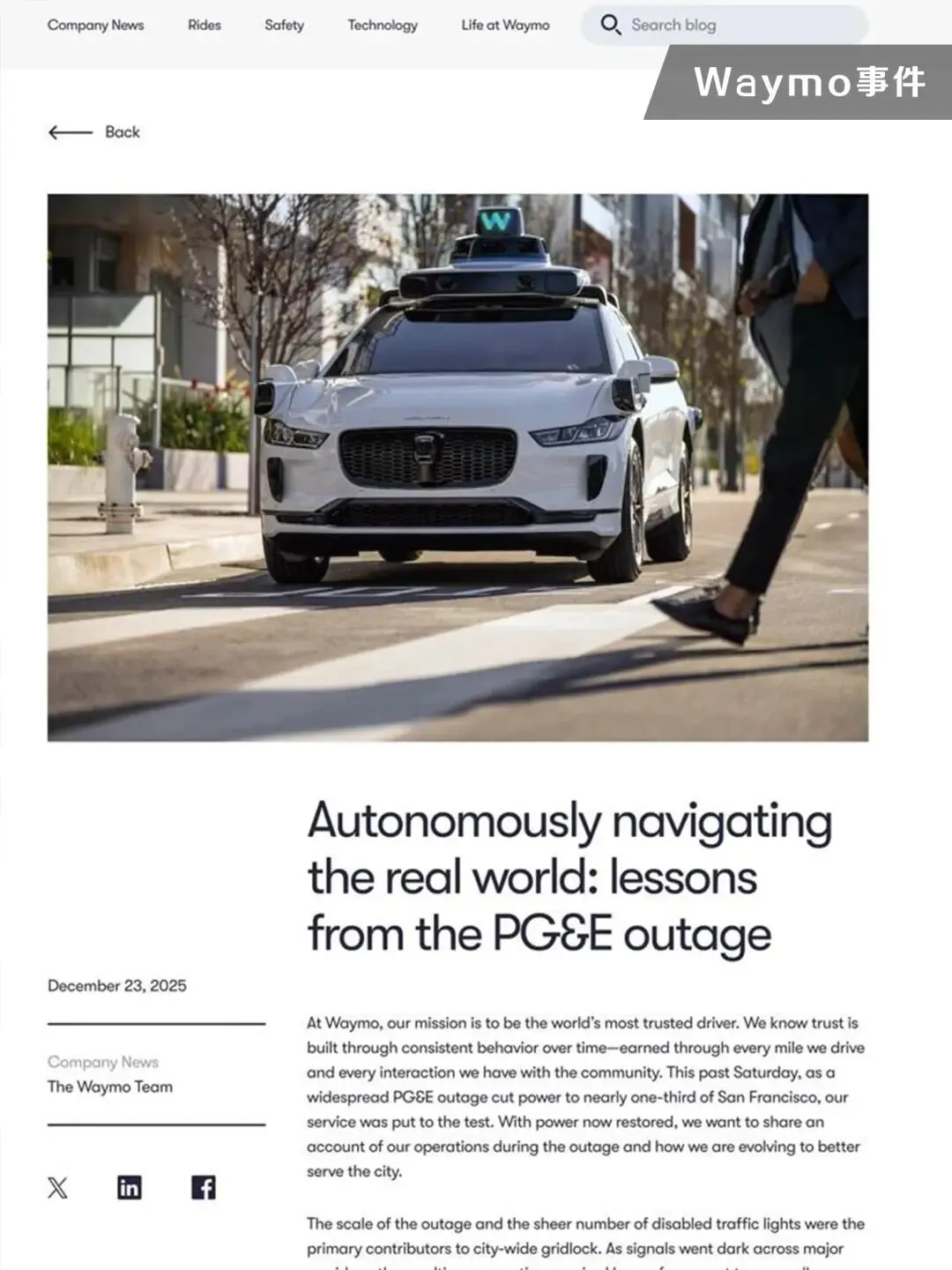
2025年12月(注:原文时间,可理解为之前),美国Waymo在旧金山就遇到过:突发停电导致交通信号失效,部分无人车在十字路口、斑马线附近直接停下,短时间影响了交通,但第二天就恢复正常了。
你看,中美两国的无人车,遇到复杂情况都选择了“保守停车”。这说明啥?说明行业共识很清晰——安全,是写在自动驾驶系统骨子里的。
三、核心问题:自动驾驶的“失误”还是“自保”?
这事儿引出个关键疑问:自动驾驶到底是在“失误”还是“自保”?
中国信息协会的朱克力说得挺明白:这属于“最小风险操作”——系统不确定时,主动选最保守的退出策略。背后是“安全冗余”设计,就像飞机有多重备份一样,无人车的感知、计算、控制环节都有冗余保障,这是L4级自动驾驶的硬性要求。
商业观察家金错刀更直白:“无人车遇到不确定状况,就得先刹车保平安,这是铁律。”
四、别只看单次事件,要看中美“竞速”的大局
但如果把视角拉高,这事儿不只是“萝卜快跑翻车”这么简单。
现在自动驾驶已经进入中美竞速阶段:一边是美国Waymo疯狂铺量,每周几十万单运营数据喂系统;另一边是中国企业在更复杂、更高密度的城市环境里验证,用更难的场景逼系统进化。
说白了,两边都在抢“未来自动驾驶规则的定义权”。类似的“阶段性波动”,中美大概率还会继续经历。
五、我的感受:它至少知道“什么时候该停”
回到这事儿本身,我的感受是:
如果你把它当成“翻车事件”,那确实容易焦虑;但如果你把它看成“系统在关键时刻选择保守”,反而能说明一个问题——它至少知道“什么时候该停”。
当然,这不代表可以放松。用户体验、响应速度、恢复效率这些问题,后续一定会被无限放大。但长期来看,自动驾驶的真正分水岭,可能不是“有没有问题”,而是“出问题的时候,谁更稳、谁更快、谁更敢把安全放第一位”。
最后问问大家:你觉得萝卜快跑这次“罢工”,是技术缺陷还是安全策略?评论区聊聊你的看法!