特斯拉的FSD、Waymo的无人出租车、百度的Apollo......
当我们谈论自动驾驶时,脑海中浮现的往往是那些动辄千万美元研发投入、配备数十个激光雷达的"黑科技怪兽"。
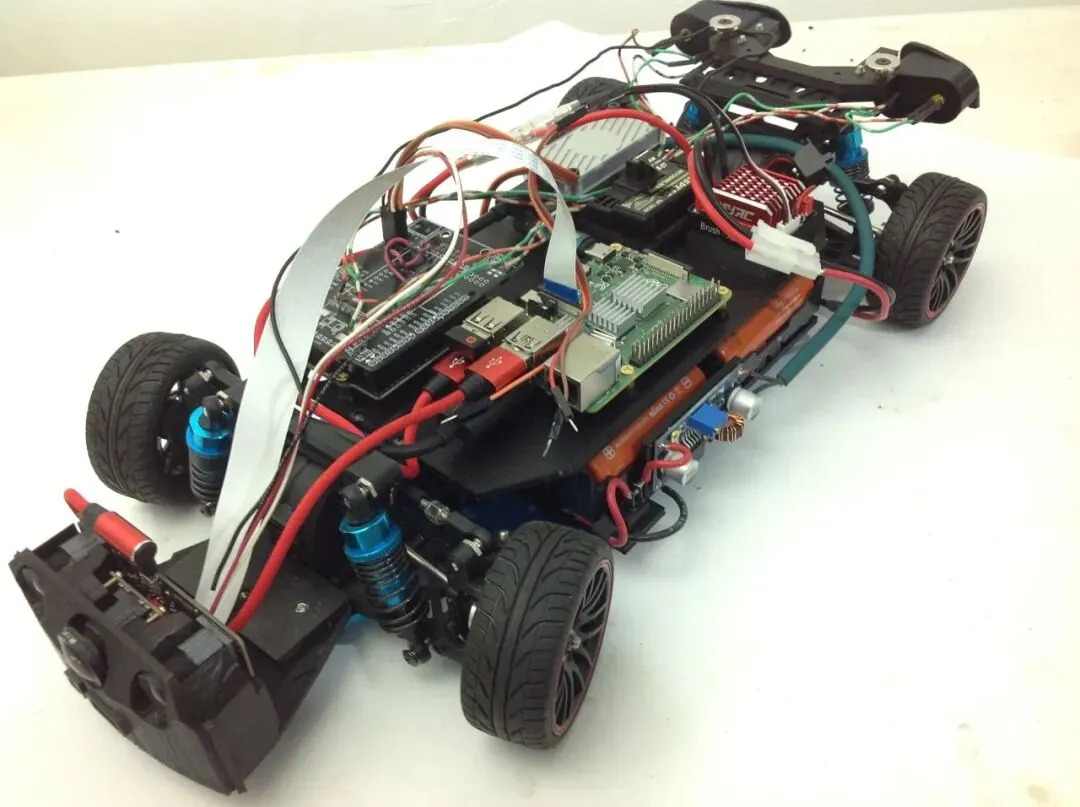
但如果我告诉你,一个人、一台树莓派、一对摄像头,就能从零打造一辆真正能自主行驶的AI汽车呢?
这不是科幻电影的情节,而是Instructables上一个真实存在的项目——AI Self Driving Car。
这个项目总共70个步骤,从3D打印外壳、组装底盘悬挂、焊接电路,到配置神经网络、调试视觉算法,事无巨细,全部开源。它斩获了Instructables竞赛的Grand Prize大奖。
更重要的是,它用事实证明了一个观点:
自动驾驶不是大公司的专利,它可以是每一个工程师的周末项目。
今天,让我们完整拆解这个项目,看看一个人如何在车库里复刻特斯拉的核心技术。
这个项目围绕“用 AI 让小车在道路环境中自主行驶”这一目标展开,把自动驾驶拆成可动手实现的工程闭环:通过摄像头等传感器获取环境信息,利用算法完成道路/路径理解与转向决策,并把决策结果转换为电机控制信号驱动车辆稳定行驶;整体强调自动驾驶的核心链路——感知 → 决策 → 控制 → 迭代调参/优化,用小车形态把自动驾驶系统的基本框架跑通。
2.1 纯视觉方案
当大多数自动驾驶项目都在堆砌激光雷达时,这个项目选择了一条更难但更有价值的路——纯视觉方案。
这与特斯拉的技术路线不谋而合。马斯克曾多次强调:"人类只用两只眼睛就能开车,为什么机器需要激光雷达?"
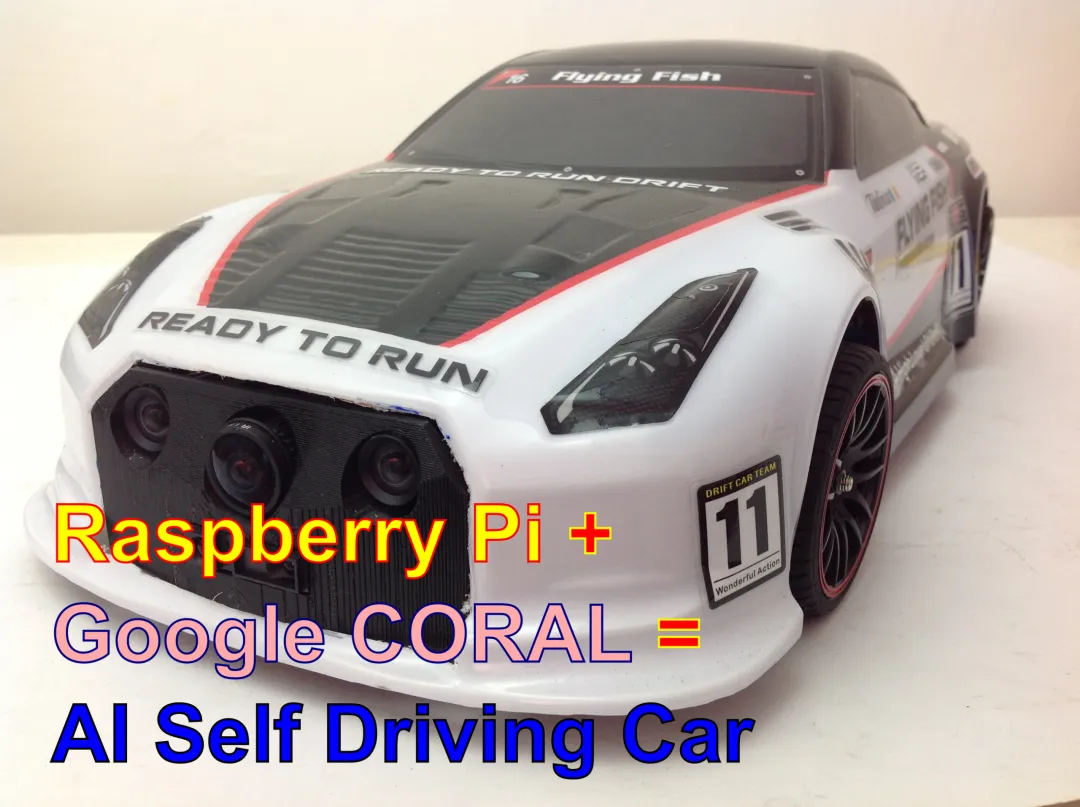
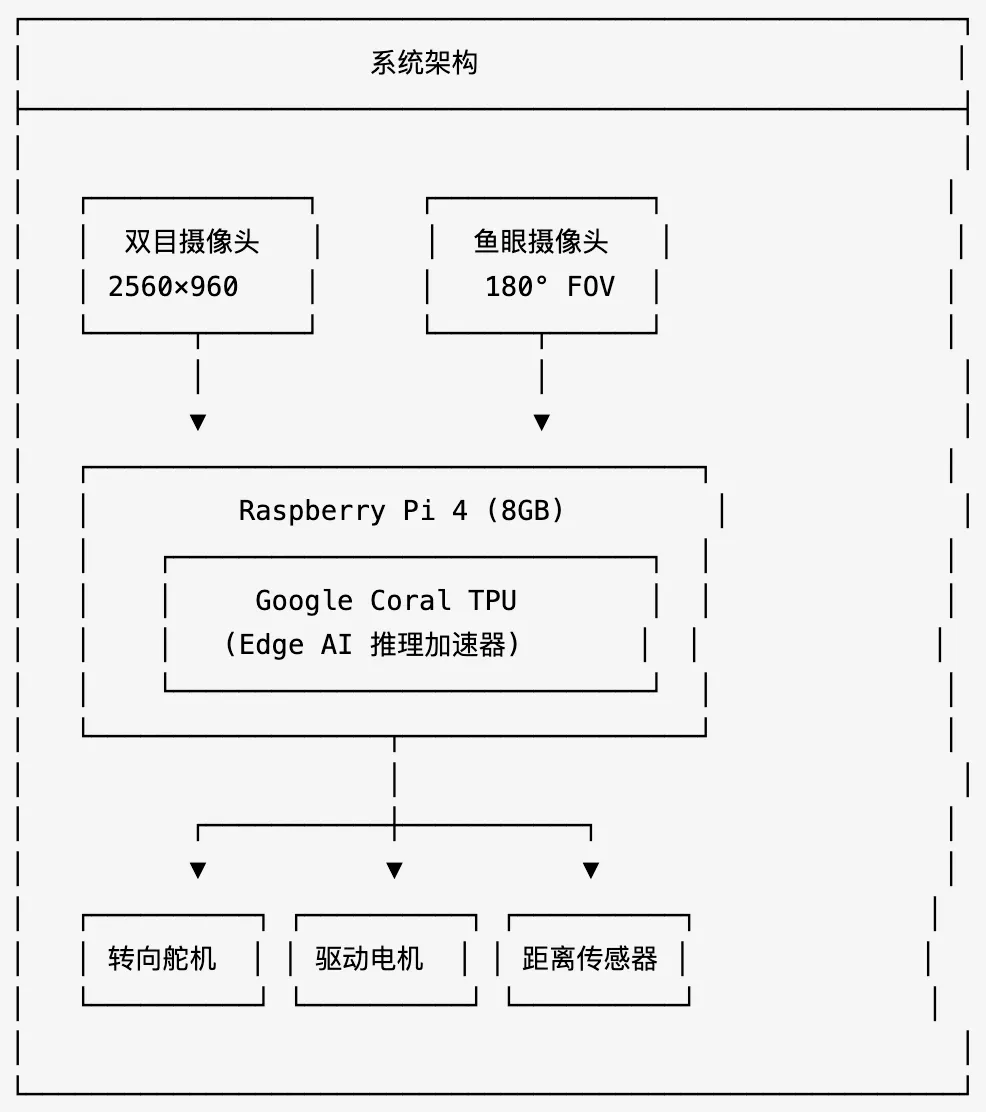
本项目使用双目立体摄像头实现深度感知,搭配180°鱼眼镜头扩大视野范围,再通过OpenCV进行实时车道检测和障碍物识别。
2.2 边缘计算:真正的实时推理
自动驾驶对延迟的要求极高——100毫秒的延迟,在高速行驶时就意味着2.8米的"盲区"。
为了实现真正的实时推理,项目引入了Google Coral USB加速器。这颗Edge TPU协处理器可以在树莓派上实现每秒数百帧的神经网络推理,而功耗仅有2W。
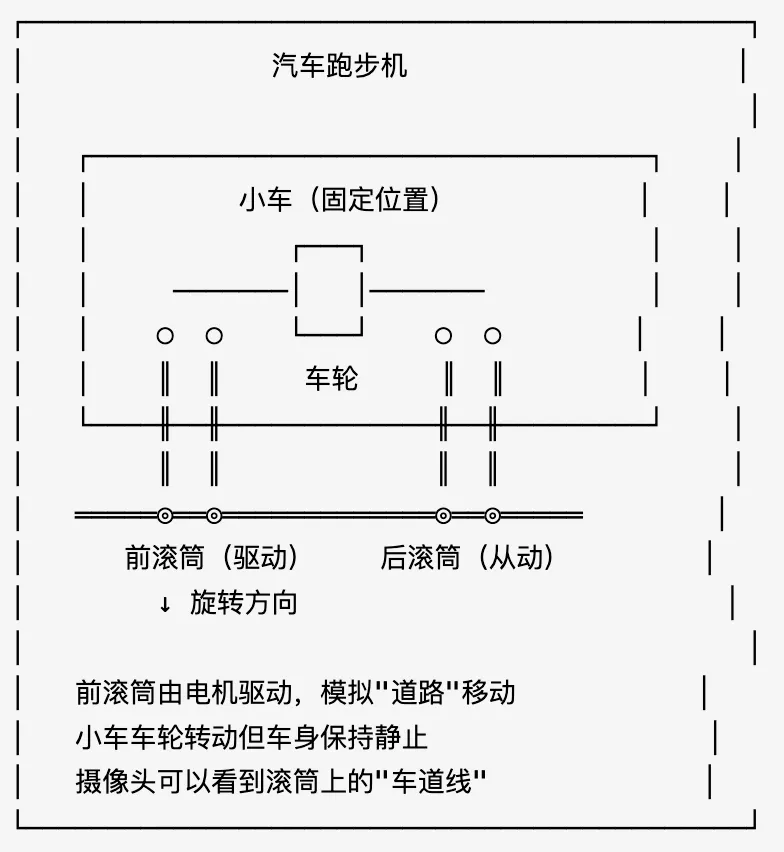
2.3 完整的工程闭环:连测试平台都自己造
这个项目最令人佩服的地方,是它的工程完整性。
自动驾驶开发有一个核心痛点:你不可能在真实道路上无限制地测试。特斯拉有影子模式,Waymo有模拟器,而这位作者的解决方案更加硬核——自己造一台跑步机。
没错,项目包含一个完整的汽车跑步机设计:
这种"没有条件创造条件也要上"的工程师精神,才是这个项目真正的灵魂。
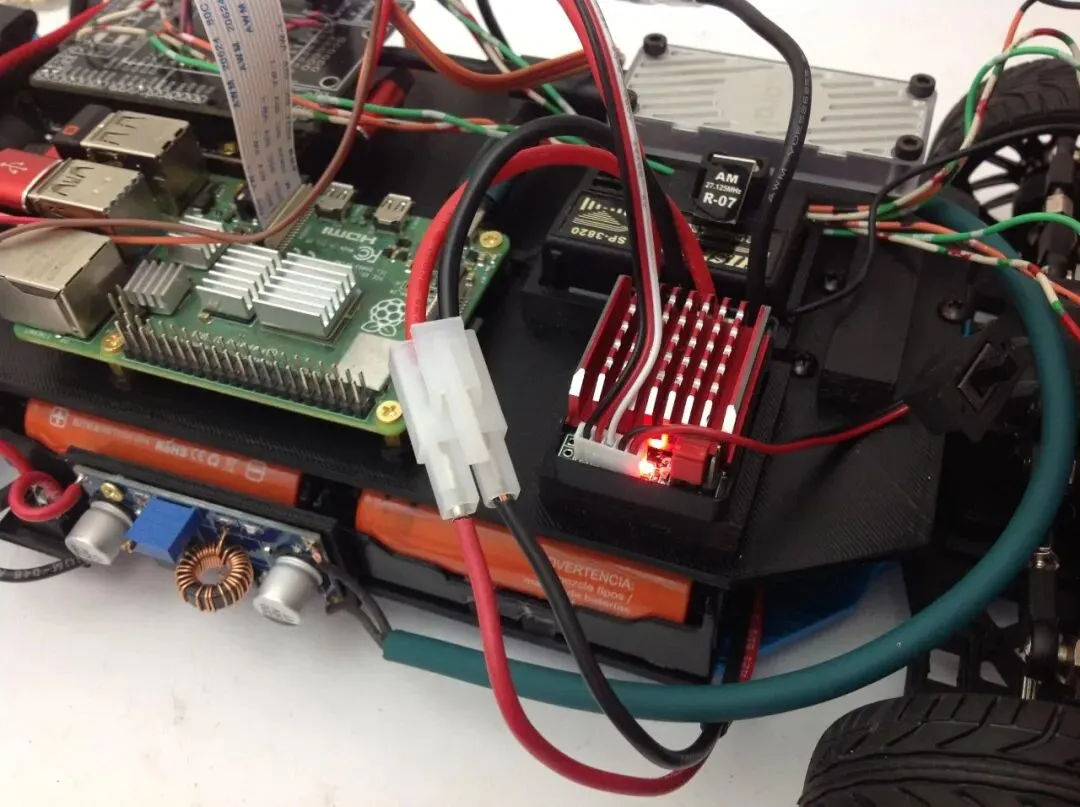
3.1 核心电子元件
| | |
|---|
| 主控制器 | | |
| AI加速器 | Google Coral USB Accelerator | |
| 主摄像头 | | |
| 广角摄像头 | | |
| 辅助控制器 | | |
| 距离传感器 | | |
| 驱动电机 | | |
| 转向系统 | | |
| 电源 | | |
3.2 为什么选择这些硬件?
树莓派4 vs Jetson Nano
很多人可能会问:为什么不用Nvidia Jetson Nano?毕竟它有专门的GPU。
答案是:Coral TPU + 树莓派的组合在性价比上更优。
而Jetson Nano开发套件更贵些,且功耗更高、散热更难。树莓派方案的模块化设计也更便于维护和升级。
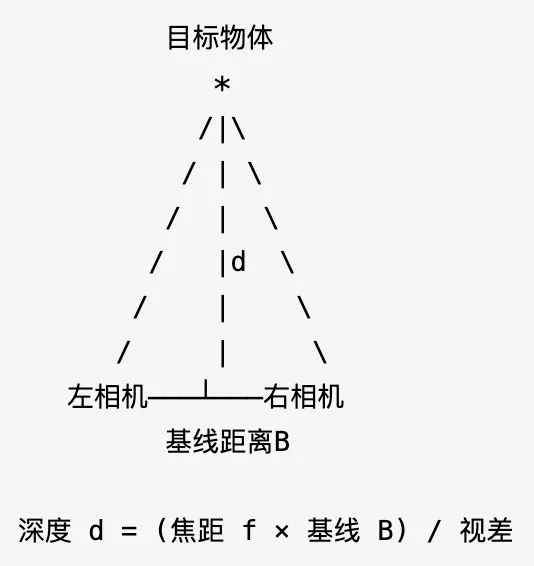
双目摄像头 vs 单目+深度学习
双目视觉通过三角测量直接计算深度,物理原理简单可靠:
相比单目深度学习方案,双目视觉:
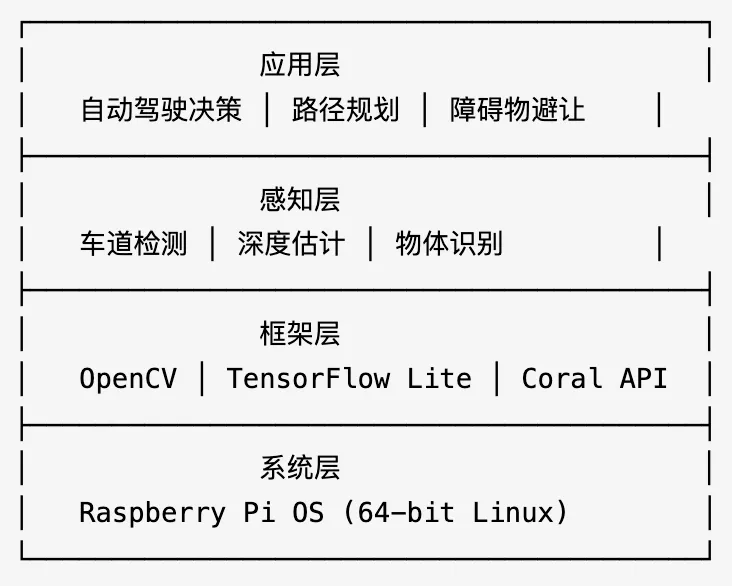
4.1 技术栈概览
4.2 核心算法模块
1. 车道检测(Lane Detection)
基于OpenCV的经典流水线:
2. 深度感知(Depth Perception)
双目立体匹配算法:
3. 实时推理(Real-time Inference)
Google Coral加速的物体检测:
- 模型:MobileNet SSD(针对边缘设备优化)
5.1 3D打印零件清单
5.2 后处理技巧
作者推荐的3D打印后处理流程:
- 热熔螺母嵌入:使用烙铁将M3热熔螺母嵌入打印件,比自攻螺丝更牢固
- 打磨和喷涂:提升外观质量
- 多次试装:确保公差合适
这是整个项目最具创意的部分——为小车专门打造的"健身房"。
6.1 设计理念
自动驾驶开发的核心挑战之一是测试:
6.2 工作原理
6.3 优势
- 安全:车身固定,不会撞坏
- 可控:速度精确可调
- 可重复:相同条件下反复测试
- 省空间:不需要大型测试场地
- 低成本:几百块钱搞定

本项目仅为一些总结分析,原文介绍完整,步骤繁多,想要了解更多可点击“阅读原文”查看,获取更多项目细节。
| |
|---|
| 完整性 | |
| 创新性 | |
| 可复现性 | |
| 性价比 | 总成本约¥2000-3000,低于市面任何同级方案 |
| 教育价值 | |
| 工程思维 | |
如果你打算复刻这个项目,这里有一些建议:
8.1 分阶段实施
第一阶段:遥控车(1-2周)
第二阶段:视觉采集(1周)
第三阶段:算法开发(2-4周)
第四阶段:测试优化(持续)
8.2 常见问题
1886年,卡尔·本茨发明了第一辆汽车。
2024年,一个普通工程师在车库里造出了自动驾驶汽车。
这中间隔了138年,但技术民主化的速度正在以指数级加快。
当特斯拉、Waymo、百度在自动驾驶赛道上投入数十亿美元时,这个项目用不到3000元人民币证明了:核心技术并不神秘,阻止普通人进入的从来不是技术门槛,而是信息壁垒。
这70个步骤,不仅仅是一份造车教程,更是一份打破信息壁垒的宣言。
它告诉每一个对自动驾驶好奇的工程师、学生、爱好者:
你不需要等待巨头的施舍,你可以自己动手,从零开始,理解并掌握这项改变世界的技术。
这,才是开源精神最动人的地方。
免责声明:本篇所发布的内容主要经 AI 整理、翻译国外技术网站与开源社区,版权归原作者所有,图片摘自原文,本文仅用于学习交流。如涉及侵权,请联系我们删除或更正。
项目原文(或点击“阅读原文”):
https://www.instructables.com/AI-Self-Driving-Car/





 10个月宝宝每天需要喝多少奶粉?
10个月宝宝每天需要喝多少奶粉?
