一、 引子:乱穿马路的行人,是无人车的终极噩梦
通过前两期的特训,我们的无人车已经成了马路上的“模范生”:不仅会看高德导航,还能在红绿灯面前优雅地驻车等灯。
但是,真实的马路远比红绿灯复杂一百倍。最让自动驾驶工程师头疼的,永远是不按套路出牌的动态行人。
孩子们,想象一下:当你的无人车正在大马路上欢快地奔驰,突然,绿化带里窜出一个正在低头玩手机的行人!红绿灯没变,导航也没出错,这时候无人车该怎么办?
今天,有趣爸带大家完成自动驾驶特训营的终极收官之战——为无人车装上“隐形激光雷达”,并手搓一套“随机路人系统”,硬核破解突发安全避险!
二、 角色大兵布阵:所有代码全景说明
为了让整个自动驾驶系统完美闭环,今天我们邀请了新朋友【行人】与【行人雷达】入场,并对主战车【自动汽车】进行了终极代码升级。请大家拿出自己的项目,对照下方全景说明进行调整:
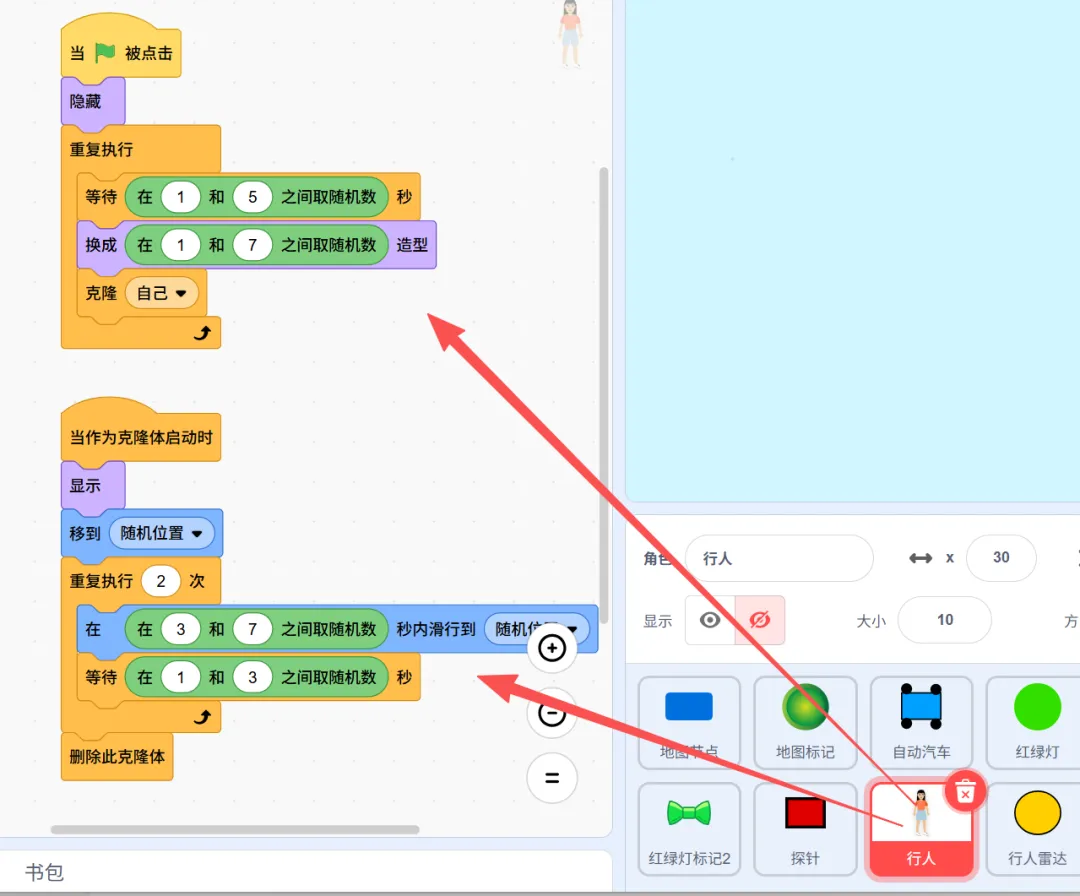
1. 【行人】 ── 会随机逛街、停步的“真实路人” (新朋友加入)
如果行人只会傻傻地走直线,那根本算不上智能驾驶。为了模拟真实的马路不确定性,我们用代码赋予了行人“自主意识”:
控制逻辑: 绿旗按下时,本体先 隐藏。后台开启一个死循环,每隔 1 到 5 之间的随机数 秒,就随机切换一个皮肤造型,并 克隆 [自己]。
行为算法: 克隆体诞生后立刻 显示,并飞到舞台的 随机位置(image_76632d.png)。接着,它会触发一个执行 2 次的循环:在 3 到 7 之间的随机数 秒内,随机滑行到舞台的任意角落;滑到地方后,还要在原地发呆(等待) 1 到 3 之间的随机数 秒。逛完两处街后,克隆体自动 删除此克隆体 瞬间消失。
生活直觉: 这种双重随机数嵌套,完美模拟了现实中路人过马路时“走走停停、不知何时出现、不知何时离去”的复杂行为!
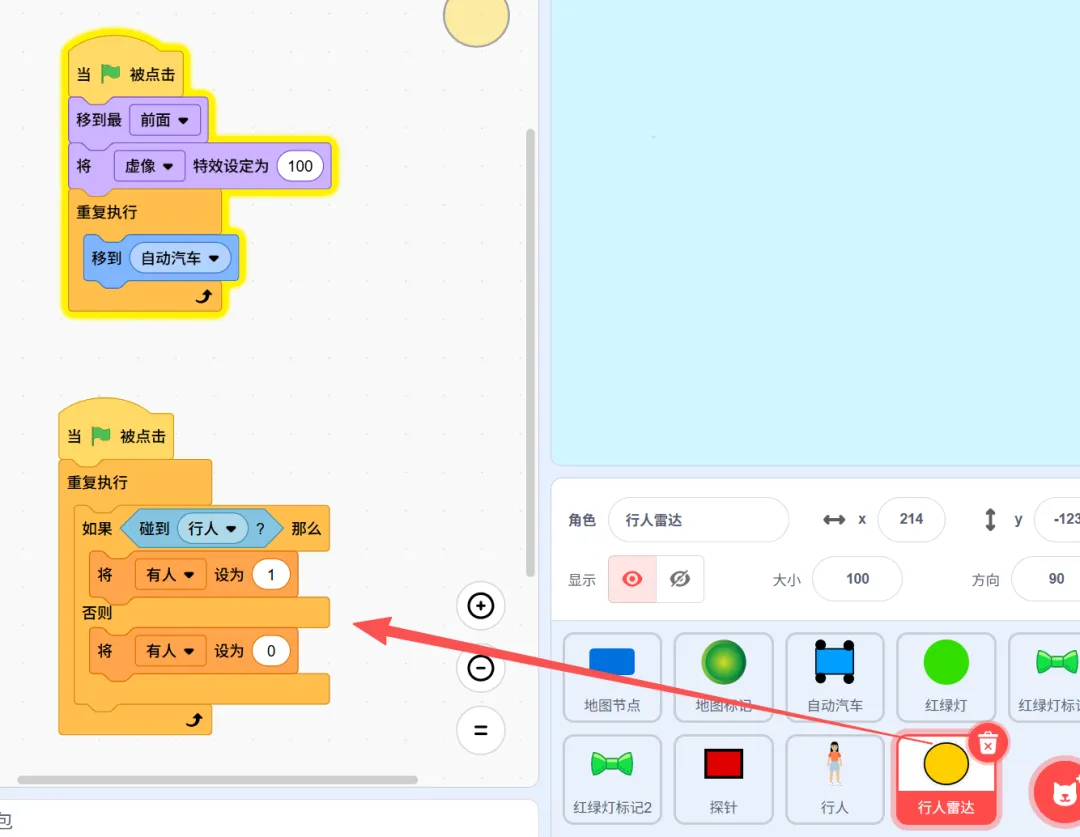
2. 【行人雷达】 ── 默默黏在车身的“隐形金钟罩” (新朋友加入)
现实中的无人车顶,都会装一个每秒旋转几十圈的激光雷达(LiDAR)。在程序里,我们手搓了一个圆形的 行人雷达 角色:
视觉跟随与隐形: 绿旗按下后,它首先执行 移到最 [前面],并把 [虚像] 特效设定为 100。这行代码非常高妙——它虽然在舞台上彻底隐形了,但它的物理碰撞体依然存在!接着,它死死地 移到 [自动汽车],变成了小车一个无形的“安全防护罩”。
二进制思想账本: 隐形雷达在后台疯狂扫射,一旦 碰到 [行人],就立刻往全局记事本写下 将 [有人] 设为 1(危险警报!);否则,就 将 [有人] 设为 0(安全)。用 0 和 1 来代表安全与危险,这是最纯正的计算机二进制控制思维!
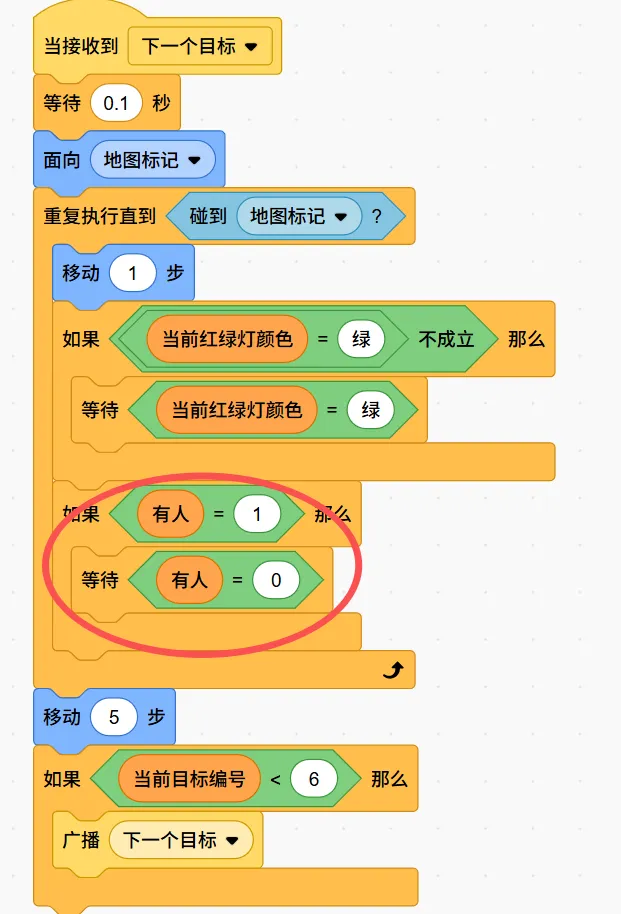
3. 【自动汽车】 ── 规避所有风险的“终极老司机” (老朋友终极升级)
现在,我们的主战车手里同时握着两份账本了:一份是上一期的红绿灯状态,一份是这一期的雷达警报。我们来看看它是如何完美处理多重危机嵌套的:
4. 【自动汽车】 ──零交通事故?
三、 思维升华:从“车头探针”到“车身雷达”的工业演进
细心的孩子一定会问有趣爸:“有趣爸,上一期我们判断红绿灯,明明用的是一个扁扁的、贴在车头的【探针】;为什么这一期防行人,却要换成一个圆圆的、包裹住全身的【行人雷达】呢?”
这就涉及到了真实的无人驾驶车载传感器演进:
车头探针(摄像头视觉): 它的方向性极强,就像人的眼睛,只能盯着正前方固定的地方看(上一期用来死盯着前方的红绿灯)。
车身雷达(LiDAR激光雷达): 面对行人时,危险可能来自四面八方——行人可能会从斜前方横穿,也可能会从侧面突然撞向车身。所以我们必须把传感器做成一个360度全方位包裹的圆形“金钟罩”。只有这样,才能在行人靠近车身周围任意死角时,第一时间触发紧急避险制动!
我们在编程里从“线”到“圆”的角色形态改变,本质上就是工业级传感器从“视觉相机”到“全向激光雷达”的科技跨越。
四、 自动驾驶特训营·大收官
连续三期的特训,有趣爸带大家从零开始,手搓了一套具备高德路径导航、红绿灯路口动态生成、摄像头视觉识别、以及360度隐形车载雷达防追尾避险的工业级自动驾驶模拟系统!
你看,那些看似高大上、高不可攀的“人工智能自动驾驶”,拆解到最后,核心逻辑全都是孩子们每天都在使用的生活直觉与行为算法。
编程的最高境界,从来不是背诵枯燥的代码公式,而是用你观察世界的眼睛,把人类解决问题的智慧,用积木一块一块地翻译给计算机听。
自动驾驶特训营到此完美收官!你想看有趣爸下一期带大家手搓什么好玩的“生活算法”系统?是网约车动态派单派客算法?还是模拟生态平衡的“大鱼吃小鱼”鱼群围猎系统?神奇的滴灌技术?欢迎在评论区留下你的想法!
趣爸编程网dadcoming.com使命:孩子有趣爸
专注领域:兴趣与编程
工作联络:roomhj(微信)
 点击“阅读原文”进入趣爸编程网!
点击“阅读原文”进入趣爸编程网!