在全球汽车产业加速迈向 L3 级自动驾驶与软件定义汽车(SDV)的关键阶段,德州仪器在 CES 2026 上也正式推出其全新汽车产品组合。这套由高性能计算 SoC、4D 成像雷达和新型以太网 PHY 构成的“铁三角”,旨在从感知、计算、通信三个核心维度,为汽车制造商提供一套可扩展、高能效且安全可靠的端到端解决方案,从而加速高级别自动驾驶技术在全系车型中的普及。
“每一辆汽车都搭载着数千颗半导体芯片,这些芯片正持续推动高级驾驶辅助系统、电动汽车动力总成、沉浸式信息娱乐系统以及车内智能系统的变革升级。我们相信,TI 目前所推进的工作,几乎决定着 2030 年之后汽车会变成什么样。”TI 汽车系统业务部总监 Mark Ng 如是说。
高性能计算 SoC:解锁 L3 级自动驾驶算力瓶颈
自动驾驶的演进正推动汽车电子架构从分布式向集中式转变,一个强大的“中央大脑”成为刚需。TI 处理器业务部副总裁 Roland Sperlich 表示,2026 年,大多数车辆将配备足够的驾驶辅助技术,支持 L1 或 L2 级自动驾驶。未来几年,许多汽车制造商都计划向 L3 级自动驾驶技术跨越,该级别下车辆将承担主要驾驶责任。
目前,L3 级自动驾驶通常需要数百 TOPS 的 AI 算力支撑,而完全自动驾驶则需要超过上千 TOPS 的算力。因此,随着处理需求持续攀升,汽车制造商正逐步采用搭载集中式计算平台的区域架构。即通过一个中央计算单元,实现高级传感器融合和动态资源分配,而这一进化的核心是一款高性能的 SoC,它将 CPU、NPU、GPU、加速器、内存和接口等大多数计算组件集成到单个芯片上。
“与汽车客户交流时,我总是听到一个共同的主题。许多客户希望将这些功能覆盖到全系车型中,但他们普遍面临一个难题:即难以找到一款能够平衡性能、功耗与成本的解决方案,从而让更高级别的自动驾驶技术普及至大众市场。这时就需要 TI 登场了。”Roland 说。
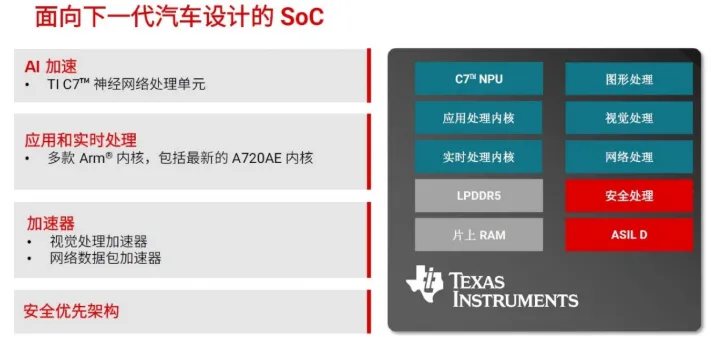
TI 此次推出的全新 TDA5 系列高性能计算片上系统 (SoC),正是这一理念的落地载体——通过构建从 10TOPS 到 1200TOPS 的可扩展算力平台,不但能运行自适应巡航控制或倒车影像等基本功能,甚至可扩展至 L3 或更高级别的自动驾驶能力,完美覆盖从入门级驾驶辅助到 L3 级条件式自动驾驶的全场景需求。
全新 TDA5 系列搭载第七代 TI C7™神经处理单元 (NPU),在同等功耗下 AI 算力较前代提升 12 倍,可高效处理包含数十亿参数的大语言模型与 Transformer 网络。同时能效比突破 24TOPS/W,无需额外配备昂贵散热系统,为电动汽车续航能力提升提供支持。
实际上,TI 已经有超过 40 年的 DSP 和 AI 技术经验。其强大的性能支持在芯片本地运行多种 AI 模型,包括 LLM、VLM 及先进的变压器网络,可处理多达数十亿的模型参数。它的 AI 工作负载实现了“物理 AI”,即通过将推理计算与执行操作深度耦合,驱动现实世界中的物理运动,例如自动驾驶车辆检测到红灯后自动刹车。
TDA5 系列采用先进芯粒 (Chiplet) 设计与标准 UCIe 接口。这意味着,借助业界通用的 UCIe 互连,工程师可根据车型需求灵活配置算力单元、图形处理能力及内存资源,实现 ADAS、车载信息娱乐系统 (IVI) 与网关功能的单芯片跨域融合。
其安全优先架构原生支持汽车功能安全最高等级 ASIL-D 标准,通过混合关键性处理技术确保非关键系统故障不会影响制动、转向等核心功能。简单来说,就是如果车载信息娱乐系统这类非关键系统出现故障时,不会导致制动系统等关键功能随之失效。
为加速产品落地,TI 还与新思科技 (Synopsys) 合作推出虚拟开发套件 (VDK) 使工程师在硬件就绪前即可完成算法开发与场景验证,从而帮助 OEM 更快地将新功能推向市场,更高效且具成本效益地测试和验证设备,并能提前预测性能、发现问题,从而提升最终产品的质量和可靠性。
4D 成像雷达:重新定义环境感知精度与距离
如果说 SoC 是自动驾驶的“大脑”,那么雷达传感器就是“眼睛”。按照 TI 高性能雷达业务部产品线经理 Keegan Garcia 的表述,“雷达是实现更高级 ADAS 用例和更高自动驾驶水平的关键技术,因其在各种天气条件下都具备强大的适应性。”尤其是 4D 成像雷达,更是实现 L3 级及以上的自动驾驶上述安全应用场景的必备技术。
相较于传统雷达只能采集距离、速度和方位角(水平角度)数据,4D 成像雷达新增了垂直角度测量功能。但 4D 成像雷达的落地应用,长期以来面临一个设计难题:工程师需要将多颗芯片级联,才能搭建出足够大的天线阵列。
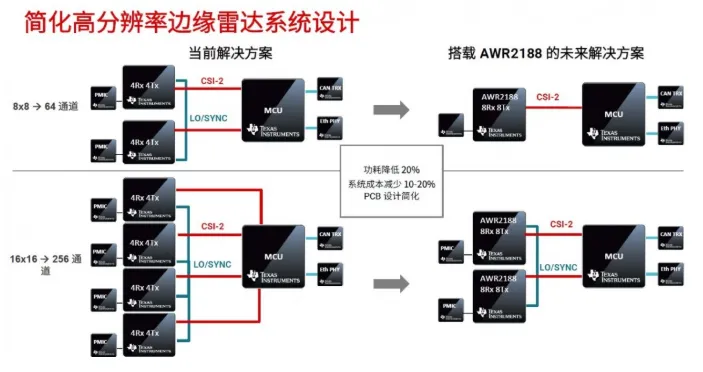
为克服这一挑战,TI 在最新发布的业界首款单芯片 8 发 8 收 (8Tx/8Rx)AWR2188 4D 成像雷达发射器中,通过高度集成化设计,将 8 个发射器与 8 个接收器整合于单颗芯片,无需芯片级联即可实现 64 通道高分辨率探测。如果想拓展至 16x16 配置也仅需 2 颗芯片,较传统方案减少 50%器件数量,将雷达系统设计推向了新高度。
AWR2188 模数转换器采样率达 66Msps,线性调频信号斜率提升至 266MHz/μs,性能较现有解决方案提升 30%。其 4D 成像能力可精准探测 350 米外的目标物体,远高于目前传统前向雷达 250 米的检测距离,能有效识别桥梁、车辆、行人甚至低矮障碍物,并有效应对“高速跟车时前方掉落货物”、“拥堵路段紧邻车辆识别”等高动态范围的棘手场景。
举例而言,假设你正驾车跟在一辆卡车后方,卡车上有一个小箱子掉落。你的车辆需要及时检测到这个箱子,判断其尺寸大小,并决定是直接驶过还是变道绕行。我们将这类场景称为“掉落物检测”。
又或者当你在车水马龙的城市道路行驶,或是陷入拥堵的车流时,车辆之间的间距会变得极小。传统雷达设备只能生成一个大面积的点云数据,而新一代雷达芯片则需能够更精准地定位并区分这些紧邻的车辆。
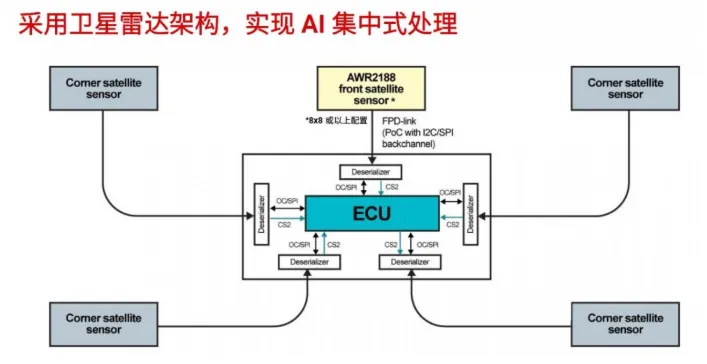
AWR2188 支持卫星式与边缘式两种架构部署,适配从入门级到高端车型的全系 ADAS 需求。尤其是随着高性能计算的成本不断下降且更易获取,越来越多的汽车开始采用集中式电子控制单元 (ECU)。这意味着要有足够的计算能力在中央 ECU 中进行雷达处理,进而实现所谓的卫星雷达。
在卫星雷达架构中,该器件可通过 CSI-2 接口与 TI FPD-Link 系统无缝连接,将原始雷达数据直接传输至中央计算单元,实现与摄像头、激光雷达数据的深度融合,构建高精度三维环境模型。该方案可使系统功耗降低 20%,成本减少 10%-20%,并简化 PCB 设计流程。目前,AWR2188 的量产前样品和评估模块已开放申请,将成为 L2+至 L3 级自动驾驶系统的关键感知组件。
以太网 PHY:构建软件定义汽车统一网络架构
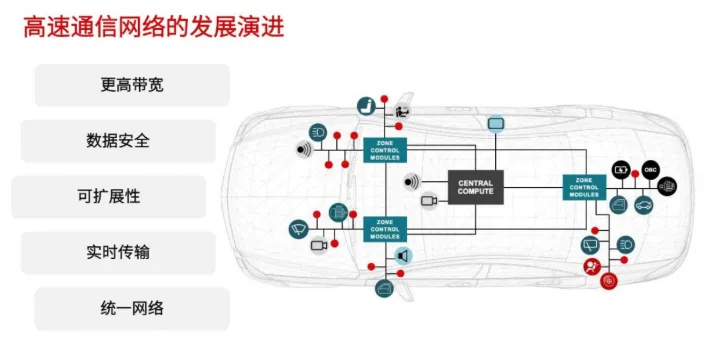
软件定义汽车(SDV)的快速发展和自动驾驶等级的不断提升,正推动汽车子系统架构发生根本性变革。以太网是助力这场变革的重要技术,它能够通过简洁统一的网络架构,支持系统在汽车各功能域之间实时采集并传输更多数据。
为此,针对软件定义汽车对车载网络的高带宽、低延迟需求,TI 推出了 DP83TD555J-Q1 10BASE-T1S 以太网物理层(PHY)芯片,首次将以太网技术拓展至车辆边缘节点。
该产品集成媒体访问控制器,支持纳秒级时间同步与数据线供电功能,可在单根线路上同时传输电力与数据,显著降低线缆设计复杂度与成本。其兼容行业主流通信协议,能够与 CAN、LIN 总线协同工作,为照明控制、车窗调节、音频同步等边缘应用提供灵活连接方案。
Mark Ng 表示,10BASE-T1S 以太网的引入,直接推动了车载网络从分布式域控制器架构向集中式区域架构演进,使中央计算单元能够实时采集并处理各功能域数据。该技术无需在边缘设备配备独立 MCU,可通过 IP 网络直接传输复杂数据,避免了 CAN/LIN 数据与以太网数据的转换开销,为雷达、激光雷达等高性能传感器提供高效数据传输通道。因此,借助 10BASE-T1S 技术,以太网的优势可进一步延伸至车辆边缘节点,用于控制座椅、车门、车灯、车内照明、车内感知以及电池管理等各类设备。
结语
在最新的一篇博文中,Mark Ng 指出,预计到 2028 年,全球对自动驾驶车辆的资本投入将增长逾 7 亿美元。而 SDV 将成为实现未来出行图景的关键:驾驶者无需每隔几年就换新车,同样能获得最新的自动驾驶功能。
对于汽车设计师而言,SDV 意味着软件开发需要于硬件解耦,这会从根本上改变他们构建汽车的方式。汽车制造商正在将软件整合至更少的 ECU 中,这不仅能提升车辆平台的可扩展性,也能简化远程在线升级的流程。这些 ECU 能够实时处理特定自动驾驶功能的控制,例如自动制动或自动转向模块。
“我们负责把那些曾被认为不可能完成的设计任务,做得更高效、更省成本,同时提升能效,使其能够适应边缘设备中更紧凑的空间。”Roland 表示,“我们希望站在行业前沿,尽可能贴近客户。“
责编:Lefeng.shao
关注“电子工程专辑”加小编微信
现已开放地区群,请发送消息【深圳】【上海】【北京】【成都】【西安】到公众号