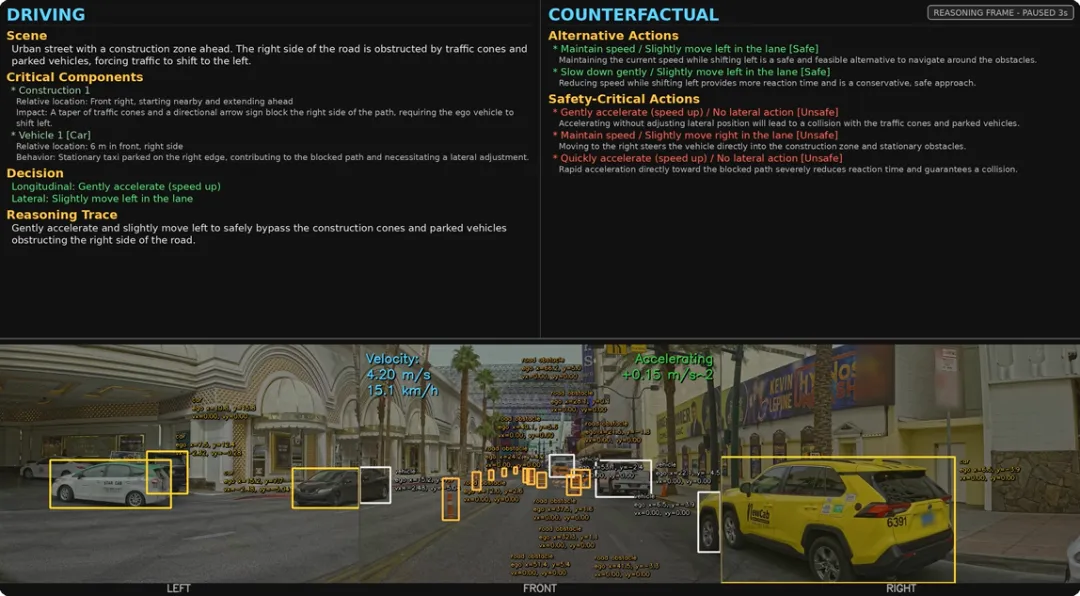
为什么是反事实推理?
人类驾驶时,很多判断并不只是在选择一个动作,也是在快速排除危险动作。
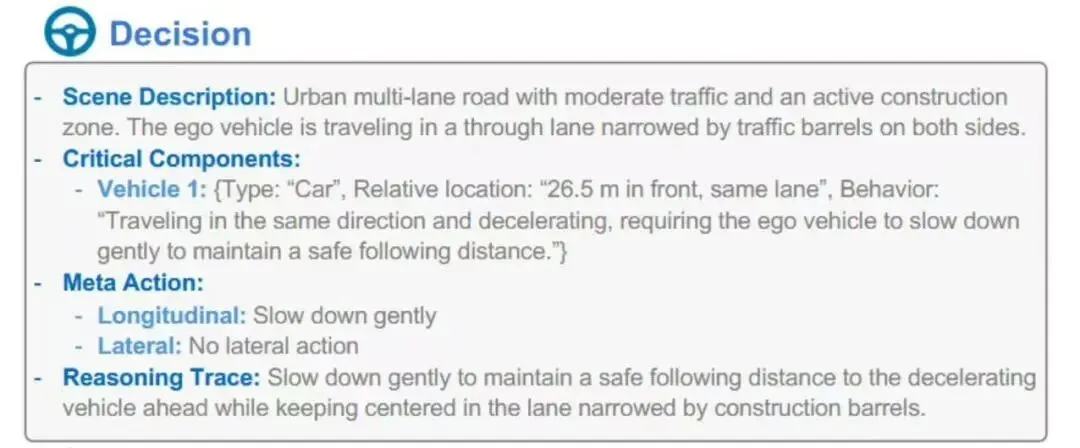
看到前车减速,我们会知道应该减速,也会知道继续加速会压缩安全距离。看到右侧有施工车辆和路障,我们会知道不能向右变道。看到行人接近斑马线,我们会知道抢行可能带来风险。
传统轨迹模仿数据通常只记录人类最后做了什么,却很少记录哪些动作被排除了,以及排除的原因。
这样会带来一个问题:模型可能学会某个场景下的表面动作,却没有真正理解动作背后的安全边界。
反事实推理补充的正是这一层信息。
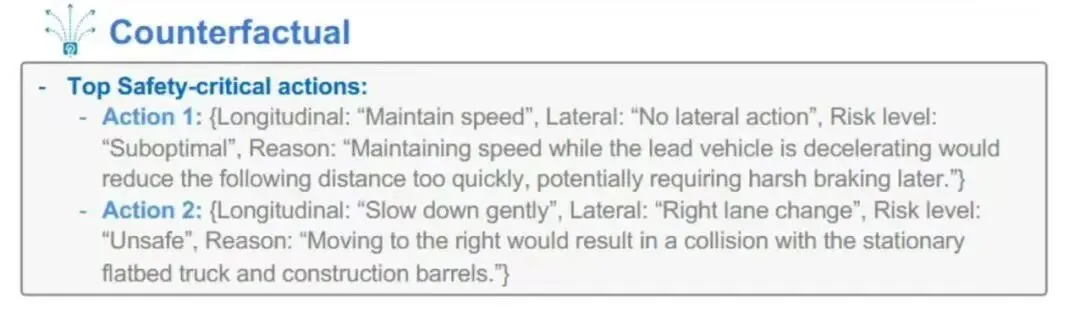
它让模型在同一场景下看到多个动作选项的后果。哪些动作安全,哪些动作只是低效,哪些动作会导致碰撞、违规、偏离路线或阻塞交通。
这对长尾场景尤其关键。
长尾风险往往来自多个因素的组合。施工桶、临停车辆、行人、路线指令、红绿灯和相邻车道车辆共同构成一个复杂决策空间。模型只知道最终轨迹,未必能学清楚这个空间里的安全边界。
有了反事实标注,模型可以更明确地学习哪些动作不能做,以及原因是什么。