自动驾驶算法教材培训教材
日期: 2026年1月29日
引言
自动驾驶技术是人工智能、计算机视觉、传感器技术和车辆工程等多个领域交叉融合的产物,其核心在于一系列复杂的算法。本教材旨在系统性地梳理自动驾驶的关键算法体系,从环境感知、决策规划到控制执行,全面解析支撑车辆实现自主导航与驾驶的核心技术。本文档作为教材的总结部分,将对整个算法框架进行高度概括,并探讨其当前面临的挑战与未来发展趋势。
1. 自动驾驶技术的核心架构
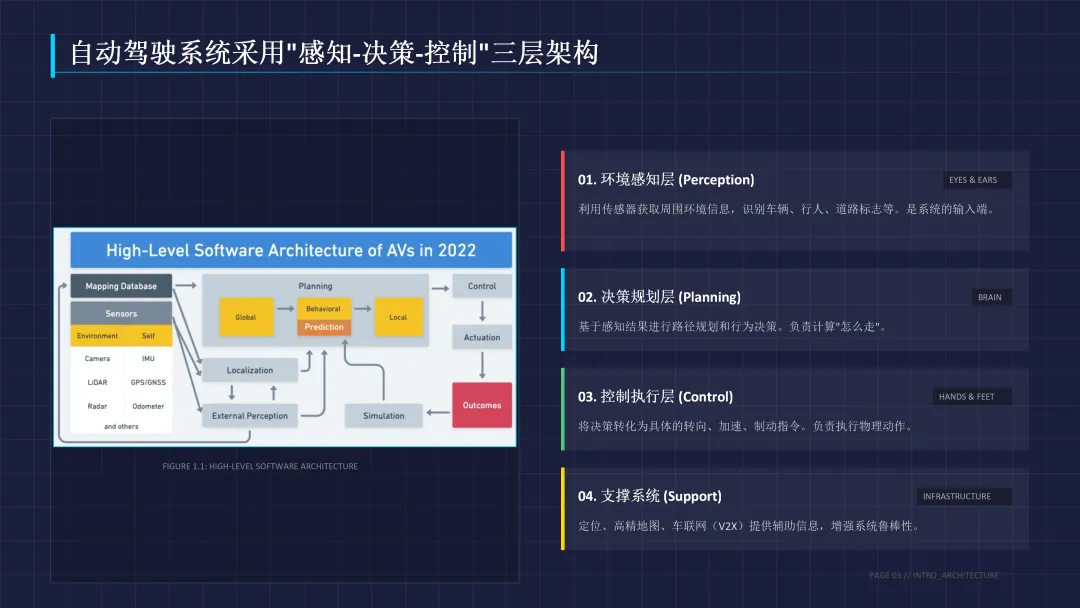
自动驾驶系统通常被设计为一个分层的架构,以实现从数据采集到车辆执行的完整闭环。这个架构主要包含三大核心模块,并由一系列关键技术提供支撑。
自动驾驶系统的本质是一个实时感知、决策和控制的循环过程。每个环节的算法性能直接决定了系统的整体安全性和可靠性。
核心模块 | 主要任务 | 关键技术点 |
环境感知(Perception) | 识别和理解车辆周围的环境,包括静态和动态物体。 | 目标检测、语义分割、多传感器融合、BEV感知 |
决策规划(Planning) | 基于感知结果,决定车辆的驾驶行为和行驶路径。 | 行为决策、全局路径规划、局部轨迹规划、轨迹预测 |
控制执行(Control) | 将规划好的路径和速度转化为具体的车辆控制指令。 | 横向控制(转向)、纵向控制(加减速)、轨迹跟踪 |
支撑技术:
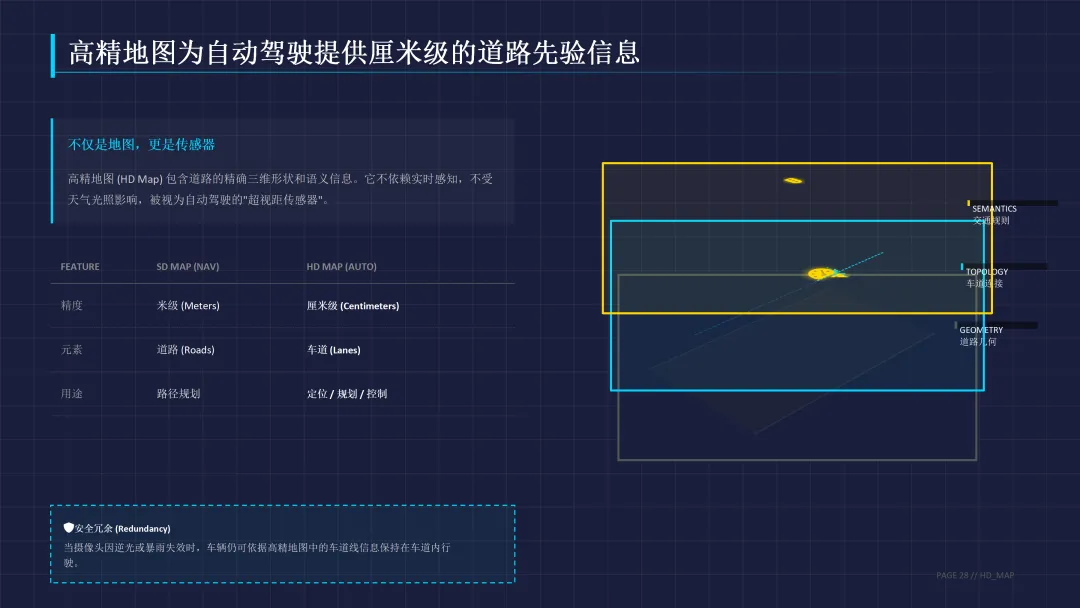
•高精地图(HD Map): 提供厘米级精度的先验道路信息,是实现高阶自动驾驶的重要保障。
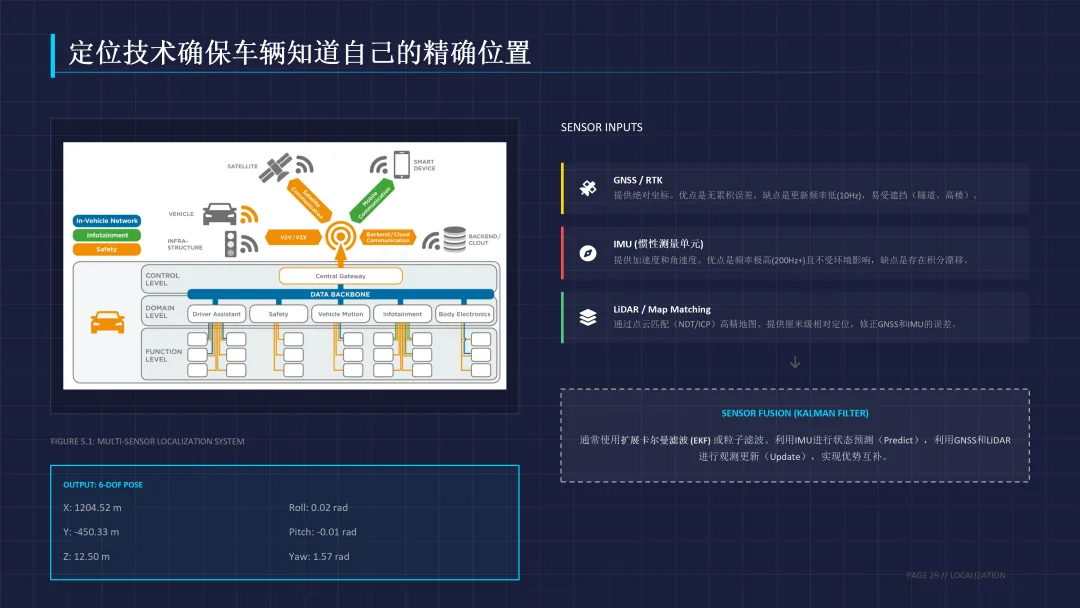
•定位(Localization): 结合GPS、IMU和传感器数据,实现车辆在地图上的精确位置和姿态估计。
•车联网(V2X): 通过车与车、车与路侧设施的通信,扩展车辆的感知范围,实现协同驾驶。
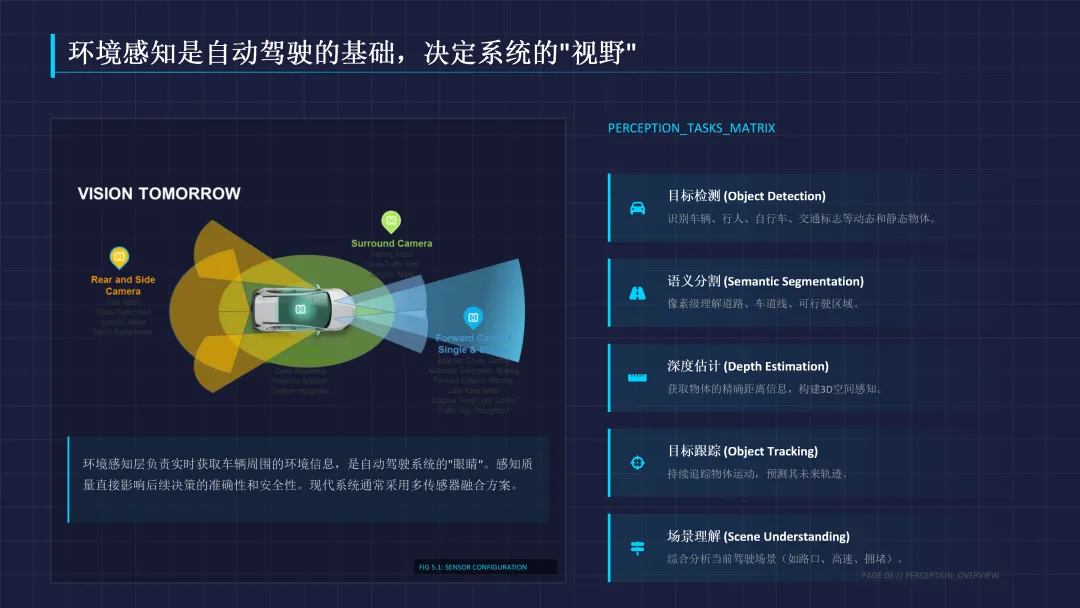
2. 环境感知算法详解
环境感知是自动驾驶系统与物理世界交互的入口,其目标是构建对周围环境的精确三维理解。这通常通过融合多种传感器数据来实现。
2.1. 传感器与数据
自动驾驶车辆通常配备多种传感器以实现冗余和互补:
•摄像头(Camera): 提供丰富的颜色和纹理信息,成本低,但受光照和天气影响大。
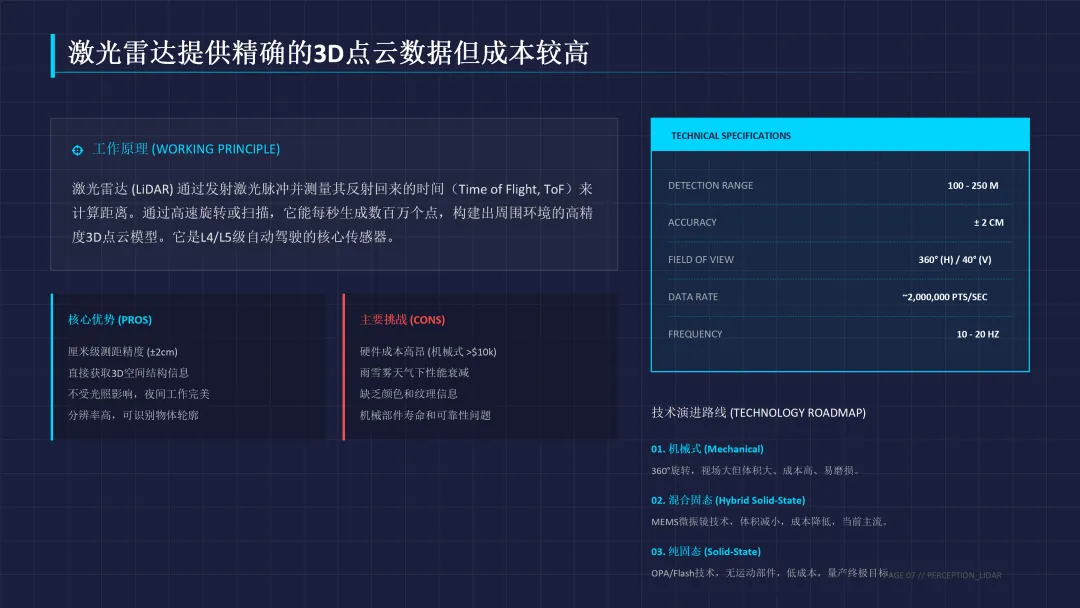
•激光雷达(LiDAR): 直接获取精确的三维点云数据,测距精度高,但成本昂贵且在恶劣天气下性能下降。
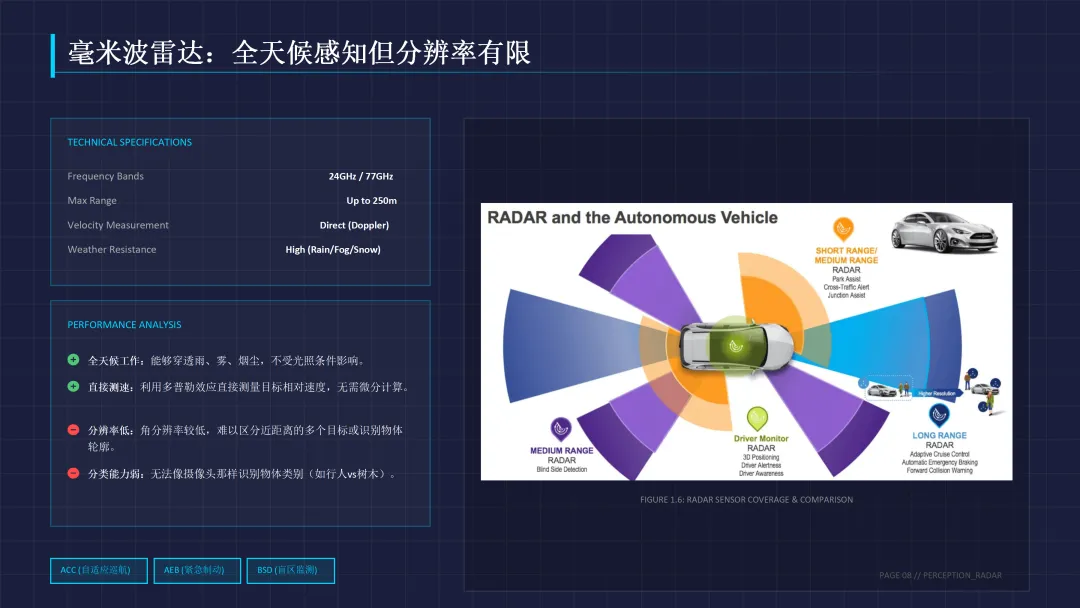
•毫米波雷达(Radar): 对速度敏感,穿透性好(不受雨雾影响),但分辨率较低。
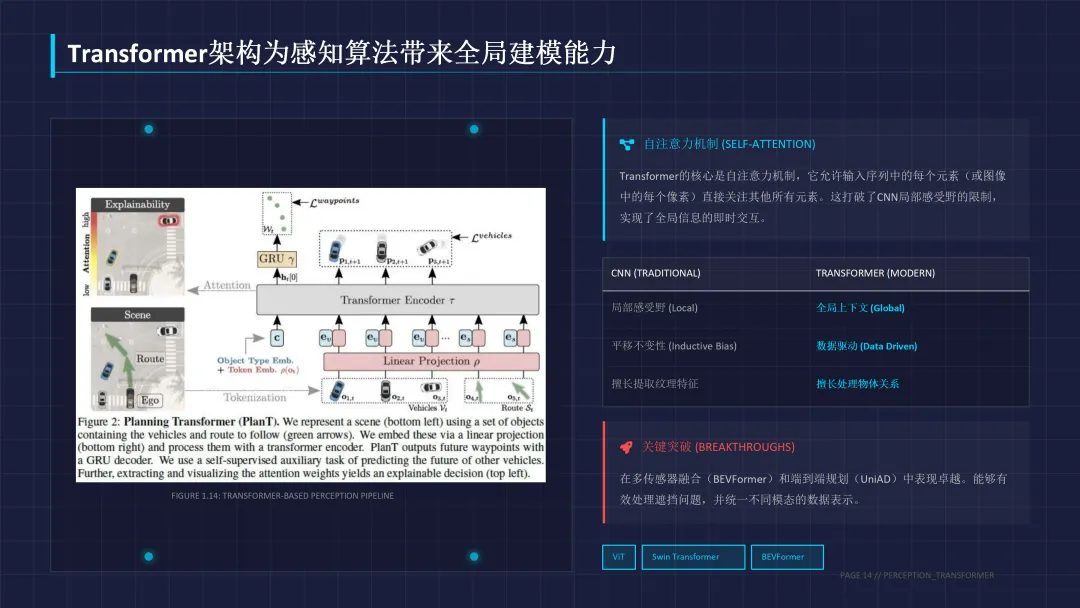
2.2. 核心感知算法
算法类别 | 目标 | 主流技术 |
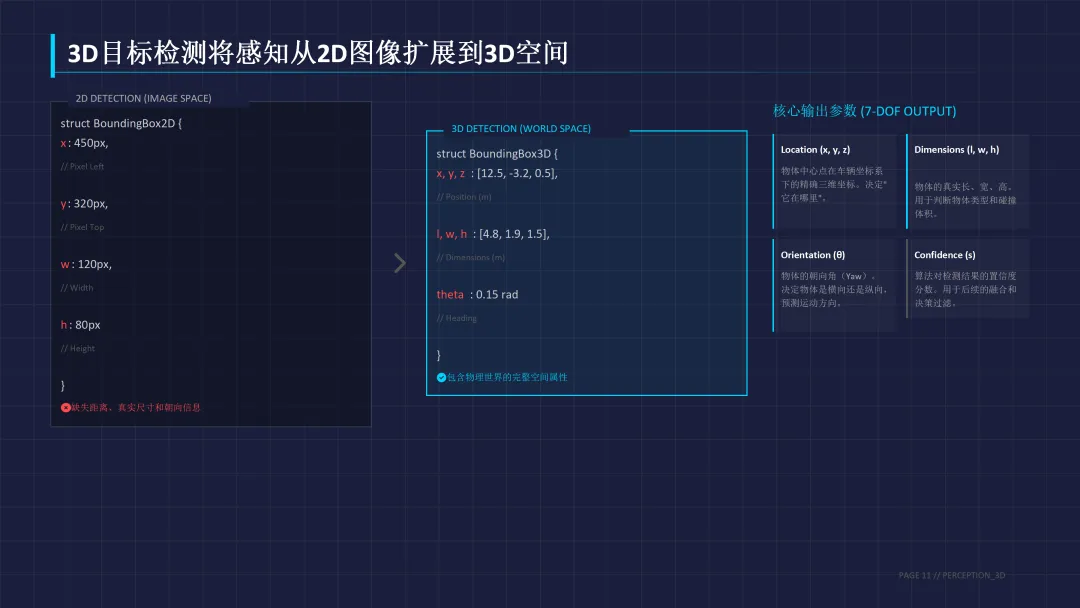
3D目标检测 | 在三维空间中识别车辆、行人、骑行者等物体的位置和尺寸。 | PointPillars, VoxelNet, MV3D (多模态融合) |
语义/实例分割 | 对图像或点云进行像素级或实例级的分类,以识别车道线、可行驶区域等。 | DeepLab系列, Mask R-CNN, U-Net |
BEV (鸟瞰图) 感知 | 将来自多个摄像头的图像转换为统一的鸟瞰图视角下的3D场景表示。 | LSS, BEVFormer, BEVDet |
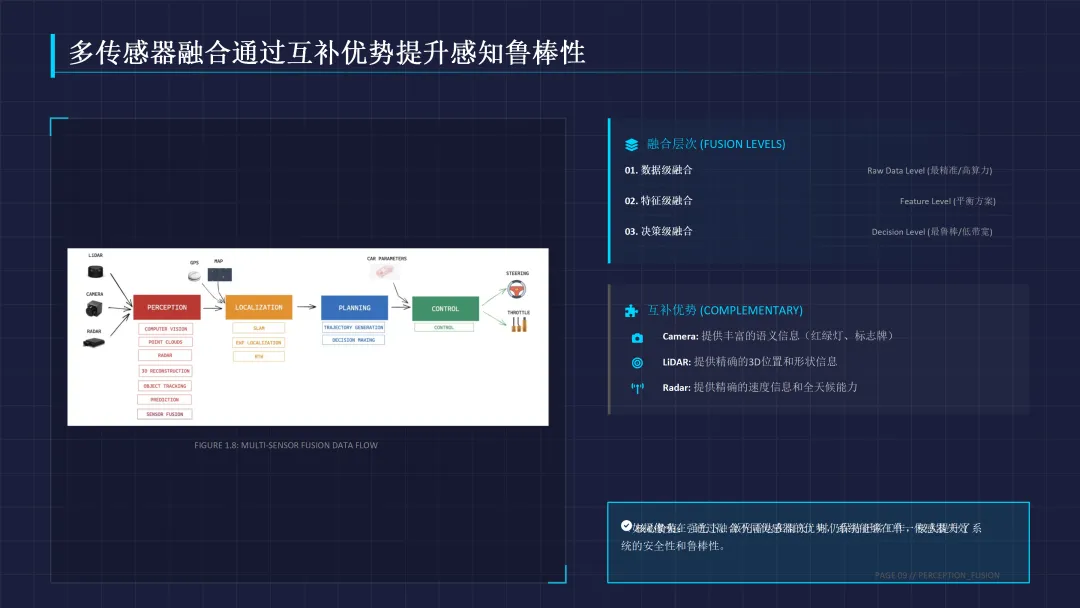
多传感器融合是感知算法的关键,通过卡尔曼滤波或深度学习网络将不同传感器的数据进行有效结合,以提供比任何单一传感器都更鲁棒和准确的环境模型[1]。
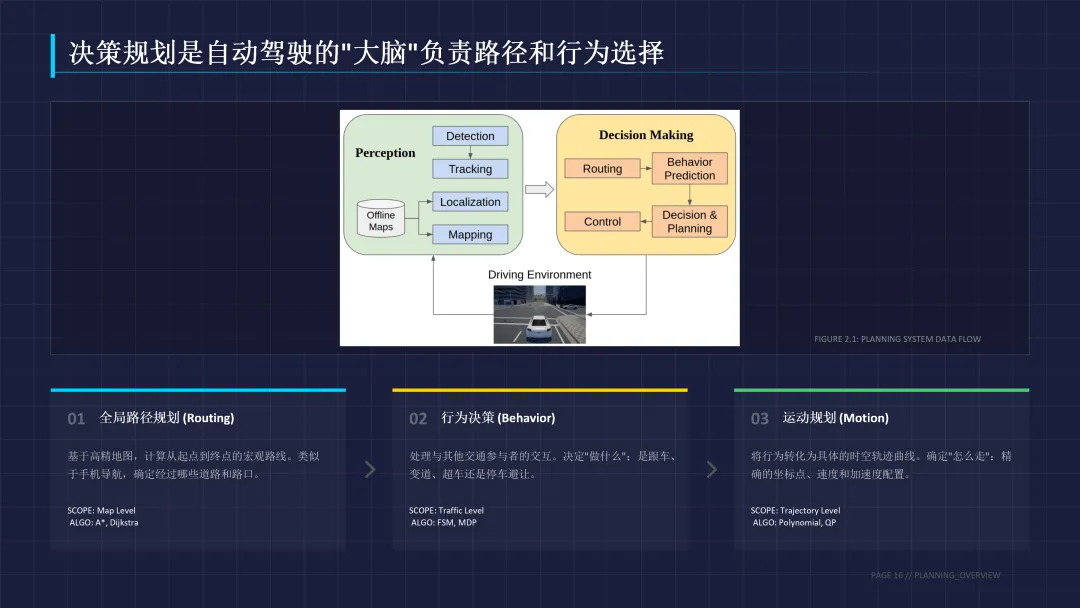
3. 决策规划算法详解
决策规划模块是自动驾驶的“大脑”,它根据感知结果和导航目标,计算出一条安全、舒适且高效的行驶路径。
3.1. 规划的层次化结构
规划过程通常被分解为三个层次:
1全局路径规划(Global Route Planning): 在高精地图上规划从起点到终点的宏观路径,类似于传统导航。常用算法包括A*和Dijkstra。
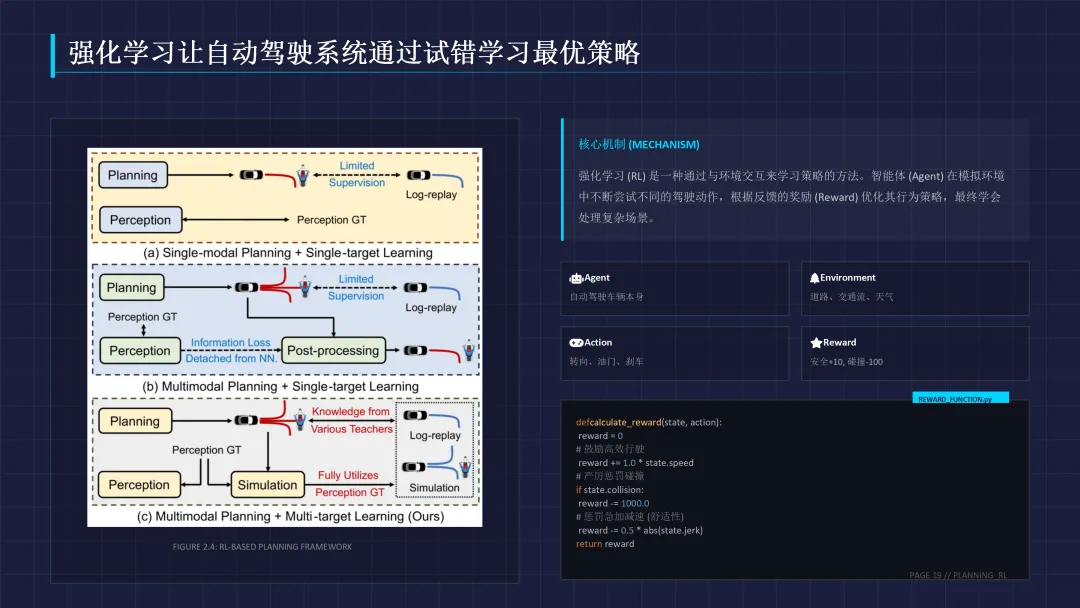
2行为决策(Behavioral Decision-Making): 在宏观路径的指引下,做出符合交通规则的战术决策,如换道、跟车或超车。有限状态机(FSM)和强化学习(RL)是常用方法。
3局部轨迹规划(Local Motion Planning): 生成一条具体的、可执行的、无碰撞的行驶轨迹(包含位置、速度、加速度等信息)。常用算法包括采样法(RRT*)、优化法(QP)和曲线插值法。
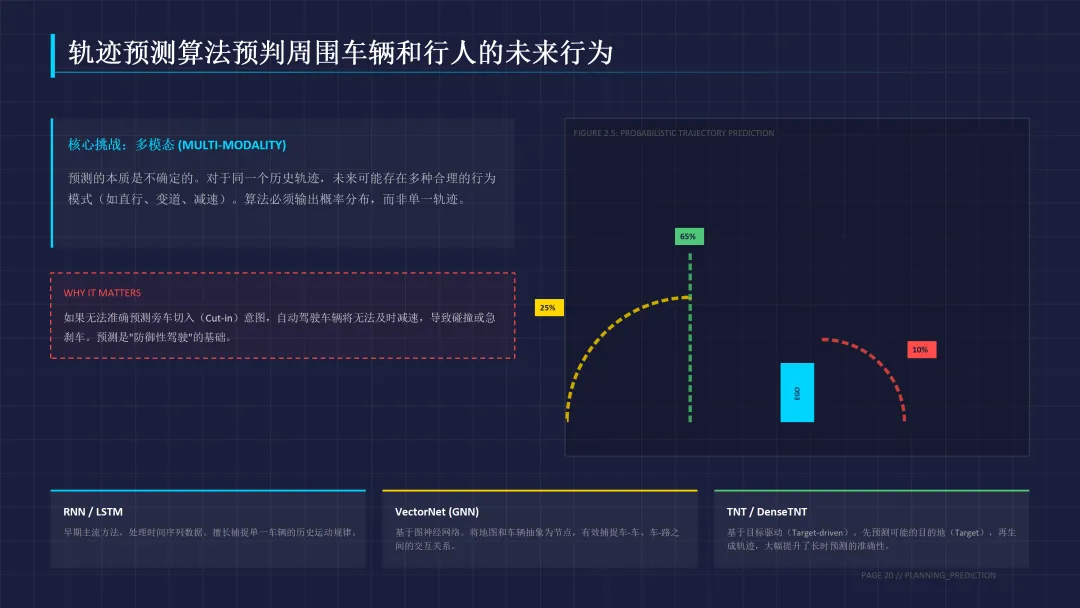
3.2. 轨迹预测
为了做出安全的决策,系统必须预测其他交通参与者(尤其是车辆和行人)的未来轨迹。基于学习的方法,特别是采用LSTM和Transformer网络的模型,已成为主流,它们能够更好地捕捉复杂的交互行为 [2]。
4. 控制执行算法详解
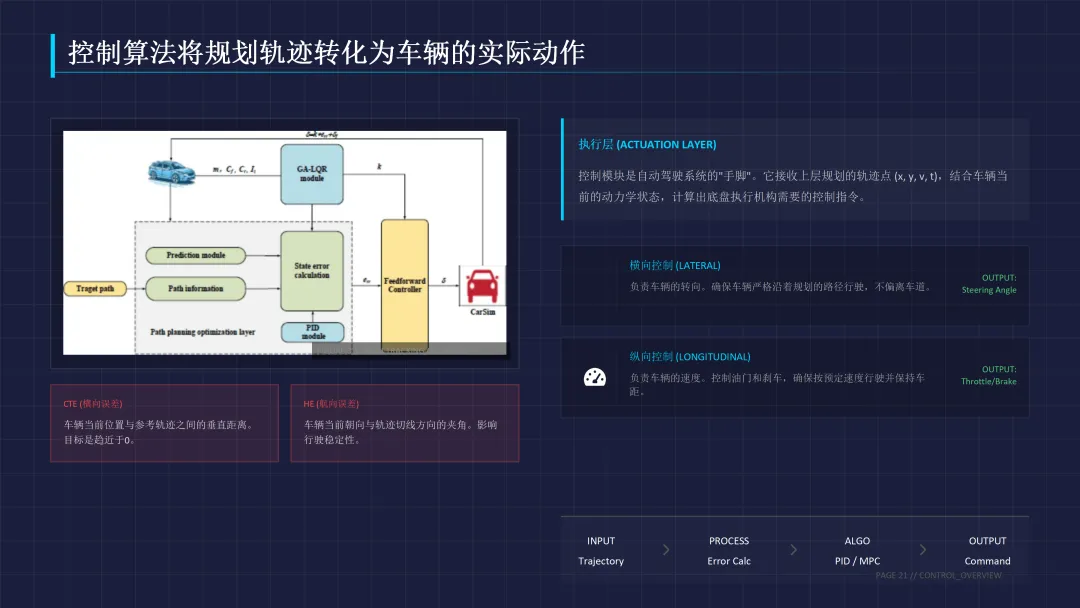
控制模块是自动驾驶系统的“小脑”和“神经系统”,负责精确执行规划模块输出的轨迹。
4.1. 横向与纵向控制
•横向控制(Lateral Control): 控制方向盘转角,使车辆沿目标路径行驶。
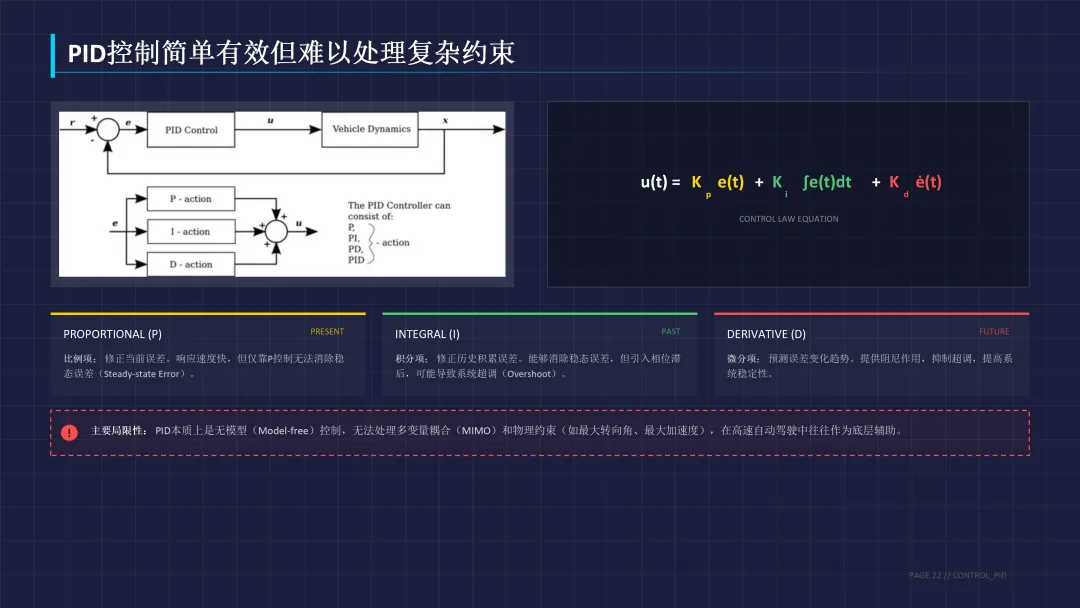
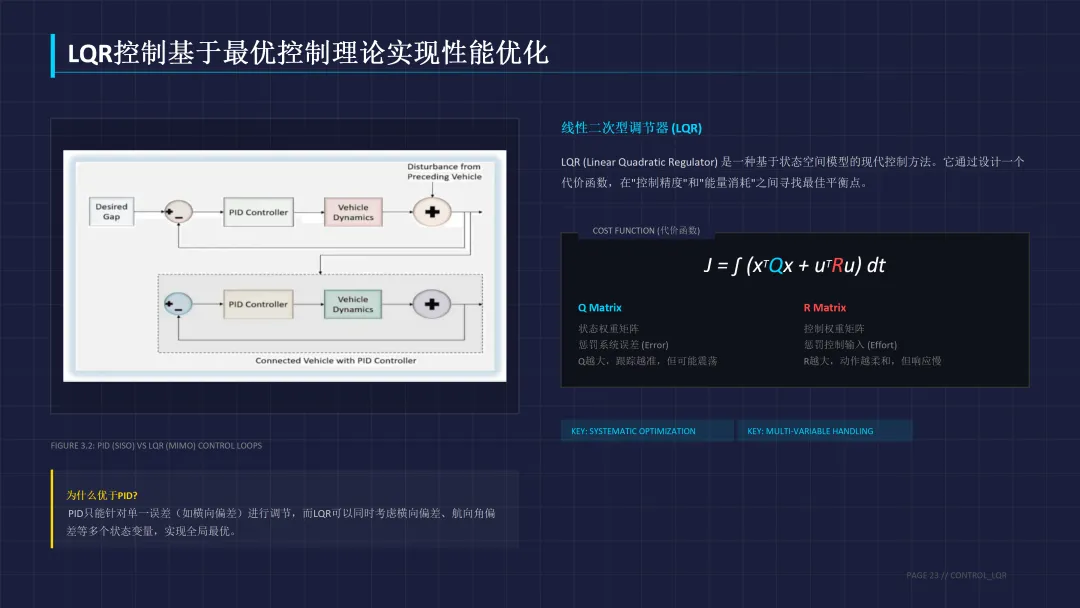
◦PID控制: 简单有效,但适应性差。
◦LQR (线性二次调节器): 基于最优控制理论,性能更优。
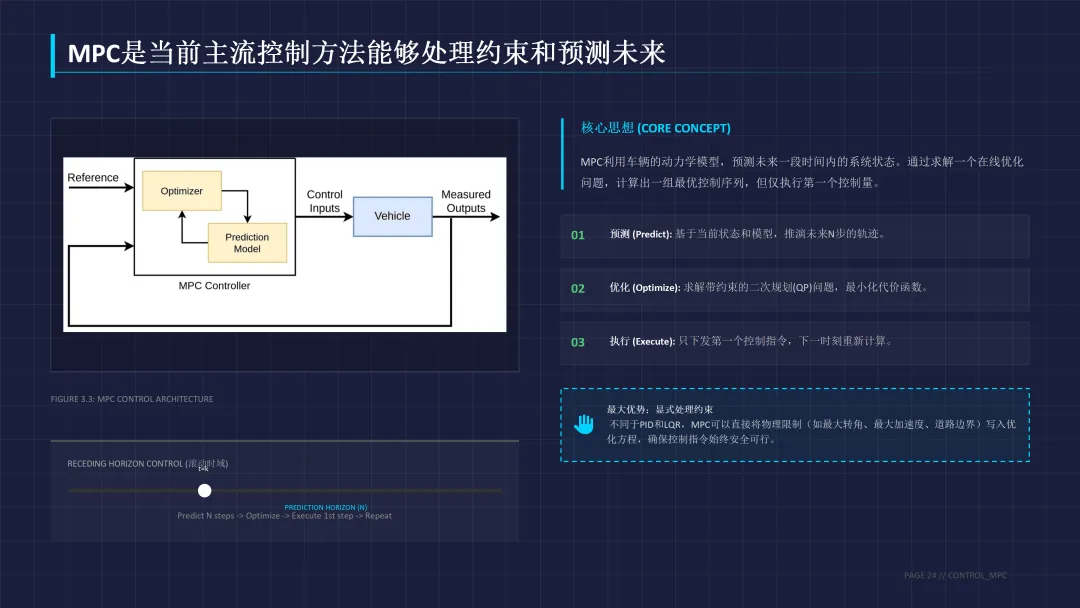
◦MPC (模型预测控制): 当前最主流的方法,它通过车辆动力学模型预测未来状态,并在线优化控制输入,能够显式处理车辆的物理约束,如最大转向角和加速度 [3]。
•纵向控制(Longitudinal Control): 控制油门和刹车,以达到目标速度或保持与前车的安全距离。
4.2. 轨迹跟踪
轨迹跟踪的目标是最小化车辆实际位置与规划轨迹之间的误差。MPC因其前瞻性和处理约束的能力,在轨迹跟踪任务中表现出色。
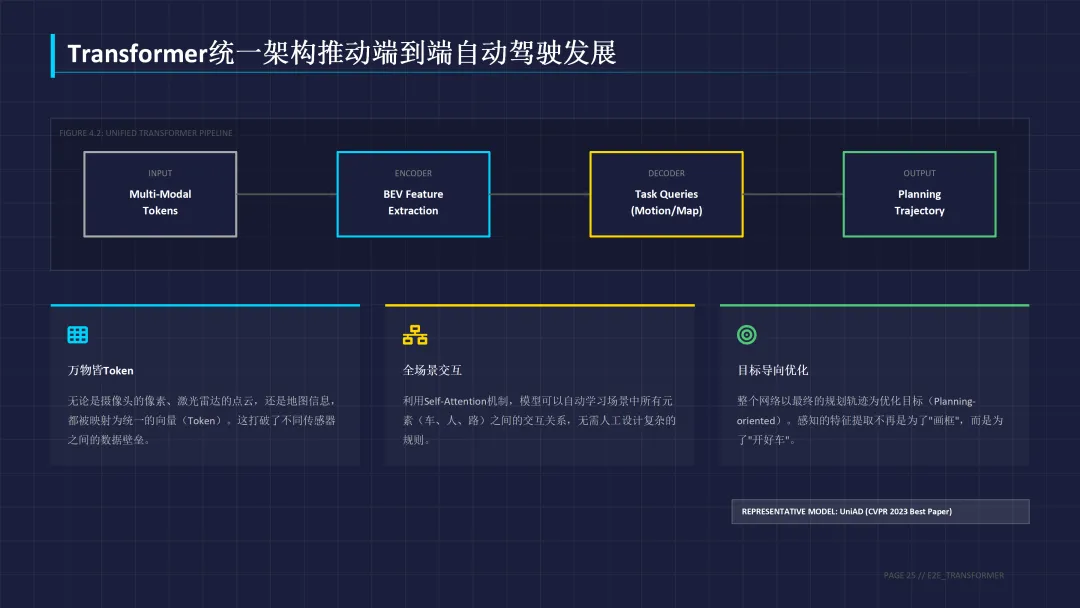
5. 前沿趋势:深度学习与端到端方法
近年来,深度学习的飞速发展正在重塑自动驾驶算法的范式,从传统的模块化设计转向更加整合的端到端学习。
前沿方向 | 核心思想 | 代表性技术 |
端到端自动驾驶 | 将感知和规划模块合并为一个单一的神经网络,直接从传感器输入映射到驾驶指令。 | NVIDIA PilotNet, UniAD |
世界模型(World Model) | 训练一个生成模型来模拟真实世界的动态演化,使AI能在“想象”中进行规划和训练。 | GAIA-1, DriveDreamer |
大模型(Foundation Models) | 利用视觉语言模型(VLM)等基础模型的常识推理能力,来理解复杂的交通场景和人类意图。 | GPT-4V, LLaVA for Driving |
这些新范式旨在解决传统模块化方法中误差累积和规则设计复杂的问题,通过大规模数据驱动的方式,让系统学习到更通用和鲁棒的驾驶能力[4]。
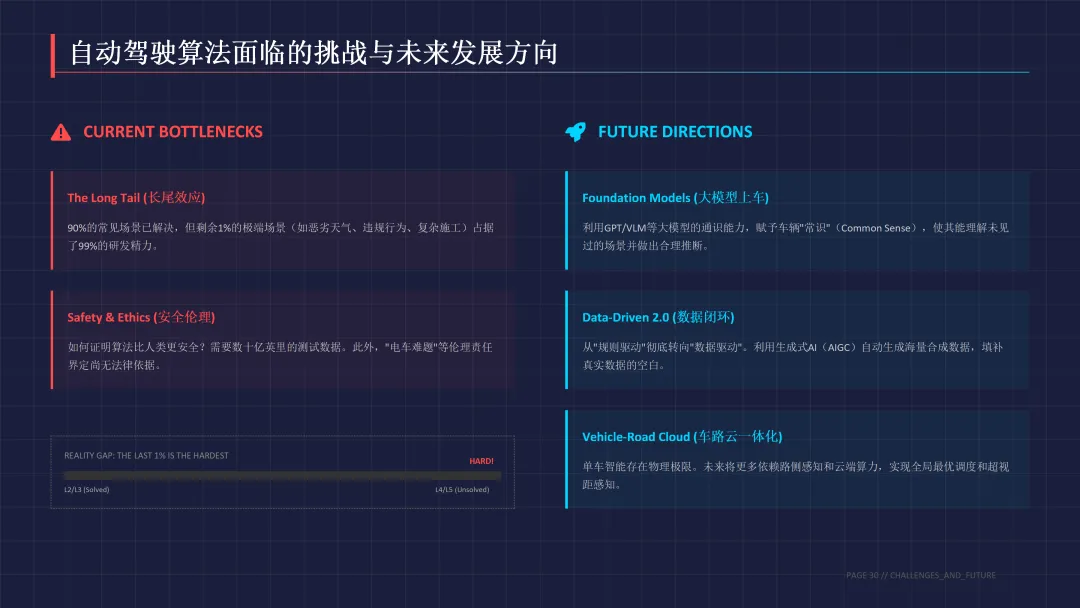
6. 挑战与展望
尽管自动驾驶技术已取得显著进展,但实现完全的无人驾驶(L5级别)仍面临巨大挑战:
•长尾问题(Long-tail Problem): 如何处理罕见但致命的极端场景(Corner Cases)是目前最大的技术瓶颈。
•安全验证: 如何在统计学上证明自动驾驶系统比人类驾驶员更安全,需要海量的测试里程和创新的验证方法。
•法规与伦理: 事故责任的界定、数据隐私以及“电车难题”等伦理问题尚待解决。
未来展望:
•数据闭环: 构建高效的数据收集、标注、训练和仿真验证的闭环系统,是推动算法迭代的关键。
•车路云一体化: 单车智能的局限性将通过V2X技术和云端计算得到弥补,实现全局协同智能。
•可解释AI: 提升决策过程的透明度和可解释性,是获得公众信任和进行问题追溯的前提。















 10个月宝宝每天需要喝多少奶粉?
10个月宝宝每天需要喝多少奶粉?
