2026年5月,全球激光雷达龙头企业 RoboSense(速腾聚创)发布的一季度财报,在智能感知产业引发广泛关注。财报显示,公司机器人领域激光雷达销量达到18.55万台,同比增长1458.8%,销量占比由上年同期的11%跃升至56%,首次超过ADAS业务,成为最大的收入来源。
这一标志性事件标志着激光雷达行业完成了关键的商业属性蜕变:它不再仅仅是高阶智能驾驶的可选附加硬件,而是正式升级为支撑整个空间智能时代的核心基础设施。从自动驾驶汽车到人形机器人,从割草机器人到工业自动化设备,激光雷达正在扮演空间智能时代“数字眼睛”的角色,为机器构建对真实世界的精确认知能力。
 YOLE市场调研
YOLE市场调研顾过去十余年的发展历程,激光雷达行业经历了一场深刻的技术迭代与产业重构。早期以 Velodyne 为代表的机械式激光雷达价格高达数万美元甚至数十万美元,仅能应用于科研项目和Robotaxi测试车辆。
随着MEMS、半固态、Flash及OPA等新架构不断成熟,以及中国供应链体系的快速崛起,激光雷达成本持续下降,国产MEMS激光雷达价格已进入数百美元区间。曾经的“奢侈品”逐步成为20万元级智能汽车的标准配置,并开始大规模渗透至机器人和工业自动化领域,推动行业从单一车载市场迈向多场景协同发展的新阶段。
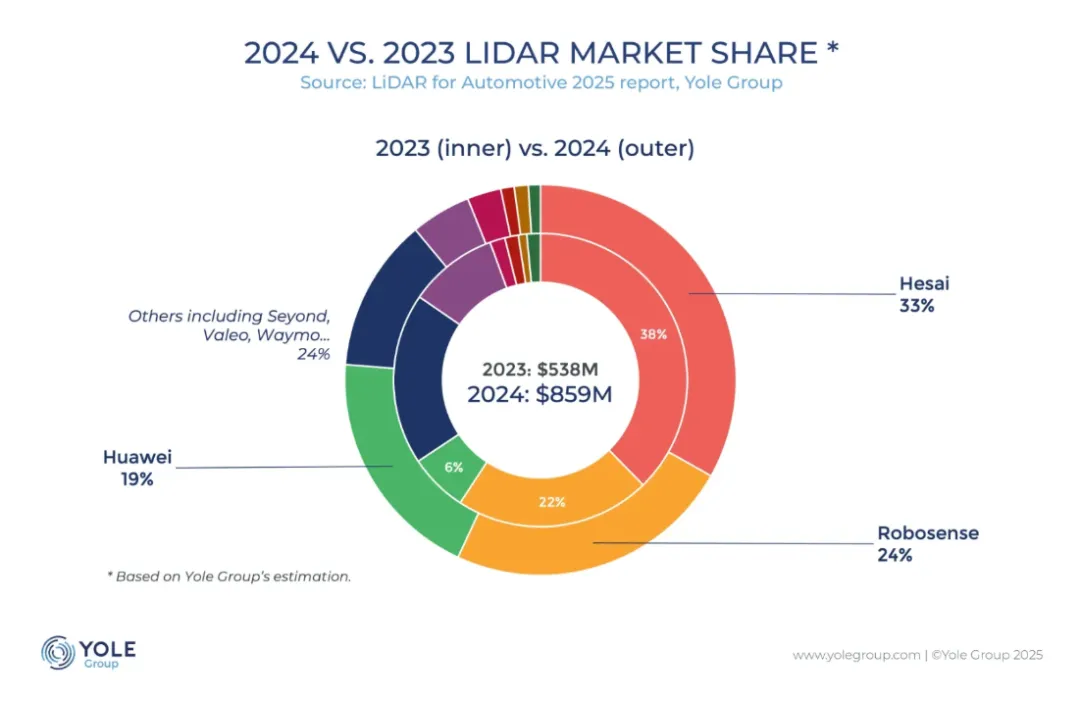
市场规模的扩张同样印证了这一趋势。根据行业机构统计,2020年至2024年全球激光雷达市场保持高速增长,2024年市场规模已达到约512亿元,同比增长接近翻倍。包括 Yole Group 在内的多家研究机构预计,未来5至10年将成为激光雷达产业化爆发的关键窗口期。
全球激光雷达出货量有望从2025年的约660万颗增长至2030年的7934万颗,其中中国市场预计将分别贡献约292万颗和3154万颗,成为全球最大的需求与创新中心
更值得关注的是,在这场全球技术竞赛中,中国企业正逐步掌握产业发展的主动权。凭借供应链优势、工程化能力以及快速迭代的产品开发体系,中国厂商已经在全球汽车激光雷达市场占据主导地位。目前,Hesai Technology、Huawei 和 RoboSense 等企业构成了行业第一梯队,不仅推动激光雷达从“可用”走向“好用”,更在持续降低成本、提升性能和拓展应用边界,加速空间智能时代的到来。放眼全球市场,行业核心参与者已形成多元竞争格局,涵盖欧洲法雷奥(Valeo)、北美Luminar、Ouster,以及亚洲禾赛、速腾聚创、北阳智感(Seyond)、Innoviz等头部企业。同时,产业竞争焦点也迎来关键迁移,逐步脱离单一自动驾驶汽车赛道,全面延伸至服务机器人、具身智能、智能制造等广阔新兴场景。
过去,人们谈论激光雷达时,更多关注的是它能否帮助汽车实现自动驾驶;而今天,随着机器人、工业自动化设备、无人配送车、割草机器人以及低空飞行器等新兴应用快速发展,激光雷达正在走出汽车行业,成为越来越多智能机器感知物理世界的重要入口。
从某种意义上说,这场变革的核心已经不再是“自动驾驶需不需要激光雷达”,而是“未来的智能机器将如何理解真实世界”。而在这一过程中,激光雷达正逐渐从一种专用传感器演变为空间智能时代的基础设施。
激光雷达如何构建三维世界?
激光雷达的下游应用主要分为测绘与导航两大领域。在测绘领域,激光雷达被广泛应用于高精度地图构建、地形测绘、林业调查以及自然资源勘测等场景;在导航领域,则成为自动驾驶汽车、无人机、移动机器人以及工业自动化设备的重要感知传感器。
随着自动驾驶、人形机器人和智能制造的快速发展,环境感知能力正在成为决定智能系统性能上限的关键因素。对于机器而言,无论是自主导航、避障决策,还是目标识别与路径规划,其前提都是能够准确理解周围环境的空间结构。而在众多传感器中,激光雷达凭借直接获取三维空间信息的能力,逐渐成为高等级感知系统的核心组成部分。
与摄像头通过二维图像推断空间信息不同,激光雷达能够直接测量目标距离,因此被认为是目前最成熟、最可靠的主动式三维感知技术之一。简单来说,摄像头更擅长“看清世界”,而激光雷达则更擅长“测量世界”。
用激光测量距离
激光雷达的核心原理是主动测距。
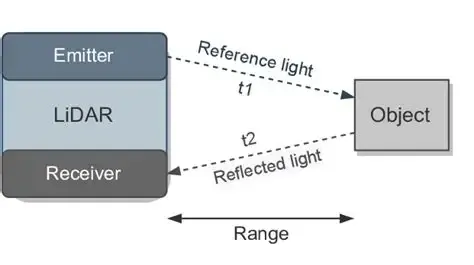
工作过程中,系统首先向外发射激光脉冲。当激光照射到目标表面后发生反射,返回的回波信号被接收器捕获。通过测量激光从发射到返回所经历的时间,即飞行时间(Time of Flight,ToF),便可以计算目标与传感器之间的距离:
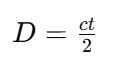
其中,D为目标距离,c为光速,t为激光往返飞行时间。
由于光速高达每秒约30万公里,即使测量100米外的目标,激光往返时间也仅有数百纳秒。因此,激光雷达内部需要极高精度的时钟系统、光电探测器以及信号处理芯片,才能实现厘米级甚至毫米级的测距精度。
从本质上看,激光雷达就像一个不断发射和接收激光信号的“电子测距仪”,通过高速、连续的距离测量来感知周围环境。
 激光雷达工作原理
激光雷达工作原理从单个测距点到三维世界
然而,单次测距只能获得一个方向上的距离信息。
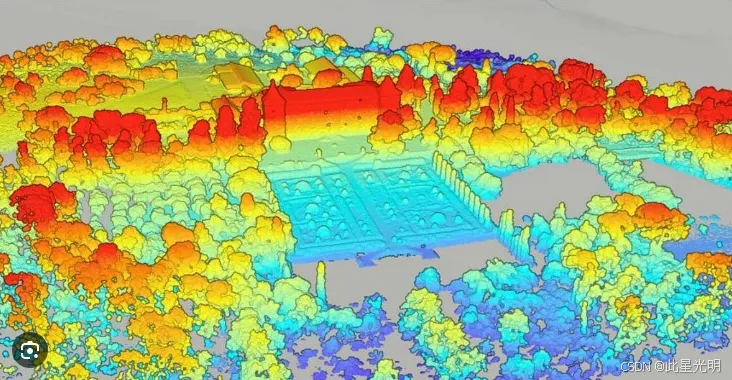
为了构建完整的环境模型,激光雷达需要不断改变激光束的发射方向,对周围空间进行连续扫描。每完成一次测量,系统都会记录对应方向上的距离数据;当数十万甚至数百万个测距点被连续采集后,这些空间坐标便会汇聚成一个由海量离散点构成的三维数据集合——点云(Point Cloud)。
 点云图
点云图点云可以被视为机器眼中的三维世界。
对于人类而言,我们看到的是道路、建筑、树木和行人;而对于激光雷达来说,周围的一切都被表示为大量具有空间坐标的点。通过后续算法处理,系统能够从点云中识别车辆、障碍物、行人甚至复杂场景结构,并进一步完成定位、导航和决策任务。
什么决定激光雷达的性能?
对于激光雷达而言,性能的优劣并不仅仅取决于是否能够测量距离,更重要的是它能否在复杂环境中快速、准确地还原真实世界。
如果把激光雷达比作机器的眼睛,那么评价这双“眼睛”的能力,主要取决于三个维度:看得多远、看得多清、看得多快。
探测距离决定了激光雷达能够在多远的位置发现目标。对于高速行驶的自动驾驶汽车而言,远距离探测能力尤为重要。以时速120公里行驶的车辆为例,如果激光雷达只能探测100米以内的目标,系统留给决策和制动的时间将十分有限;而当探测距离提升至200米甚至300米时,车辆便能够更早识别潜在风险,从而获得更充足的反应时间。
发现目标只是第一步,机器还需要知道目标究竟是什么。
分辨率决定了激光雷达描绘物体轮廓的能力。如果将点云比作一张照片,那么分辨率越高,照片中的细节就越丰富。高分辨率激光雷达能够清晰区分行人与路灯、自行车与摩托车,甚至识别复杂环境中的细微结构;而低分辨率系统则可能只能看到一个模糊的轮廓。
对于人形机器人而言,这项能力尤为关键。机器人不仅需要知道前方存在障碍物,还需要识别桌角、楼梯边缘、门把手等细节,从而完成更加精细的交互动作。
现实世界是动态变化的。车辆在移动,行人在行走,机器人也在不断调整姿态。因此,激光雷达不仅需要看得清,还需要实时更新环境信息。
点云密度越高,系统获取的环境细节越丰富;刷新频率越高,机器对周围环境变化的响应速度就越快。在自动驾驶、高速无人机和工业机器人等场景中,高速更新的点云数据往往意味着更高的安全性和更稳定的控制性能。
除了上述核心指标外,激光雷达的实际性能还受到视场角、抗强光干扰能力、雨雾天气穿透能力以及功耗、尺寸和成本等因素的影响。对于产业界而言,真正的挑战从来不是单纯追求某一项指标的极限,而是在性能、可靠性和成本之间找到最佳平衡点。
事实上,过去十余年激光雷达产业的发展,本质上就是一场围绕“更远、更清、更便宜”的持续竞赛。而机械式、MEMS、Flash以及OPA等不同技术路线的出现,也正是为了回答同一个问题——如何让机器以更低的成本、更高的效率理解真实世界。
激光雷达的技术路线
虽然激光雷达的测距原理相对简单,但要真正构建高精度三维点云,还需要解决一个关键问题——如何让激光束覆盖整个空间。
如果激光始终朝向固定方向发射,系统只能获得单个测距点的信息。为了感知周围环境,激光雷达必须不断改变激光束的方向,对空间进行快速扫描。因此,激光束的扫描方式也成为决定激光雷达性能、成本和可靠性的核心因素。
事实上,激光雷达并非近几年才出现的新技术。早在20世纪60年代,激光雷达便已经诞生,并被广泛应用于气象探测、海洋测绘和地形勘测等领域。1971年,NASA在阿波罗15号任务中搭载了激光测距系统,用于绘制月球表面地形,这也是激光雷达技术早期应用的重要里程碑。
随着激光器、探测器以及半导体技术的发展,激光雷达逐渐从科研设备走向产业应用。进入2010年代后,自动驾驶技术兴起,激光雷达开始进入汽车行业,并迅速成为高阶智能驾驶的重要感知传感器。到2020年前后,激光雷达已经成为众多高端智能汽车的标志性配置。
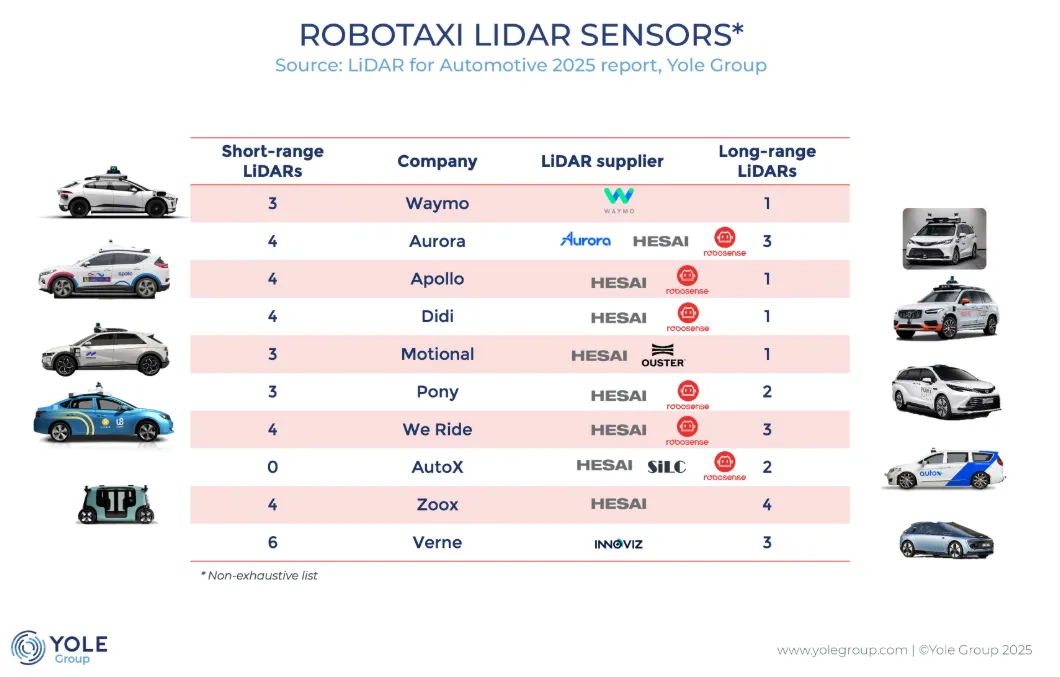 Robotaxi Lidar Sensors
Robotaxi Lidar Sensors在车载应用中,激光雷达通常承担两类任务:一类是负责前方远距离探测的主激光雷达,用于识别远处车辆、行人及道路障碍物;另一类是负责侧向和近距离感知的辅助激光雷达,用于覆盖车辆周围环境。二者协同工作,共同构建车辆周围360°的三维感知能力,从而最大程度消除视觉盲区。
ToF与FMCW:两种不同的测距思路
在讨论扫描方式之前,还需要了解激光雷达的另一种分类维度——测距方式。
目前主流激光雷达主要采用**飞行时间(Time of Flight,ToF)和频率调制连续波(Frequency Modulated Continuous Wave,FMCW)**两种技术路线。
ToF是目前产业界应用最广泛的方案。其原理相对简单:系统发射激光脉冲,通过测量激光从发射到返回所经历的时间计算目标距离。由于技术成熟、结构相对简单且成本较低,目前绝大多数车载激光雷达产品均采用ToF方案。
相比之下,FMCW则采用连续发射频率不断变化的激光信号,并通过接收回波与发射信号之间的频率差来计算目标距离。同时,由于多普勒效应的存在,FMCW还能够直接获取目标运动速度信息。
从理论上看,FMCW具有更强的抗干扰能力、更高的探测灵敏度以及速度测量能力,因此被认为是下一代激光雷达的重要发展方向。然而受限于激光器、光学器件以及信号处理芯片等技术挑战,目前FMCW仍处于产业化早期阶段,市场规模远小于ToF方案。
从机械式到全固态:扫描技术的进化
如果说ToF和FMCW解决的是“如何测距”的问题,那么扫描技术解决的则是“如何看见整个世界”的问题。
根据扫描方式的不同,目前商业化车载激光雷达主要可分为三大类别:机械式激光雷达(Mechanical LiDAR)、半固态激光雷达(Hybrid Solid-State LiDAR)以及全固态激光雷达(All-Solid-State LiDAR)。
机械式激光雷达
机械式激光雷达是最早实现商业化应用的方案。
其工作原理相对直接:通过电机驱动激光器、接收器或光学镜组进行机械旋转,从而实现360°环境扫描。早期Velodyne推出的HDL-64E便是这一路线的代表产品,也是Google自动驾驶测试车顶部“旋转激光桶”的原型。
 HDL-64E 由Velodyne推出
HDL-64E 由Velodyne推出机械式激光雷达最大的优势在于视场角大、点云质量高、探测距离远。在自动驾驶发展的早期阶段,其高精度三维感知能力几乎没有替代方案。
然而,这种架构也存在天然缺陷。复杂的机械结构带来了较高的成本、体积和功耗,同时长期高速旋转还会影响系统可靠性。早期产品售价甚至高达数万美元,难以满足大规模商业化需求。
随着智能汽车开始进入量产阶段,更低成本、更高可靠性的方案逐渐成为行业发展的重点。
半固态激光雷达:当前市场的主流方案
为了减少机械运动部件,同时保留较高的探测性能,行业开始向半固态架构演进。
所谓半固态,并非完全取消机械结构,而是仅保留微振镜或转镜等小型扫描部件,激光器和接收器则保持固定。相比机械式方案,其运动部件更少,体积更小,可靠性也显著提升。
目前市场主流的车载激光雷达大多属于这一类别。
其中最具代表性的技术是MEMS(Micro-Electro-Mechanical System)微机电振镜方案。MEMS利用微米级反射镜高速摆动控制激光束方向,实现环境扫描。由于振镜质量极轻,可以在极高频率下工作,同时保持较高角分辨率。
除了MEMS之外,转镜(Polygon Mirror)方案同样被广泛应用。该方案利用高速旋转反射镜完成扫描,在探测距离方面具有一定优势,因此仍然活跃于Robotaxi和高阶自动驾驶领域。
从产业化角度来看,半固态路线已经成为当前车载激光雷达市场的主流选择。速腾聚创、禾赛科技等头部厂商的大部分量产产品均采用类似架构。
全固态激光雷达
 禾赛纯固态激光雷达
禾赛纯固态激光雷达如果说半固态方案减少了机械结构,那么全固态激光雷达则试图彻底消除所有运动部件。
在全固态架构中,激光束的偏转不再依赖机械运动,而是通过电子方式实现控制。这意味着系统能够获得更高可靠性、更小尺寸以及更低制造成本,因此被广泛视为激光雷达未来的发展方向。
目前具有商业化潜力的全固态方案主要包括:
- 基于 VCSEL(垂直腔面发射激光器) 与散焦透镜(Defocus Lens)结合的 Flash 泛光照明方案;
基于VCSEL与散焦透镜组合的Flash方案,是目前最早实现商用的全固态路线之一。
其工作方式类似于“泛光照明”:系统一次性照亮整个视场范围,并由面阵探测器同步接收回波信号,从而快速重建三维信息。
由于激光能量在整个视场内均匀分布,单位方向上的有效能量密度较低,这直接限制了其探测距离。因此,该类方案更适用于短距离、高频率感知场景,例如消费电子设备、机器人近距离避障以及车内舱内监测等应用。
从产业角度看,Flash路线更像是全固态技术的“入口形态”,已经完成基础验证,但在车载中远距离市场中仍存在明显性能边界。
- 基于 一维(1D)或二维(2D)可寻址VCSEL阵列(Addressable VCSEL Array) 与散焦透镜结合的扫描方案;
相比Flash的“全视场同时照明”,一维(1D)与二维(2D)可寻址VCSEL阵列采用的是“分区控制 + 选择性照明”的思路。
1D方案可以理解为由多个独立控制的发光条带组成,通过逐行点亮实现空间扫描;而2D方案则进一步扩展为矩阵结构,每一个发光单元均可独立控制,从而实现更灵活的空间光场调制能力。
这种架构的核心优势在于:在保持无机械运动的同时,提高激光利用效率,使得能量能够集中作用于目标区域,从而显著提升有效探测距离。
从产业进展来看,可寻址VCSEL阵列正在成为当前最接近规模化量产的全固态技术路线,已经开始进入部分中短距应用场景验证阶段,并被认为是未来最具商业确定性的方向之一。
但需要注意的是,2D阵列在金属互连、驱动复杂度以及工艺良率方面仍然存在挑战,这也使得其在成本控制上仍未完全成熟。
- 基于 VCSEL/EEL(边缘发射激光器)+ 液晶超表面(LCM) 的电子扫描方案,例如 Lumotive 采用的技术路线;
另一类方案是基于VCSEL或EEL(边缘发射激光器)结合液晶超表面的电子扫描技术。
其核心思路是通过电控方式改变材料的光学特性,实现对光束传播方向的调制,从而替代传统机械扫描结构。
该路线的优势在于结构高度集成、理论上具备较强的可扩展性,但其性能稳定性、响应速度以及量产一致性仍处于早期探索阶段,目前尚未形成成熟的大规模商业应用。
- 基于 FMCW(频率调制连续波)+ OPA(光学相控阵) 的激光雷达方案,代表企业包括 Quanergy、Aeva、LightIC 和 Scantinel Photonics 等。
OPA结合FMCW被认为是最具前瞻性的全固态路线之一。
其核心思想类似于相控阵雷达,通过调节光波相位差来实现光束偏转,从而完全摆脱机械结构,实现真正意义上的“芯片级激光雷达”。
理论上,这一路线具备尺寸最小、集成度最高以及潜在成本最低的优势,因此长期以来被视为激光雷达的“终极形态”。
然而,受限于相干光控制难度、光功率损耗以及芯片制造工艺复杂度,目前OPA相关方案仍主要停留在原型验证与小规模试产阶段,距离大规模量产仍存在较长产业化路径。
目前,除可寻址VCSEL阵列方案外,大多数全固态技术仍处于产业化早期阶段,尚未实现大规模量产。而基于VCSEL阵列的全固态激光雷达正逐步进入规模化生产阶段。
激光雷达由哪些核心器件组成?
从外观上看,激光雷达只是一个安装在汽车、机器人或无人机上的小型传感器。但在内部,它实际上是一套融合光学、电子学、半导体和算法技术的复杂系统。
无论采用机械式、MEMS还是全固态方案,绝大多数激光雷达都可以拆解为四大核心模块:发射模块、接收模块、扫描模块以及信号处理模块。这四部分共同构成了激光雷达感知世界的完整链路。
简单来说,激光雷达的工作流程可以概括为:
发射激光 → 激光照射目标 → 接收回波 → 计算距离 → 生成点云。
而每一个环节背后,都对应着一套关键器件体系。
激光器
激光器(Laser)是整个系统的起点,其作用是产生高能量、方向性极强的激光束。
目前车载激光雷达主要采用905 nm和1550 nm两种波长路线。
905 nm激光器技术成熟、成本较低,并能够复用消费电子和通信产业链,因此成为当前车载激光雷达市场的主流选择。包括禾赛、速腾聚创以及华为的大部分量产产品均采用这一技术路线。
相比之下,1550 nm激光器具备更高的人眼安全功率上限,可以实现更远的探测距离,因此受到部分高性能自动驾驶企业的青睐。然而,其激光器和探测器成本较高,目前尚未形成大规模应用。
光学系统
激光发射后,还需要通过一系列光学元件进行整形和控制。
这些元件包括透镜、棱镜、滤光片以及反射镜等,其作用类似于照相机中的镜头系统。
在发射端,光学系统负责将激光束整形成特定角度并投射到目标区域;在接收端,则负责收集回波信号并过滤环境光干扰。
光学系统设计水平直接影响激光利用效率、探测距离以及抗干扰能力,也是各家厂商的重要技术壁垒之一。
探测器
如果说激光器负责“照亮世界”,那么探测器(Detector)则负责“看见世界”。
其任务是在极短时间内捕获微弱的回波信号,并将光信号转换为电信号。
目前主流技术包括PIN光电二极管、APD(Avalanche Photodiode,雪崩光电二极管)以及SPAD(Single Photon Avalanche Diode,单光子雪崩二极管)。
其中,SPAD被认为是近年来最重要的发展方向之一。
由于能够探测单个光子信号,SPAD具有极高灵敏度,在远距离探测、弱光环境以及全固态激光雷达中展现出巨大潜力。
扫描器件
激光器负责发光,探测器负责接收,而扫描器件则负责让激光束覆盖整个空间。
不同扫描方式构成了前文提到的不同技术路线。
机械式激光雷达依靠电机驱动整个系统旋转;MEMS方案利用微振镜控制光束方向;转镜方案通过高速反射镜完成扫描;而Flash和OPA等全固态方案则试图彻底取消机械运动结构。
扫描器件直接影响视场角、角分辨率、可靠性以及成本,因此成为激光雷达产业竞争最激烈的技术环节之一。
芯片与算法
完成激光发射和回波接收后,系统还需要对海量数据进行实时处理。
这部分工作主要由激光雷达内部的模拟前端芯片(AFE)、数字信号处理器(DSP)、FPGA以及专用SoC完成。
芯片负责完成信号放大、噪声过滤、时间测量和距离计算等工作,而算法则进一步完成点云生成、目标识别和环境建模。
如以RoboSense速腾聚创为代表的激光雷达品牌,正在最新产品设计中应用了SPAD-SoC芯片。其认为,通过将VCSEL与SPAD-SoC芯片组合,激光雷达将实现最远测距和最高分辨率,突破性能天花板。
随着智能驾驶和机器人对感知能力要求不断提升,软件与算法的重要性正在快速增加。如今行业竞争已经不再局限于硬件参数,而逐渐转向“硬件+算法”的综合能力竞争。
激光雷达正在向什么方向发展?
尽管激光雷达已经实现大规模商业化,但距离成为真正普及的通用感知基础设施仍有很长的路要走。无论是智能汽车、人形机器人还是工业自动化设备,对激光雷达都提出了更高的性能要求。因此,当前行业的技术创新几乎都围绕几个核心目标展开。
首先是更高的功率密度(Power Density)。
探测距离始终是衡量激光雷达性能的重要指标。尤其是在高速自动驾驶和低空飞行器等场景中,系统需要在数百米外提前发现目标。因此,提高单位体积内的激光输出能力,成为激光器发展的重要方向。在满足人眼安全标准的前提下,实现更高功率密度意味着更远的探测距离和更强的环境适应能力。
其次是更高的光电转换效率(Power Conversion Efficiency,PCE)。
激光器本质上是将电能转换为光能的过程。较低的转换效率不仅会增加系统功耗,还会产生大量热量,进而影响设备寿命和稳定性。对于汽车和机器人而言,有限的电池容量要求传感器尽可能降低能耗。因此,提高PCE已经成为激光器和探测器设计的重要目标。
第三是更优异的束流质量(Beam Quality)。
束流质量决定激光束在远距离传播后的发散程度。束流越集中,激光能量损失越小,系统获得的点云分辨率和测距精度也越高。尤其是在远距离探测和高分辨率成像场景中,优异的束流质量能够显著提升目标识别能力。
第四是更高的可靠性与稳定性(Reliability)。
汽车和机器人往往需要在高温、低温、振动、雨雪和灰尘等复杂环境下长期运行。对于车规级产品而言,使用寿命通常要求达到数万小时甚至十年以上。因此,减少机械运动部件、提升器件耐久性以及增强环境适应能力,成为激光雷达技术发展的重要方向。这也是行业持续从机械式向半固态、再向全固态演进的根本原因。
最后,也是最重要的一点——成本下降(Cost Efficiency)。
从产业发展的历史来看,没有任何一种传感器能够在高成本条件下实现大规模普及。激光雷达同样如此。过去十年间,激光雷达价格已经从数万美元下降至数百美元,而未来能否进一步进入消费级机器人、无人机甚至智能终端市场,很大程度上取决于成本能否继续下降。
为什么机器人越来越依赖激光雷达?
 robosense官网截图
robosense官网截图从二维视觉到三维空间理解
目前大多数人工智能模型都建立在图像和视频数据之上。
摄像头能够提供丰富的颜色、纹理和语义信息,因此非常适合目标识别、场景分类等任务。但对于机器人来说,仅仅知道前方是一张桌子远远不够,它还需要知道桌子距离自己多远、桌面的高度是多少、周围是否存在障碍物,以及自己能否安全通过。
换句话说,机器人需要的不只是视觉能力,更是空间理解能力。
而激光雷达最大的优势恰恰在于能够直接获取高精度三维空间信息。通过实时生成点云地图,机器人能够准确感知周围环境的几何结构,从而建立对物理世界的空间认知。
从某种意义上说,摄像头让机器人知道“这是什么”,而激光雷达让机器人知道“它在哪里”。
机器人面对的是开放世界
自动驾驶汽车虽然环境复杂,但其运行空间受到道路、交通规则和高精地图的约束。
机器人则完全不同。
无论是家庭服务机器人、人形机器人还是仓储物流机器人,它们面对的都是高度开放且动态变化的环境。
家具可能被移动,门可能突然打开,行人可能随时经过,地面也可能存在台阶、坡道或杂物。对于机器人而言,每一次行动都需要实时感知和重建周围环境。
这也是为什么机器人领域对SLAM(同步定位与地图构建)技术高度依赖。
在SLAM系统中,激光雷达能够提供稳定且精确的空间特征,即使在光线昏暗、纹理稀缺甚至完全黑暗的环境下,仍然能够完成定位和建图任务。因此,多年来激光雷达一直是移动机器人导航系统中的核心传感器之一。
人形机器人需要“立体感知”
随着人形机器人产业快速发展,感知需求正在进一步升级。
与扫地机器人或AGV不同,人形机器人需要完成抓取、搬运、开门、上下楼梯等复杂动作。这意味着机器人不仅要理解环境,还需要理解自身与环境之间的关系。
例如,当机器人伸手抓取一个水杯时,它需要精确判断:
这些任务本质上都依赖于高精度三维感知能力。
虽然纯视觉方案近年来发展迅速,但在复杂光照、遮挡以及动态环境下,视觉系统仍然存在不确定性。而激光雷达提供的真实深度信息能够有效弥补这一短板,因此越来越多的人形机器人企业开始将激光雷达纳入感知系统。
成本下降打开机器人市场
机器人市场的爆发不仅来自需求增长,也来自成本下降。
十年前,一台64线机械式激光雷达售价高达数万美元,远远超出机器人产品的成本承受能力。随着MEMS、Flash和固态化技术不断成熟,以及中国供应链的大规模量产,激光雷达价格已经下降了一个数量级以上。
对于服务机器人、割草机器人、配送机器人等产品而言,激光雷达正在从高端配置逐渐变成标准配置。
这种成本拐点与需求拐点的叠加,推动机器人市场成为激光雷达增长最快的新兴领域。
从自动驾驶传感器到空间智能基础设施
2026年速腾聚创机器人业务首次超过ADAS业务,并非偶然事件。
它反映的是整个产业逻辑的变化:激光雷达的价值不再局限于自动驾驶,而是在向更广泛的空间智能领域扩展。
未来,无论是人形机器人、工业机器人、无人配送车、割草机器人还是低空飞行器,都需要实时感知并理解周围环境。而激光雷达所提供的高精度三维信息,正是机器建立空间认知能力的重要基础。
如果说摄像头定义了智能手机时代的信息入口,那么激光雷达正在成为空间智能时代的重要感知入口。随着机器人产业进入规模化发展阶段,激光雷达的角色也正在从一枚车载传感器,逐渐演变为下一代智能机器的基础设施。
因为真正重要的,从来不是激光雷达本身。
而是机器如何看见世界,又如何理解世界。
参考:
- Automotive LiDAR 2025 https://www.yolegroup.com/product/report/automotive-lidar-2025/
- https://www.robosense.cn/news-show-1894
- https://www.hesaitech.com/cn/news/1286
- Liang, D., Zhang, C., Zhang, P. et al. Evolution of laser technology for automotive LiDAR, an industrial viewpoint. Nat Commun15, 7660 (2024). https://doi.org/10.1038/s41467-024-51975-6
如果您关注前沿科技产业的发展趋势,欢迎关注我们。
我们将持续追踪全球科技产业动态,深度解析核心技术原理、产业链格局与商业化进展,分享机器人、人工智能、先进制造、新能源等领域的最新洞察,与您一起见证智能时代的到来。
 10个月宝宝每天需要喝多少奶粉?
10个月宝宝每天需要喝多少奶粉?
