导语
2026年CES展会上的一个共识正在重新定义规则:汽车业的未来不再仅仅是“软件定义”,而是“AI定义”。
从洛杉矶市中心到硅谷的101号公路上,一辆测试车正平稳行驶,突然前方出现了一辆侧翻的货车和散落一地的货物,传统系统可能会急刹甚至误判,但这辆车却像经验丰富的司机一样,提前减速、平稳变道、安全通过。
当我们仍沉浸在“软件定义汽车”的浪潮中时,2026年CES展会上的一个共识正在重新定义规则:汽车业的未来不再仅仅是“软件定义”,而是“AI定义”。
01 范式转变
每年CES的展台上,车企和科技公司都会竞相展示最炫酷的概念和最前沿的技术。2026年的展会却透露着一种不同寻常的务实感,行业顶尖公司的CEO和技术负责人们不约而同地谈论着一个共同的主题。
这个主题不再局限于屏幕数量、处理器算力或软件OTA频率这些过去几年反复翻炒的概念。一个更根本的变革正在发生:从“软件定义”向“物理AI”的范式转移。
物理AI与传统AI的核心差异在于其责任边界。当一个AI模型在云端生成一段文本或一张图片时,它的错误可能令人不快,但通常不会造成物理伤害。而当一个AI系统在现实世界中控制一辆两吨重的汽车时,它的每一次判断都与生命安全直接相关。
物理AI要求的不只是“处理信息”,而是“理解并负责地作用于物理世界”。这意味着AI必须开始理解重力、摩擦、惯性和材料特性这些人类几乎本能掌握但机器却难以捉摸的物理规律。
02 困局与局限
当前主流的自动驾驶技术框架正面临一个根本性困境:尽管我们的传感器越来越灵敏,处理器算力成倍增长,算法模型也越来越复杂,但系统的智能水平似乎撞上了一道看不见的天花板。
这一困境源于“大数据拟合”模式的内在限制。现有自动驾驶系统主要通过分析海量驾驶数据,学习在特定场景下应该采取什么动作。
这种模式下,AI学会了识别各种物体,能够预测常规交通参与者的行为,甚至在复杂城市环境中完成导航任务。然而,当面对从未在训练数据中出现过的“长尾场景”时,系统的脆弱性就暴露无遗。
长尾场景不一定是多么极端的状况,而常常是多个普通因素的意外组合。一位资深自动驾驶工程师曾告诉我:“我们的系统能完美处理突然窜出的猫,也能识别倒下的树木。但当下雨天的黄昏,一只猫从倒下的树木后窜出,旁边还有一个穿着反光衣但拿着非标准手势牌的建筑工人时,系统就可能完全混乱。”
这种混乱的背后,是当前AI缺乏对物理世界基本规律的理解。它看到了所有元素,却没有理解这些元素之间的因果关系和物理约束。就像一个人背下了整本字典却不理解语法规则,无法真正理解句子的含义。
03 核心跨越
2026年,行业开始向新的方向突破:不再仅仅让AI“看见”世界,而要让它“理解”世界。这种从感知到理解的跨越,需要AI建立对物理世界的基本认知模型。
英伟达开源的视觉-语言-动作模型Alpamayo 1在这方面提供了重要思路。与传统系统不同,Alpamayo 1的设计哲学是让AI建立对物理世界的解释性理解,而不仅仅是学习输入与输出之间的统计相关性。
Alpamayo 1的核心创新在于其多模态融合方式。它不将视觉、语言和动作视为独立的模块再简单拼接,而是在一个统一框架下同时处理这些信息,让系统能够理解“为什么轮胎在湿滑路面上需要更长时间才能停止”这样的物理概念。
该系统通过一种称为“神经物理推理”的机制运作。简单来说,它会在内部模拟物理世界的基本法则,如物体碰撞、运动轨迹和力传递。当面对新场景时,它不仅仅匹配相似的模式,而是基于这些内部物理模型进行推理。
这种理解物理因果关系的能力,正是当前自动驾驶系统所缺乏的核心智能。如果一辆车理解了惯性、摩擦系数和制动距离之间的物理关系,它就能更好地判断在湿滑路面上与前车保持的安全距离。
04 根本性变革
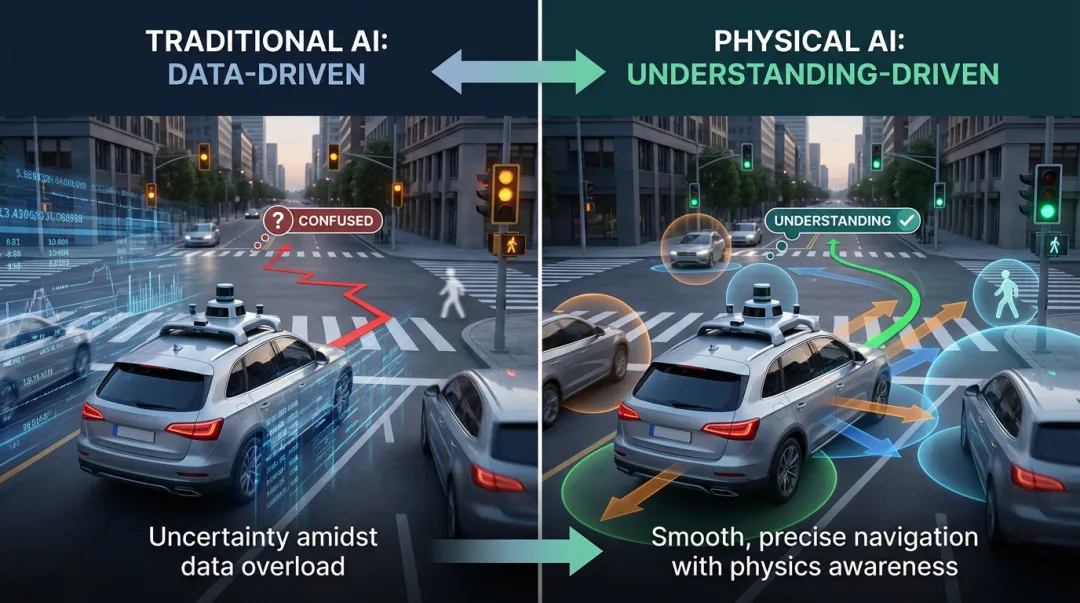
物理AI带来的远不止技术升级,而是一场根本性的行业变革。最直接的影响是,自动驾驶系统的开发范式将从“数据驱动”转向“理解驱动”。
这种转变将极大地改变自动驾驶的训练方式。目前,系统需要海量的真实驾驶数据来覆盖各种可能的情况。而具备物理理解能力的AI能够从更少的数据中归纳出更普适的规律,因为它学习的不是表面的模式,而是底层的物理原理。
梅赛德斯-奔驰公司计划在2026年底量产搭载新一代AI驾驶系统的车型,这一计划反映了行业领跑者对新方向的认可。该公司的技术负责人曾表示:“我们不再追求收集‘所有可能的数据’,而是追求让系统理解‘所有可能的物理规律’。”
当AI开始理解物理世界时,整个行业的技术依赖关系也将发生变化。高精地图曾是许多自动驾驶系统的必需品,因为它提供了关于道路的精确三维信息。
但随着AI对物理世界理解能力的增强,系统能够根据实时感知和物理推理来导航,对预先绘制的高精地图的依赖将逐渐降低。这不仅能降低系统成本,还能让自动驾驶车辆在未绘制地图的区域也能安全行驶。
激光雷达行业也将面临重新定位。当AI能够通过摄像头和其他传感器理解场景的三维结构和物体运动规律时,对昂贵激光雷达的绝对依赖可能减弱。这不是说激光雷达会消失,而是其角色将从“不可或缺的核心传感器”转变为“提升冗余和特定性能的辅助传感器”。
05 新挑战
物理AI的道路并非一片坦途。这种新型AI系统面临着一个老问题的新版本:可解释性挑战。
传统深度学习模型因其“黑箱”特性而备受诟病,而当这些模型控制着高速行驶的车辆时,问题变得更加尖锐。物理AI虽然理论上具有更好的解释性,但实际上,其内部推理过程可能同样复杂难懂。
开发人员需要找到方法“窥视”这些系统的“思维过程”,确保它们是基于正确的物理原理进行推理,而不是找到了某种统计捷径。行业正在研究各种可视化工具和解释方法,试图让AI的物理推理过程对人类更加透明。
安全性验证也变得更加复杂。如何证明一个基于物理理解的AI在所有可能的道路情况下都是安全的?传统的测试方法是通过数百万英里的道路测试来验证系统,但对于物理AI,我们可能需要全新的验证框架。
一些研究团队正在开发基于物理仿真的测试平台,能够在虚拟环境中系统性地测试AI对不同物理场景的反应。这些平台可以创造出在现实世界中极为罕见但物理上可能的场景,如不同路面摩擦系数组合下的紧急避让情况。
06 平衡点
在物理AI的发展道路上,一个微妙的平衡点正在形成:如何在不牺牲系统可解释性和安全性的前提下,利用AI的强大学习能力解决实际驾驶问题。
行业中的一种思路是采用“混合架构”,将基于物理模型的传统规划方法与数据驱动的AI方法相结合。在这种架构中,物理模型提供基础的安全约束和可解释性,而AI系统则在这些约束下学习更优的驾驶策略。
另一种方法是开发“可核查的AI”,即设计本身就包含可解释性和安全性证明的AI系统。这类系统不仅输出驾驶决策,还同时输出该决策的物理依据和安全边界。当系统不确定时,它会明确表达这种不确定性,并将控制权交给人类驾驶员或进入最小风险状态。
无论采取哪种路径,一个共识正在形成:物理AI不应该是一个完全自主的黑箱系统,而应该是一个能够与人类驾驶员有效协作的智能伙伴。这种伙伴关系不仅体现在控制权的平稳交接上,更体现在系统能够以人类可以理解的方式解释自己的决策过程。
07 下一站路口
随着物理AI技术的成熟,整个自动驾驶行业的地图正在被重新绘制。传统的技术栈分层——感知、定位、规划、控制——可能不再适用。
在物理AI框架下,这些传统模块之间的界限将变得模糊。感知不再仅仅是识别物体和分割场景,而是理解物体的物理属性和动态行为;规划不再是简单地选择路径,而是基于物理约束和因果推理进行决策。
这些变化将重塑行业竞争格局。传统的汽车制造商、科技公司和初创企业将在一个新的竞技场上竞争,而这场竞争的胜败将取决于谁能够最有效地将物理理解融入AI系统。
梅赛德斯-奔驰的量产计划可能只是冰山一角。随着物理AI技术的成熟,更多车企将跟进,推动这项技术从高端车型逐步向主流市场渗透。
金道成立于1995年,是中国最具竞争力的桌面、应用和云计算运维服务商之一。金道近2000名服务工程师,分布在西安、贵阳、东莞、大连等地的离岸服务中心(ODC),以及客户数据中心和办公现场,为30多家世界500强客户提供安全、快速和优质的服务。
金道的使命:
以专业和快速的服务,保障客户ICT系统安全和连续地运行。
金道的业务:
借助流程、知识库和AI大模型,金道的专业技术人员为客户打造高安全、快交付和低成本的ICT服务。
云计算交付与运维:为云计算厂商和大客户提供云计算的建设、迁移、排障和变更服务,以及数据中心现场服务;
桌面运维:为客户的生产和办公系统提供7x24的咨询、排障和变更服务;
AI+数据:为连锁餐饮行业实现千客千面的智能菜单,大幅提升门店营收。
客户的期待,就是金道努力的方向!
高安全:认证合格工程师,严格管控流程和操作规范;
快交付:快速地部署与交付服务,支撑客户业务增长;
低成本:用AI替代人工,持续降低服务成本。
灵活的收费模式,可以按用量和利润分成的方式计价。
当梅赛德斯-奔驰宣布2026年底量产搭载新AI系统的车型时,全球工程师的目光都聚焦在这个工业与科技的交汇点上。
物理AI的真正突破不在于让车辆完成某个炫酷的演示,而在于让系统理解:为什么湿滑路面上要提前刹车,为什么弯道处要控制速度,为什么行人突然转身可能意味着风险。
当AI开始理解这些人类司机几乎本能掌握的物理常识时,自动驾驶的“最后一公里”才真正有了通车的可能。物理AI不是要让机器像人类一样思考,而是要让机器理解人类所在的这个物理世界的基本规则,并用这种理解来保障每一次出行的安全。
<END>




 10个月宝宝每天需要喝多少奶粉?
10个月宝宝每天需要喝多少奶粉?
