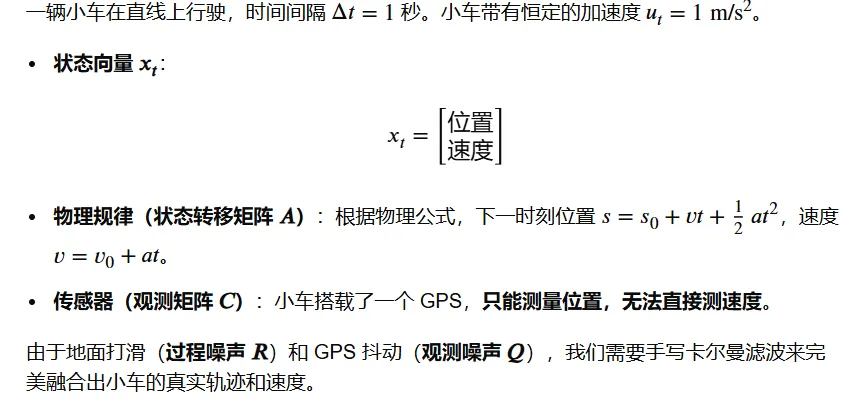
在自动驾驶和机器人领域,卡尔曼滤波(KF)是状态估计的基石。很多初学者看了无数遍数学推导,一到工程落地就抓瞎;或者只会调现成的库,根本不知道矩阵在底层是如何流转的。
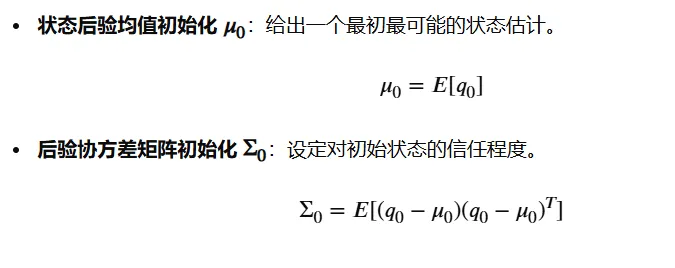
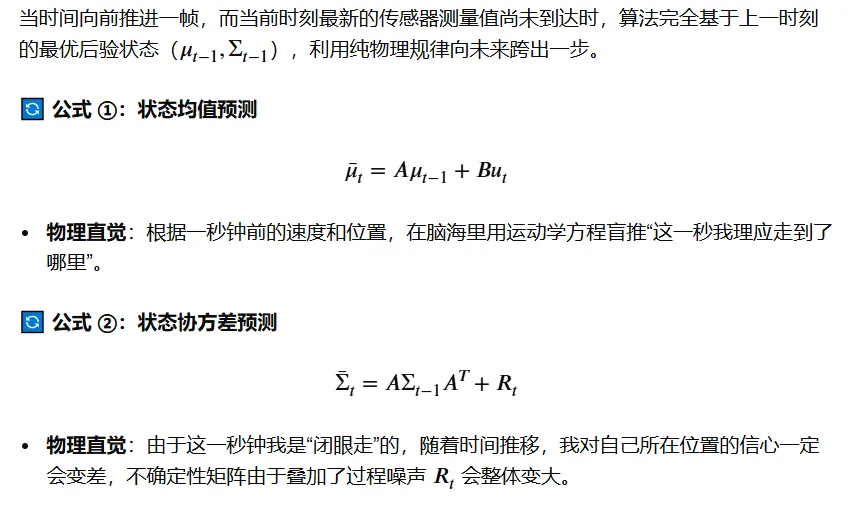
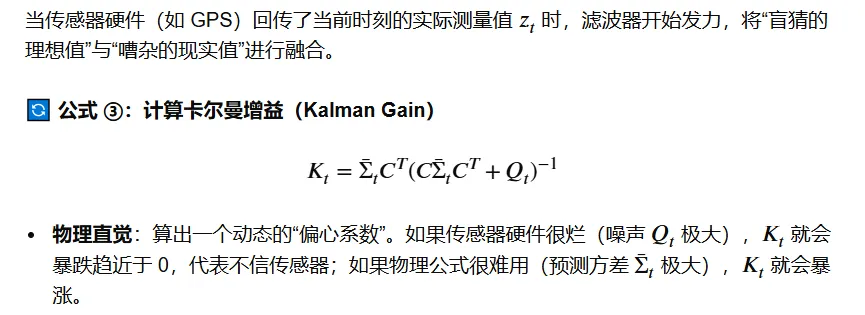
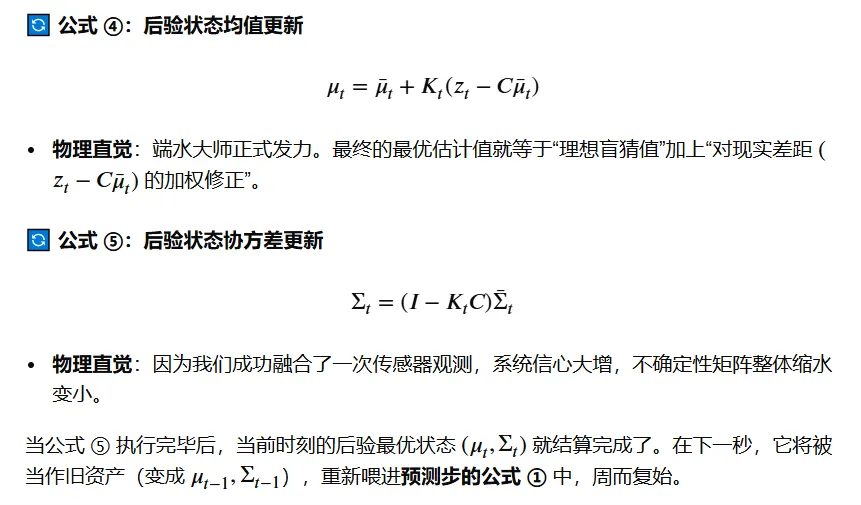
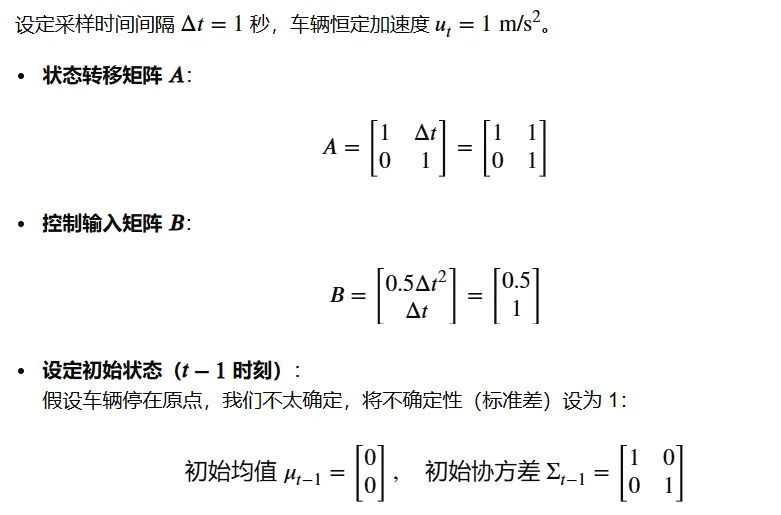
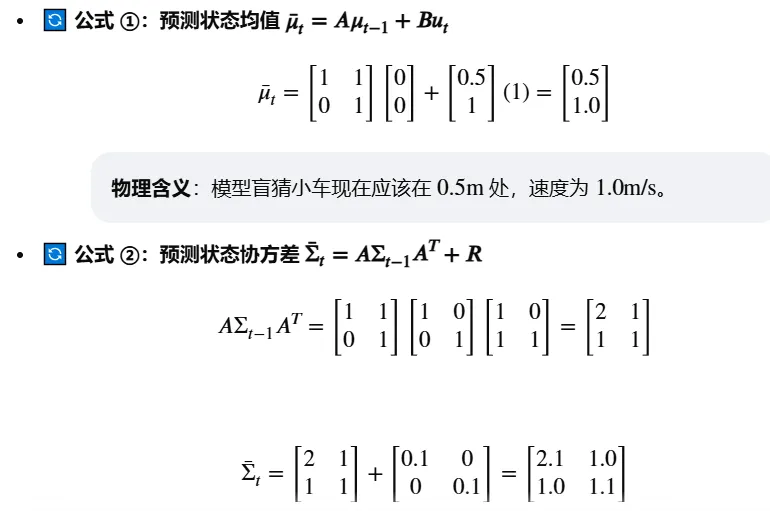
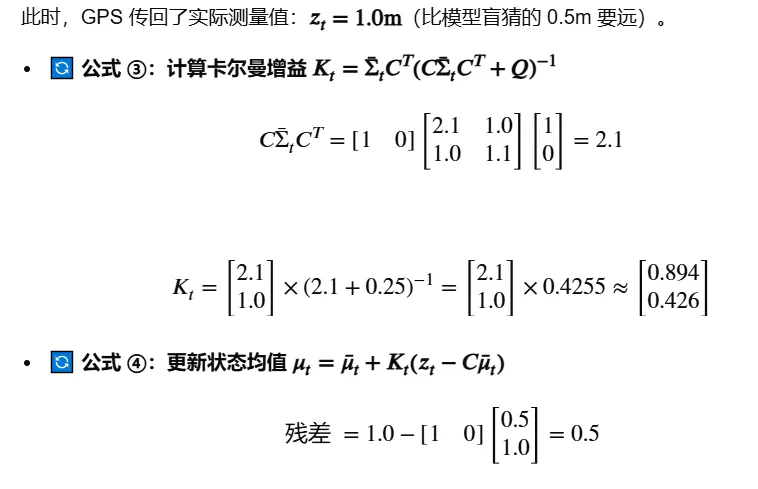
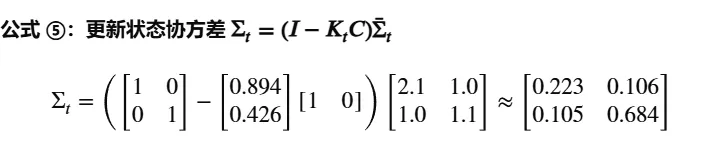
今天,我们不做纸上谈兵的数学家。站在自动驾驶算法工程师的角度,不依赖任何第三方滤波库,只用 NumPy,从零手写一个一维小车(位置+速度)的卡尔曼滤波追踪器。看完这篇文章,你不仅能秒懂五大公式,还能在代码中体会一步步的体会矩阵是怎么流转的!卡尔曼滤波在运行期间是一个无限的状态循环。每过一个固定的时间周期t它就会严格按照以下三大步骤、五大数学公式进行递进推演:在系统刚启动(t=0)时,算法需要一个基准线作为推导的起点,此时需要手动给定两个初始矩阵:2. 预测步(Prediction)———— 闭着眼睛靠物理公式盲猜3. 更新步(Update / Correction)———— 睁开眼看传感器,强力修正盲猜为了彻底看清五大公式在底层的流转,我们直接带入一组真实的自动驾驶工程数据,手动推导一个周期的完整闭环。2. 阶段一:预测步(Prediction)———— 靠物理公式盲猜物理含义:由于时间推移,不确定性变大了。更重要的是,位置和速度产生了正相关性(非对角线项变为 1.0),这是后面“反推速度”的关键!3. 阶段二:更新步(Correction)———— 融合传感器修正硬核解读:瞧!GPS 只测了位置,但在修正时,残差0.5乘以卡尔曼增益的速度项0.426,顺带把速度也向上修正到了 1.213m/s。这就是协方差相关性带来的“神奇反推”!物理含义:对比盲猜时的协方差对角线 [2.1, 1.1],融合传感器后,不确定性大幅下降到了 [0.223, 0.684]。系统信心大增!五、 从零手写:100行 Python 核心代码实现import numpy as npimport matplotlib.pyplot as plt
=====================================
1. 滤波器类定义:纯手工打造的卡尔曼滤波器
=====================================
class KalmanFilter: def init(self, A, B, C, R, Q, initial_x, initial_P): """ 构造函数:初始化卡尔曼滤波器的5个核心矩阵和2个初始状态 """ self.A = np.array(A)
状态转移矩阵 (A):描述系统如何随时间自行演变
self.B = np.array(B)
控制输入矩阵 (B):描述踩油门/刹车对系统的影响
self.C = np.array(C)
观测矩阵 (C/H):把车辆真实状态映射到传感器看得到的位置
self.R = np.array(R)
过程噪声协方差 (R):地面滑移、风阻等物理模型的误差
self.Q = np.array(Q)
观测噪声协方差 (Q):传感器硬件自带的随机电子噪声
self.x = np.array(initial_x)
最优状态估计值后验均值 μ (初始设为0)
self.P = np.array(initial_P)
状态不确定性后验协方差矩阵 Σ (初始置信度)
def predict(self, u): """ 第一步:预测步 (Prediction) ———— 闭着眼睛靠物理公式盲猜 """
公式 1:x̄t = A * x{t-1} + B * u_t (基于运动学规律推算当前位置和速度)
np.dot 是矩阵乘法。这里将上一时刻的状态乘以状态转移矩阵,再加上控制输入的贡献
self.x = np.dot(self.A, self.x) + np.dot(self.B, u)
公式 2:Σ̄t = A * Σ{t-1} * Aᵀ + R (由于多走了一秒,系统不确定性变大,再叠加过程噪声).T 代表矩阵转置。A * P * A.T 是高斯分布线性变换的经典方差推导结果
self.P = np.dot(np.dot(self.A, self.P), self.A.T) + self.R
return self.x, self.P
def update(self, z): """ 第二步:更新步 (Update/Correction) ———— 睁开眼看传感器,修正盲猜 """
公式 3:计算卡尔曼增益 K_t = Σ̄_t * Cᵀ * (C * Σ̄_t * Cᵀ + Q)⁻¹
S 矩阵代表“预测观测项的不确定性”,包含了理论预测方差和传感器的硬件噪声 Q
S = np.dot(np.dot(self.C, self.P), self.C.T) + self.Q
np.linalg.inv 用于求解矩阵的逆。K 矩阵就是最终用来调节权重的卡尔曼增益
K = np.dot(np.dot(self.P, self.C.T), np.linalg.inv(S))
公式 4:修正状态均值 x_t = x̄_t + K_t * (z_t - C * x̄_t)
(z - C * x) 叫做观测残差或创新(Innovation),代表“现实”与“理想盲猜”的差距
innovation = z - np.dot(self.C, self.x)
卡尔曼增益 K 决定了把多少百分比的“现实差距”补偿到盲猜的值里
self.x = self.x + np.dot(K, innovation)
公式 5:更新不确定性 Σ_t = (I - K_t * C) * Σ̄_t
eye(shape) 生成一个单位矩阵 I。因为融合了新传感器数据,后验不确定性 P 一定会变小
I = np.eye(self.A.shape[0]) self.P = np.dot((I - np.dot(K, self.C)), self.P)
return self.x, self.P
=====================================
2. 仿真场景设定:1D直线行驶的自动驾驶小车
=====================================
dt = 1.0
采样时间间隔为 1秒
物理矩阵构建
A = [[1.0, dt], [0.0, 1.0]]
位置 = 1位置 + dt速度; 速度 = 0位置 + 1速度
B = [[0.5 * dt ** 2], [dt]]
恒定加速度位移公式:s_加 = 0.5at²; v_加 = a*t
C = [[1.0, 0.0]]
[1, 0] 矩阵表示传感器(GPS)只能看清位置,速度维度的输出被抹为0
噪声大小设定
R = [[0.1, 0.0], [0.0, 0.1]]
过程噪声:假设位置和速度分别有 0.1 的物理扰动
Q = [[0.25]]
观测噪声:假设 GPS 的测距误差标准差为 0.5米(方差 = 0.5² = 0.25)
=====================================
3. 产生带有噪声的“真实世界”测试数据
=====================================
np.random.seed(42)
固定随机种子,确保读者在自己电脑上运行出来的图和我一模一样
true_x = np.array([[0.0], [0.0]])
车辆真实的初始状态 [初始位置=0, 初始速度=0]
u = np.array([[1.0]])
踩油门:给车辆输入恒定的 1 m/s² 加速度
true_positions = []
用于存放真实位置的历史记录
true_velocities = []
用于存放真实速度的历史记录
gps_measurements = []
用于存放被噪声污染的 GPS 历史记录
time_steps = 30
让小车跑 30秒
for _ in range(time_steps):
模拟物理世界的真实运动:x_true = Ax + Bu + 真实环境里的不可控噪声
process_noise = np.random.multivariate_normal([0, 0], R).reshape(2, 1) true_x = np.dot(A, true_x) + np.dot(B, u) + process_noise
模拟 GPS 硬件传感器的干预:z = C*x_true + 传感器自带的随机抖动误差
obs_noise = np.random.normal(0, np.sqrt(Q[0][0])) z = np.dot(C, true_x) + obs_noise
保存数据用于后续画图
true_positions.append(true_x[0][0]) true_velocities.append(true_x[1][0]) gps_measurements.append(z[0][0])
=====================================
4. 核心环节:把数据喂进手写的卡尔曼滤波器
=====================================
假设我们一开始完全不知道车在哪,随便猜一个位置 0,不确定度设为 1
initial_x = [[0.0], [0.0]]initial_P = [[1.0, 0.0], [0.0, 1.0]]
实例化前面写好的类
kf = KalmanFilter(A, B, C, R, Q, initial_x, initial_P)
estimated_positions = []
存放 KF 滤波后的优良位置
estimated_velocities = []
存放 KF 逆推出来的优良速度
for t in range(time_steps):
1. 物理时钟前进,滤波器执行预测步
kf.predict(u)
2. GPS 收到新数据,滤波器执行更新步(传入当前时刻的标量测量值值)
x_post, _ = kf.update(np.array([[gps_measurements[t]]]))
记录滤波输出
estimated_positions.append(x_post[0][0]) estimated_velocities.append(x_post[1][0])
=====================================
5. 可视化:生成清晰直观的对比图
=====================================
plt.figure(figsize=(14, 5))
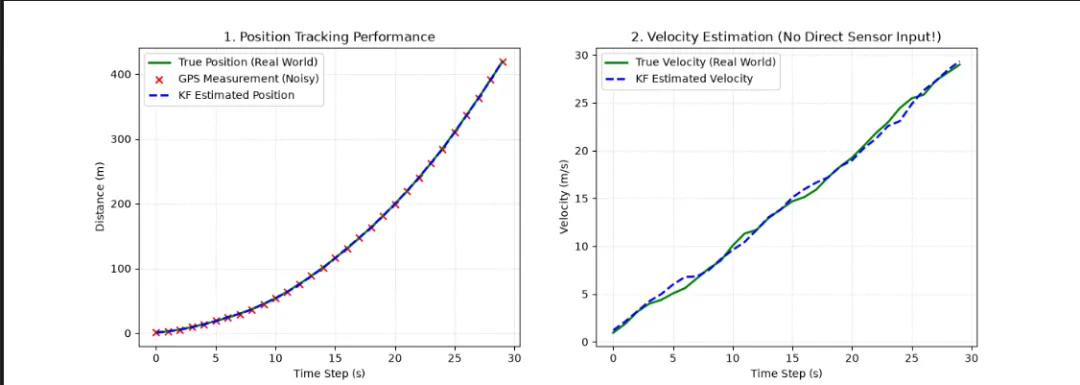
左图:位置追踪对比(完美的去噪能力)
plt.subplot(1, 2, 1)plt.plot(true_positions, label='True Position (Real World)', color='g', linewidth=2)plt.scatter(range(time_steps), gps_measurements, label='GPS Measurement (Noisy)', color='r', marker='x', s=40)plt.plot(estimated_positions, label='KF Estimated Position', color='b', linestyle='--', linewidth=2)plt.title('1. Position Tracking Performance', fontsize=12)plt.xlabel('Time Step (s)')plt.ylabel('Distance (m)')plt.legend()plt.grid(True, linestyle=':', alpha=0.6)
右图:速度估计对比(无中生有的神级反推)
plt.subplot(1, 2, 2)plt.plot(true_velocities, label='True Velocity (Real World)', color='g', linewidth=2)plt.plot(estimated_velocities, label='KF Estimated Velocity', color='b', linestyle='--', linewidth=2)plt.title('2. Velocity Estimation (No Direct Sensor Input!)', fontsize=12)plt.xlabel('Time Step (s)')plt.ylabel('Velocity (m/s)')plt.legend()plt.grid(True, linestyle=':', alpha=0.6)
plt.show()
运行代码后,你将看到以下震撼的结果:
- 完美去噪(看左图):红色的 GPS 测量值抖动得非常厉害,如果自动驾驶汽车直接听从 GPS 的话会疯狂画龙。而蓝色的卡尔曼估计曲线完美过滤掉了噪声,紧紧贴合绿色的真实轨迹。
- 无中生有(看右图):我们的传感器根本无法测量速度! 观测矩阵 C把速度完全抹去了。但是依靠卡尔曼滤波在预测步建立的状态相关性,仅凭位置数据,算法就完美“反推”出了小车精确的速度曲线!这就是数据融合的魅力。


 10个月宝宝每天需要喝多少奶粉?
10个月宝宝每天需要喝多少奶粉?
