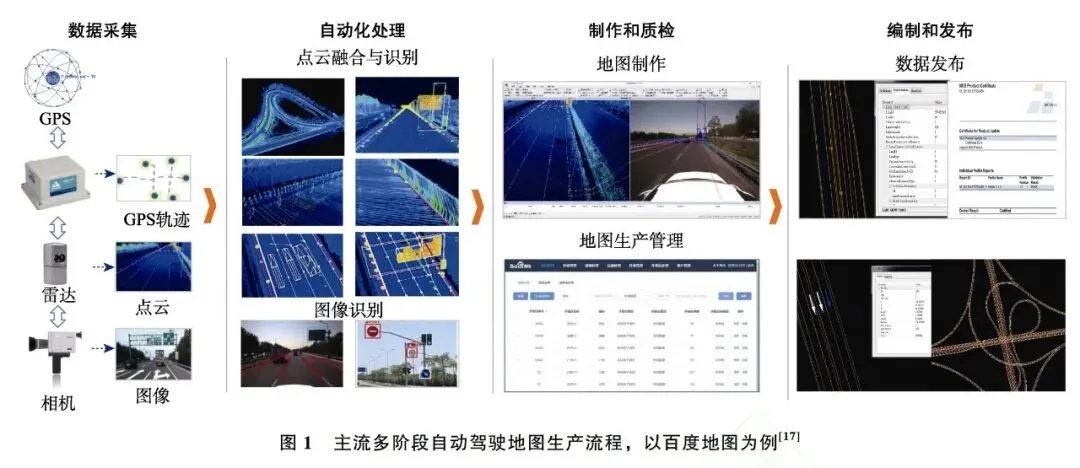
自动驾驶地图借助高精度、高丰富度的结构化数据,满足智能汽车在感知定位和规划决策等关键任务上的需求。除了传统导航电子地图中的道路级信息外,自动驾驶地图还通过多维度、分层次的数据组织方式,对车道级路网信息、动态交通事件、道路交通规则和驾驶行为先验等数据内容进行表达,从而为系统提供超出车载传感器实时感知范围的时空先验信息及安全冗余支持。在工程应用实践中,传统制图模式依赖专业测绘和人工标注,面临生产成本高、更新周期长、环境变化响应不及时等问题。随着深度学习及多模态模型的持续发展,自动驾驶地图的端到端生成方法逐渐成为研究热点,这类方法通过把传感器输入直接转化为结构化地图数据,减少甚至摆脱人工干预。相较于传统多阶段方案,地图端到端生成方案在自动化和时效性方面有更好的优势,因此对中国城市道路中存在的非结构化、高动态及地区差异等场景具有更高的适配性。
本文围绕自动驾驶地图端到端生成技术展开综述:首先对传统多阶段制图方法及存在的技术局限等进行总结和回顾;然后对近年来地图端到端生成方法做归纳,对典型算法的原理和性能做对比分析;随后结合大模型和视觉语言模型的相关进展,讨论其在地图生成任务中的潜力和当前实际应用的局限;最后总结当前仍待解决的挑战,并给出未来可能的研究趋势判断。本综述从中国城市道路交通实际出发,通过系统性梳理自动驾驶地图端到端生成技术的发展和演进路径,为后续研究和实践提供参考。
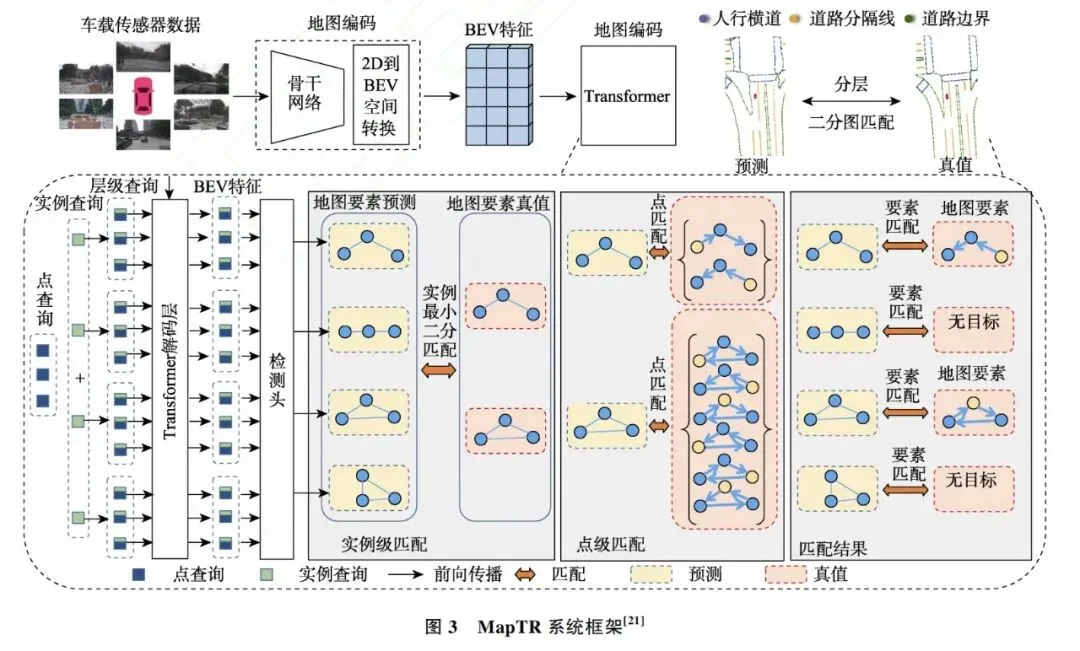
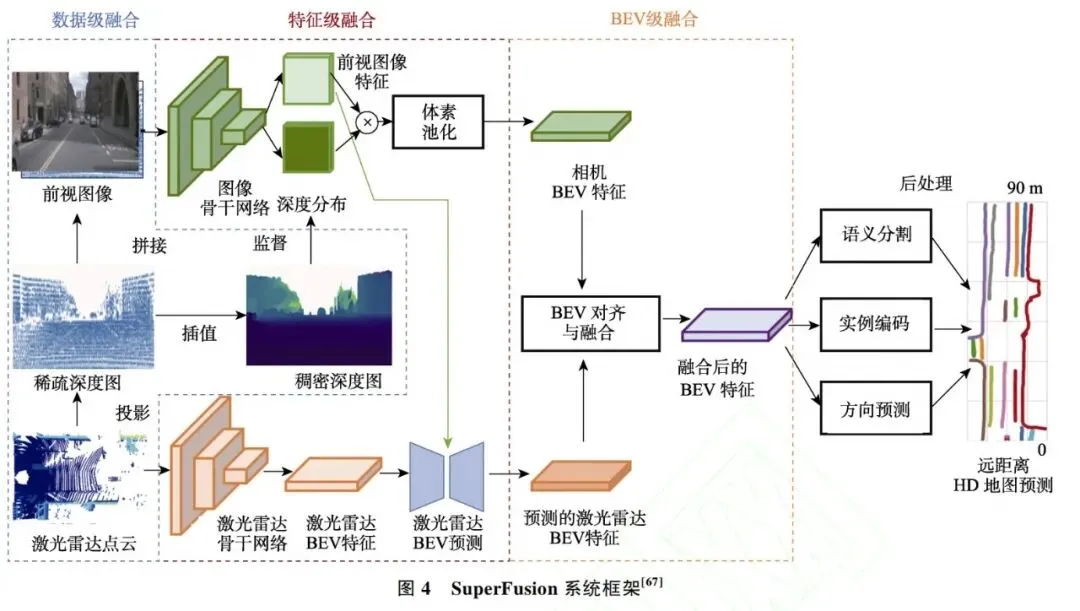
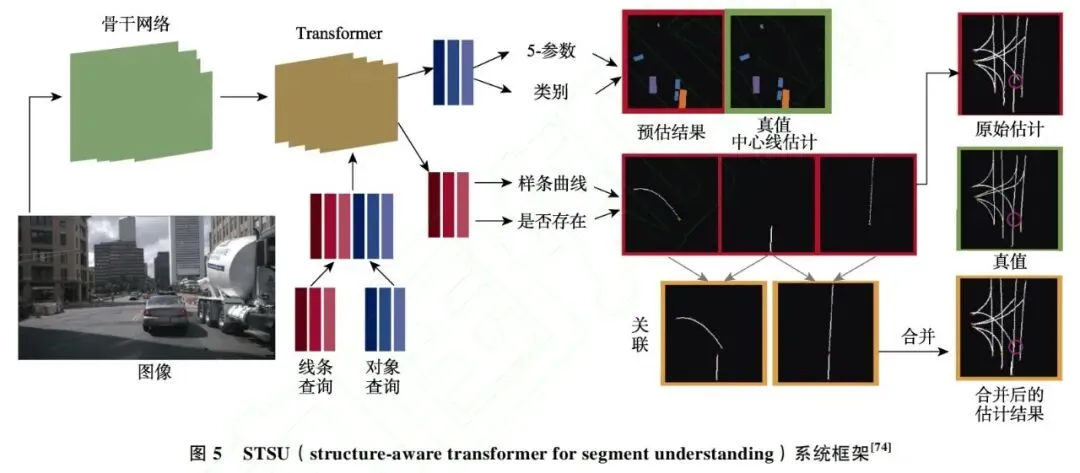
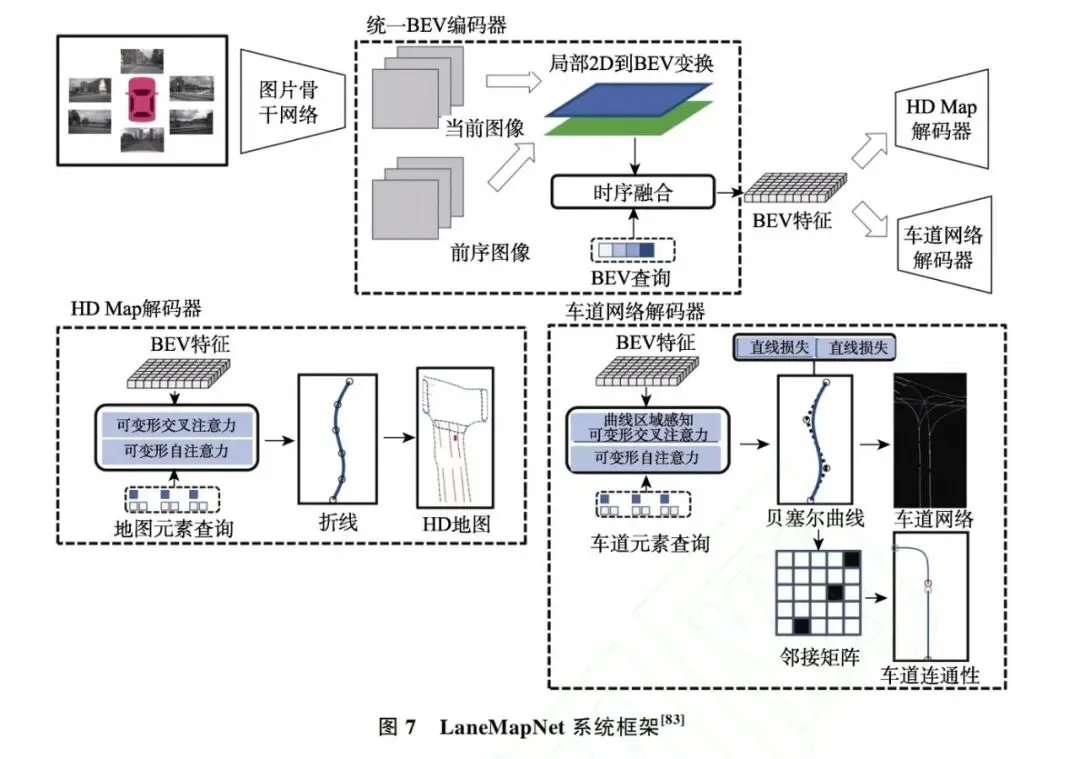
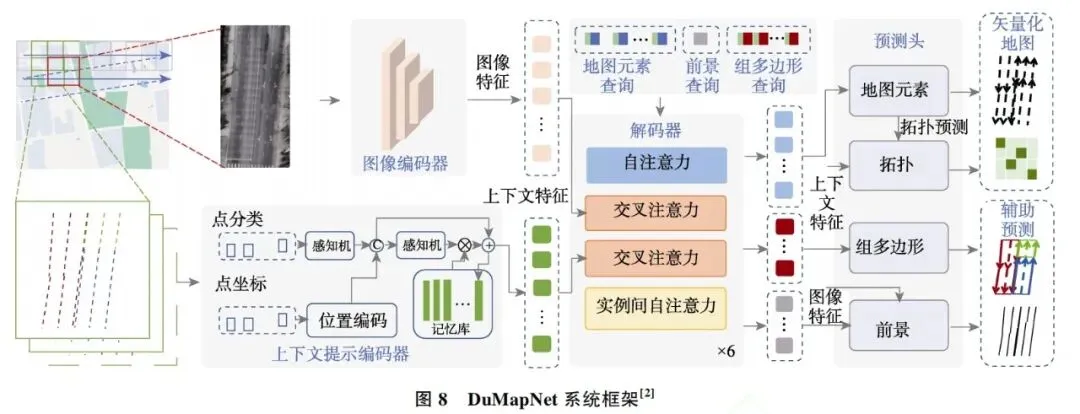
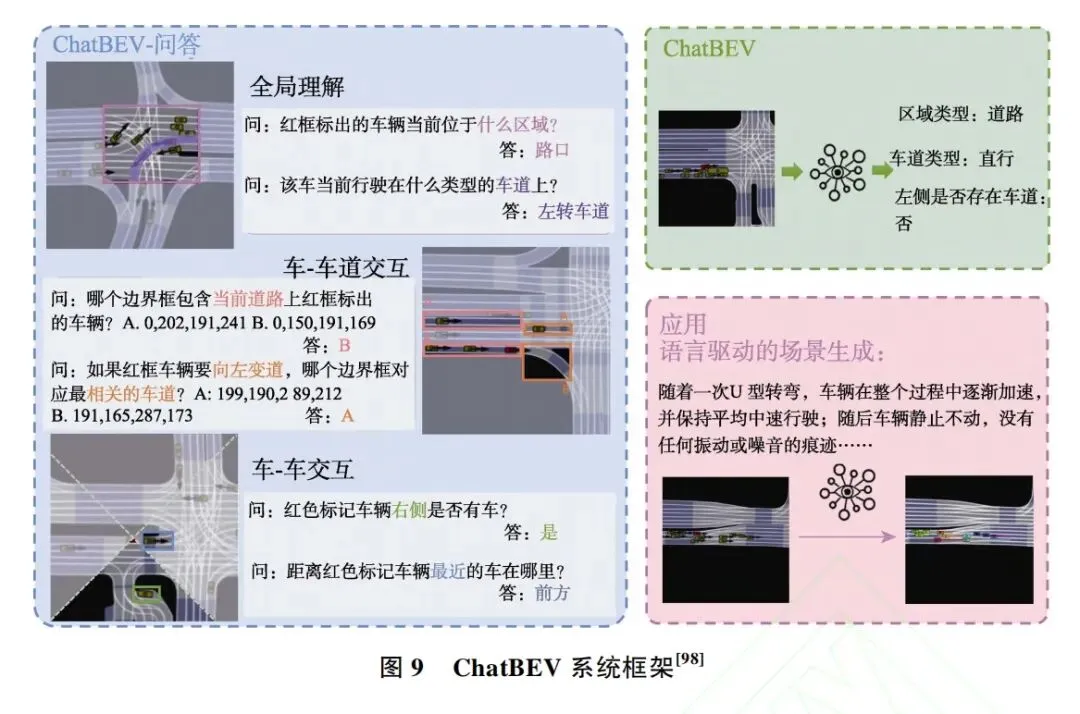
部分图表如下:



 10个月宝宝每天需要喝多少奶粉?
10个月宝宝每天需要喝多少奶粉?
