💡 核心痛点:理想很丰满,现实很“弯曲”
在导航和定位领域,卡尔曼滤波(KF)可以说是大名鼎鼎。但传统的卡尔曼滤波有一个致命的“死穴”:它假设世界是线性的。
线性意味着机器人的运动必须是标准的直线。但现实世界中:
这些全部都是非线性的!只要世界一“弯曲”,传统的卡尔曼滤波就彻底抓瞎了。为了解决这个痛点,扩展卡尔曼滤波(EKF,Extended Kalman Filter)应运而生。
🛠️ 解决思路:以直代曲
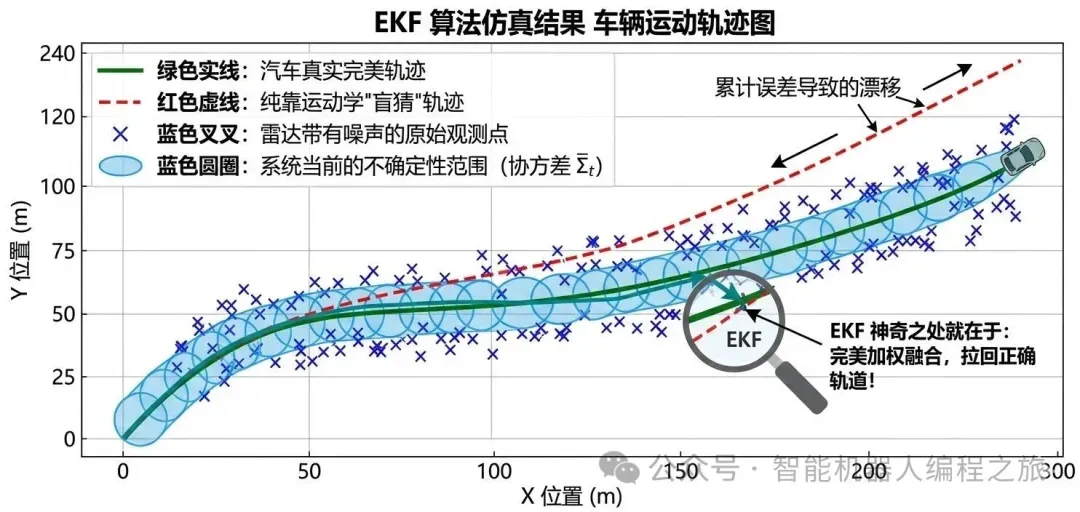
面对复杂的非线性曲线,EKF 的思路非常暴力且聪明:既然曲线不好算,那我就在当前位置画一条切线,用直线来代替曲线!
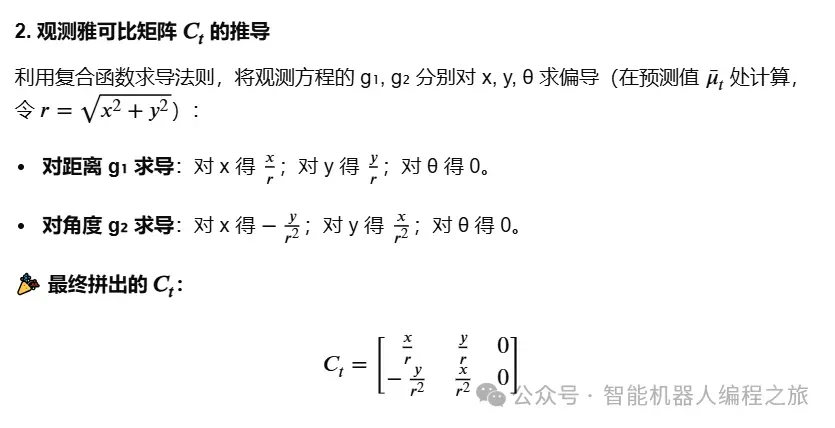
利用高等数学里的一阶泰勒展开,通过求导,能得到两个代表“当前位置斜率”的矩阵。在学术上,它们被称为雅可比矩阵(Jacobian Matrix):