本节开始介绍雷达前端算法,即雷达如何配置。
首先这里推荐两本书:FMCW Radar Design 和 Radar Signal Processing for Autonomous Driving
1、FMCW测距
假设 Tx 信号是正弦连续波 (CW),其公式如下:x(t)=Acos(2πft)
A是振幅,f是频率。如果所有这些能量都消失在空旷的天空中,就不会有返回信号。但是,如果在照射区域内有一个物体,例如建筑物墙壁,那么返回信号就会是:y(t)=Arcos[2πf(t−τ0)]=Arcos[2πft+ϕ]
这里,Ar是(现在非常弱的)回声信号的幅度,τ0是雷达与目标之间往返过程中产生的延迟。此参数包含有关目标距离的所有信息d0在其相位中,因为我们可以从上面的表达式写出:ϕ=−2πf*τ0,或τ0=−ϕ*f/2π
从上可以看出,d0是发射端和接收端之间的距离,由于波在传输过程中来回传播,距离增加了一倍。时间延迟τ0那么等于2d0/c,c是电磁波的速度:ϕ=−2πf2d0/c=−4π*d0/λ。λ是雷达的工作波长。
由此可估算距离:d0=λϕ/4π
负号已被删除,因为它是由延迟引起的,并且与距离无关。但是这种技术对于测距不起作用,因为正弦波是周期性的,其周期为2π。因此,阶段φ仅在范围内明确(−π到+π)。对于实际的无线电频率(毫米波雷达频段)来说,这个距离最多只有几厘米。
- 连续波雷达无法测量目标的距离。如前所述,未调制的连续波接收的相位 ϕ 仅在 −π 到 +π 范围内不模糊,因为混频器输出具有周期性,周期为 2π。由于没有时间或频率标记,因此无法区分例如第 100 个周期和第 105 个周期;
- 返回信号幅度 Ar 比发射信号幅度 A小几个数量级。在混频和模数转换过程中,Ar几乎被发射信号淹没。需要通过精心设计以最大程度地减少泄漏(单站)或物理上分离的天线(双站)来实现两者之间的分离。
- 使用简单的连续波 (CW) 来对抗加性噪声更加困难。带内噪声无法滤除,会对相位和频率估计产生不利影响。事实上,频率估计算法会受到信噪比 (SNR) 阈值效应的影响:低于某个信噪比时,均方误差会迅速增加。
- 在多径环境中,此类信号的多个副本之和具有相同的频率,但相位会因相量相加而发生旋转。调制连续波(CW)可以更好地处理多次反射,这一点我们稍后会看到。
- 区分雷达周围的多个目标非常困难,因为来自不同物体的返回波形相互重叠,其效果类似于多径环境,会扭曲相位并导致测距信息丢失。
- 连续波的频谱是单个窄脉冲。因此,它更容易受到其他传输的干扰。
线性调频脉冲是一种频率呈线性变化的信号。因此,该过程被称为线性调频 (LFM)。
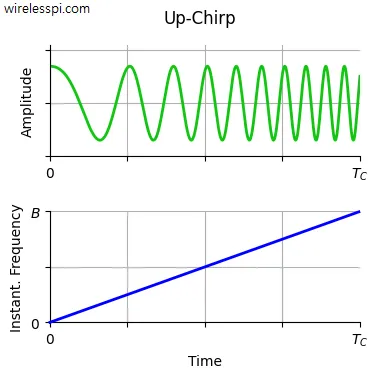
图1 Up Chirpx(t)=ej(πμt(2)+2πft+θ),其中μ=B/Tc
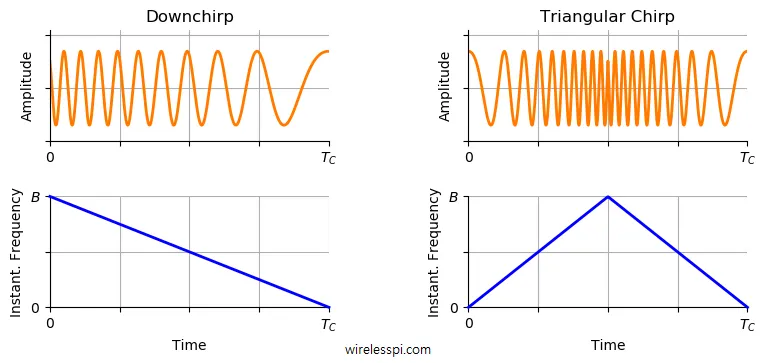 图2 Down Chirp and Triangular Chirp
图2 Down Chirp and Triangular ChirpFMCW 雷达发射频率调制的 CW 波形,假设单个目标距离为 d0,则返回的回波是同一信号的延迟版本。延迟回波绘制在下图的 Tx 时间线上。请注意,这不是实际波形,而是频率与时间的关系图,波形中的延迟 τ0也会引入频率差 fb,称为拍频或中频 (IF)。
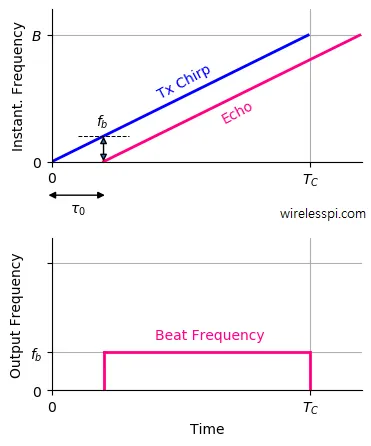 图3 FMCW 差频测距
图3 FMCW 差频测距fb=μ*τ0,τ0=2d0/c,μ=B/Tc
fb=μ*2d0/c, 或者 d0=c*fb/(2μ)=c*Tc*fb/(2B)
舍弃频率与时间的关系图,参考实际波形。延迟回波与Tx Chirp混合产生输出,y(t)=expj(2πfbt+ϕ)
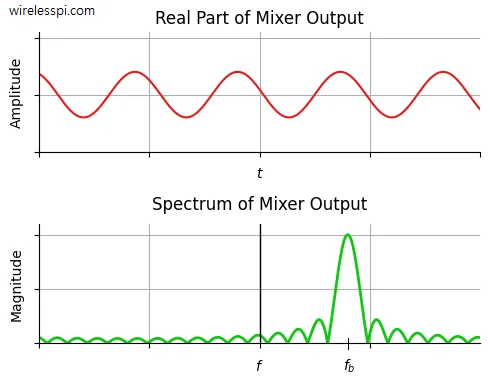 图4 混频后输出信号
图4 混频后输出信号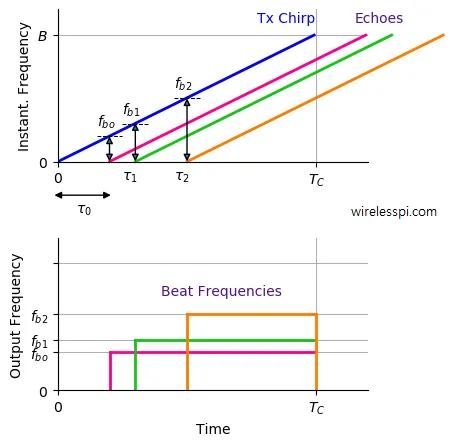 图5 multiple echos
图5 multiple echosy(t)=expj(2πfb0t+ϕ0)+expj(2πfb1t+ϕ1)+expj(2πfb2t+ϕ2)
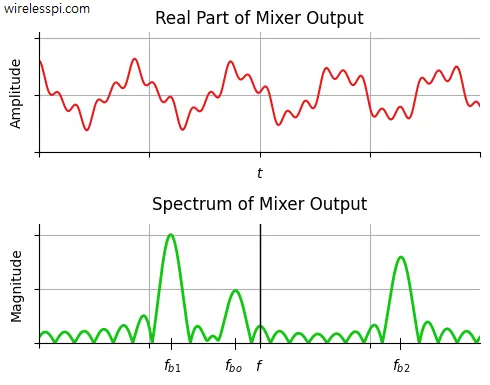 图6 multiple echos
图6 multiple echos整个测距过程现在可以概括为下图所示。由于频域与测距轴可互换,因此用距离轴表示。
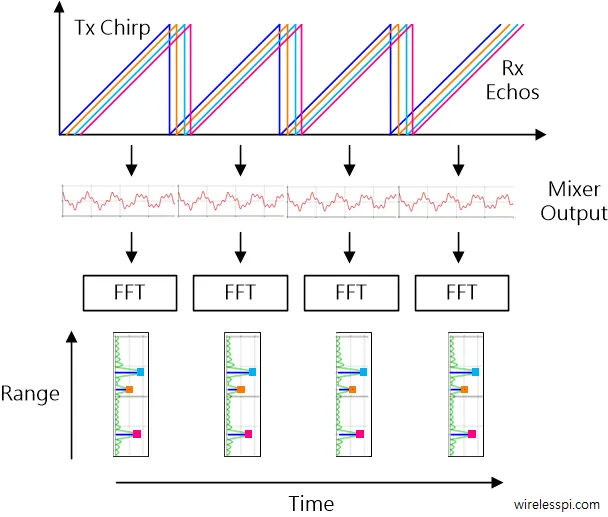 图7 multiple Chirp echos
图7 multiple Chirp echosRef:https://wirelesspi.com/fmcw-radar-part-1-ranging/
Ref:https://www.ti.com/content/dam/videos/external-videos/en-us/2/3816841626001/5675916489001.mp4/subassets/Mmwave_webinar_Dec2017.pdf
从以上的论述可以总结以下几点(fb=μ*2d0/c, 或者 d0=c*fb/(2μ)=c*Tc*fb/(2B))
- 最大测量距离依赖雷达方程,但是FMCW设计最大测距和Chirp设计相关,这个设计值一般小于雷达方程中的最大作用距离;
- 在雷达设计带宽固定的情况下,调制斜率越大,相同距离目标在频域上的距离越大。
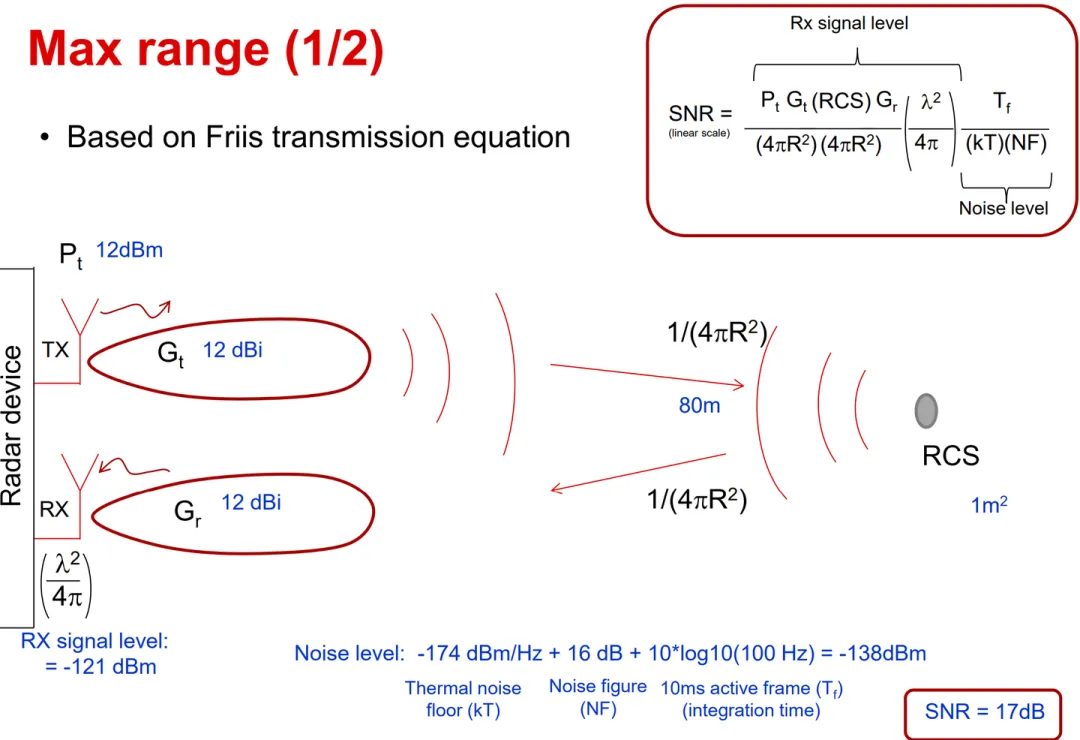
图8 雷达方程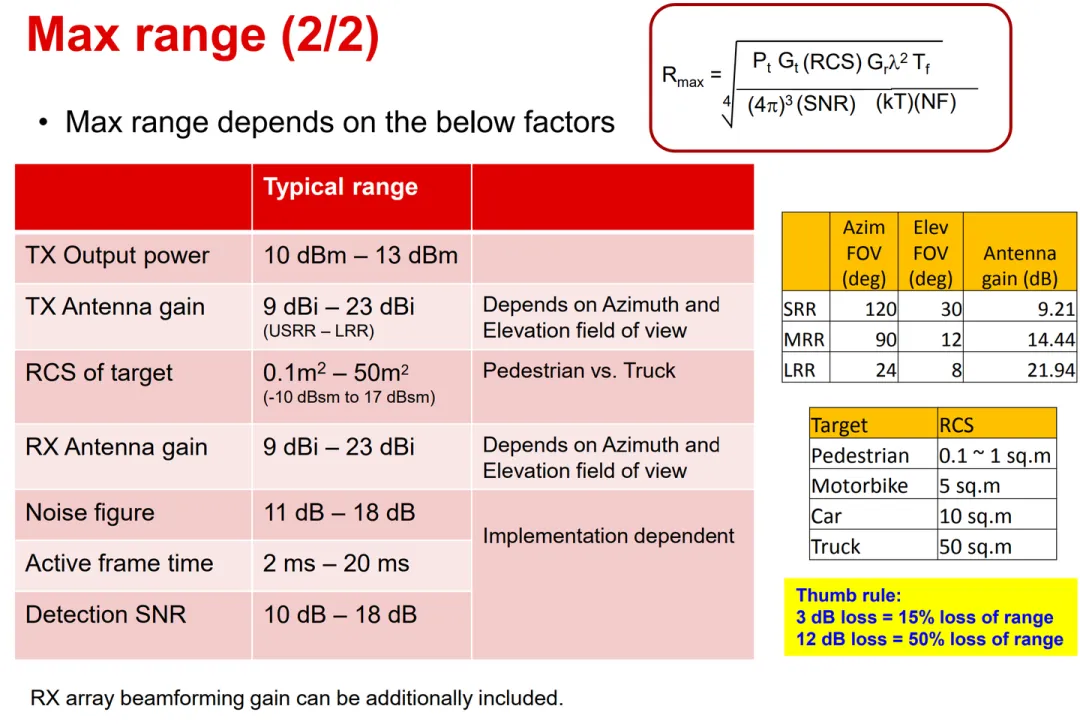 图9 雷达最大作用距离的依赖项
图9 雷达最大作用距离的依赖项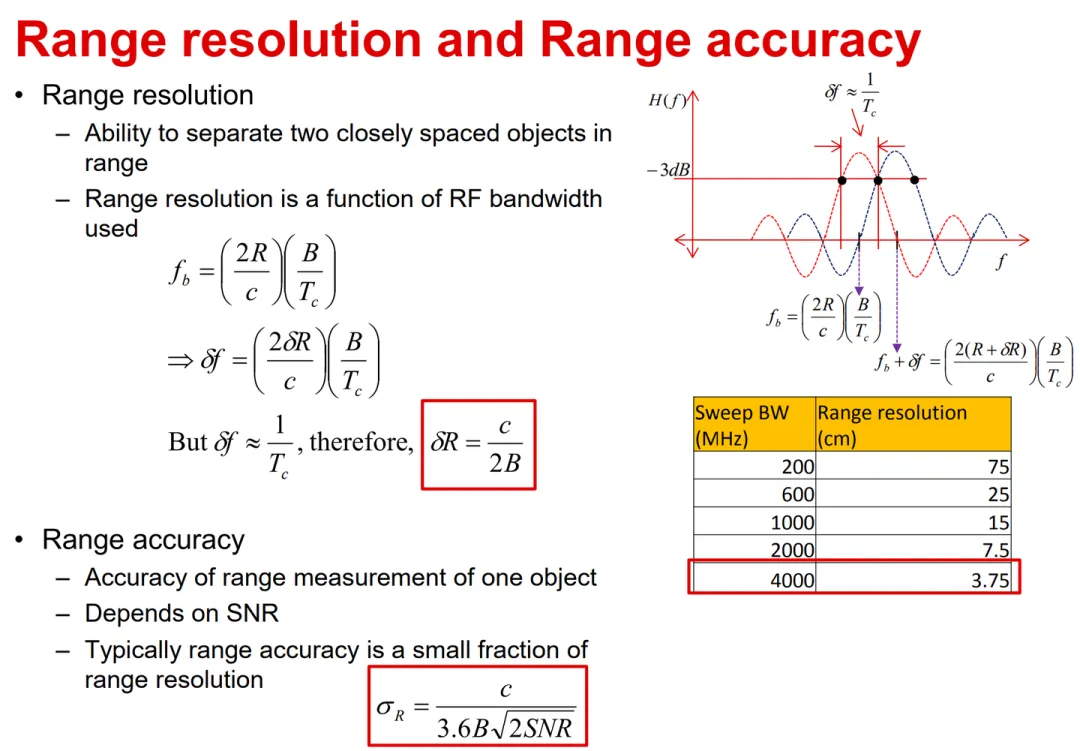 图9 雷达测距分辨率和精度
图9 雷达测距分辨率和精度 图10 Effect of the modulation slope on the beat frequency separation
图10 Effect of the modulation slope on the beat frequency separation2、Sawtooth Chirp(UpChirp or DownChirp)
当前车载FMCW雷达的调制波形基本都是Sawtooth Chirp。如下图所示,也称为Fast FMCW。其每个Chirp持续时间基本上是几十us量级。同时每个Frame中会有idle 时间,这个是留个信号处理以及雷达的功能安全自检的。
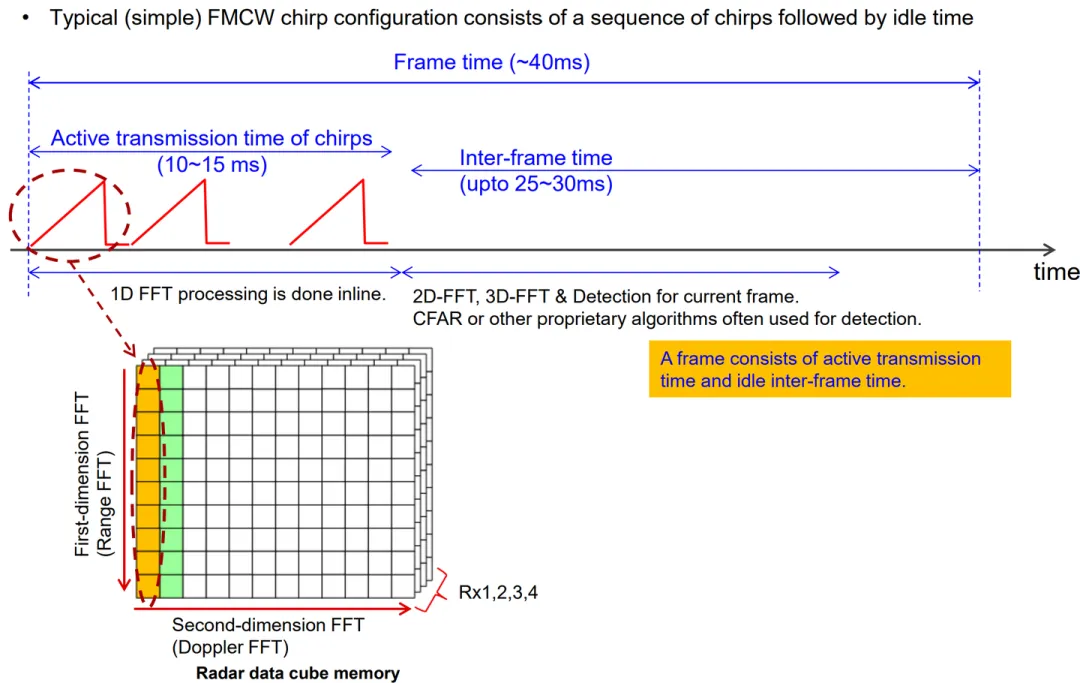 图11 Fast FMCW
图11 Fast FMCW3、Triangular Chirp(Slow FMCW)
Triangular Chirp一般是过去FMCW雷达系统所用的,其Chirp一般调制时间是ms级的;下文对此做了一些比较和论述。
Ref:[IEEE 2001 CIE International Conference on Radar - Beijing, China (15-18 Oct. 2001)] 2001 CIE International Conference on Radar Proceedings (Cat No.01TH8559) - Waveform design principles for automotive radar systems | 10.1109/icr.2001.984612_Science Hub
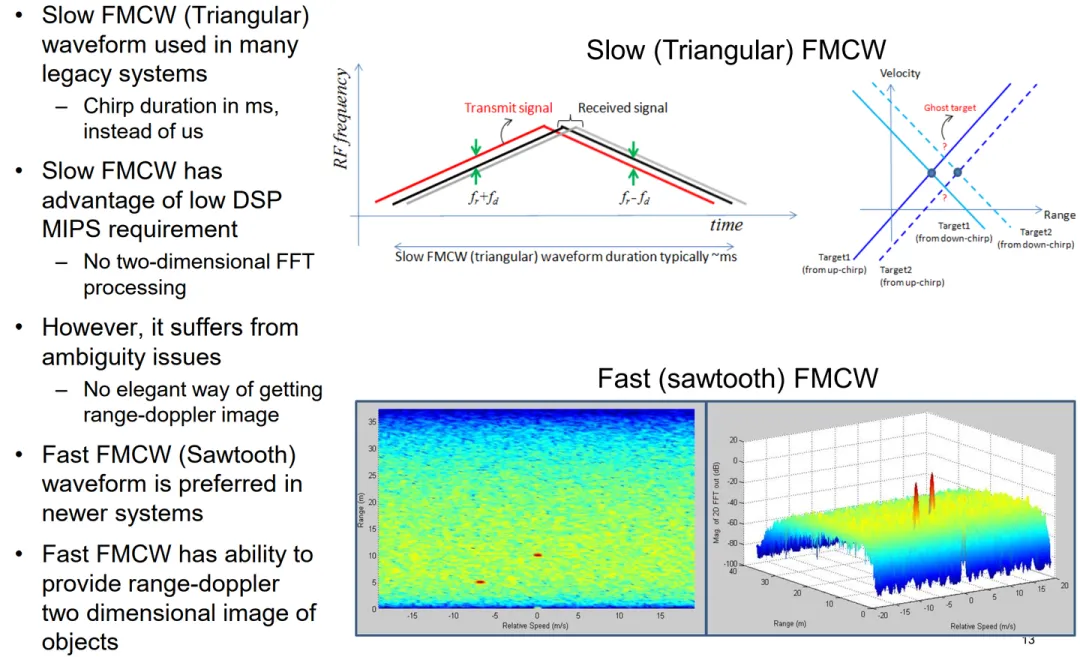 图12 Slow FMCW
图12 Slow FMCW4、Chirp 配置
Ref:https://e2e.ti.com/support/sensors-group/sensors/f/sensors-forum/593960/please-provide-the-timing-equations-for-the-fmcw-chirp-profile-specifically-tx-start-time-and-idle-time-for-mmwave-sensor-iwr1443
Ref:https://www.ti.com/lit/an/swra553a/swra553a.pdf?ts=1757893930257
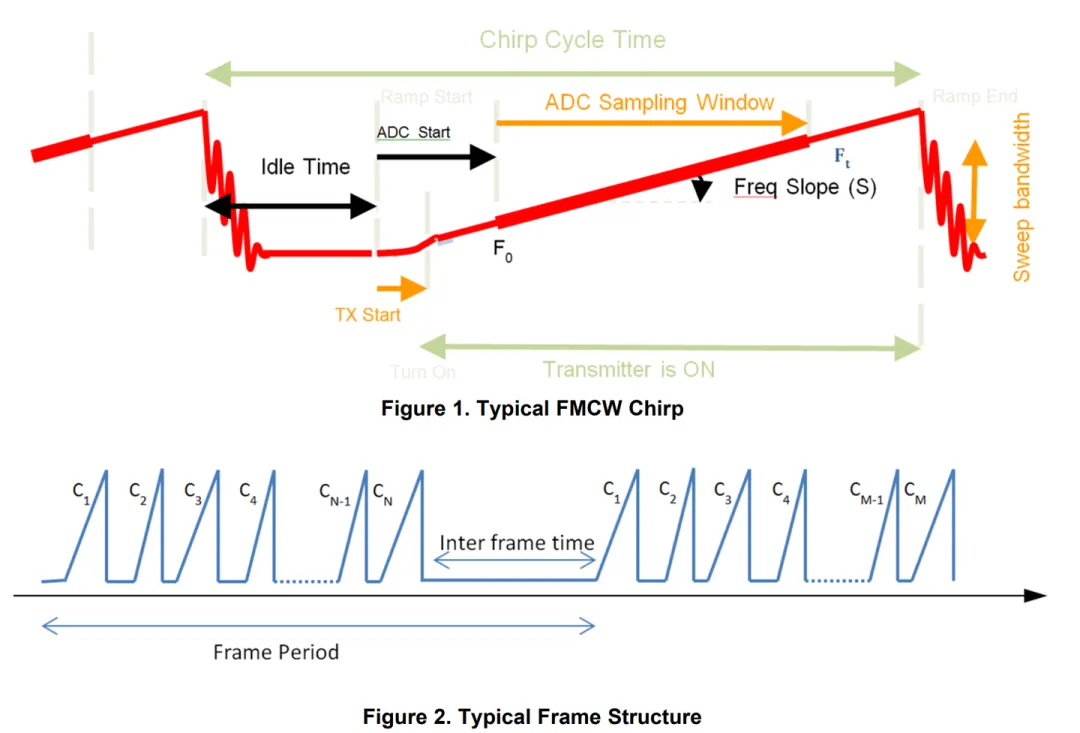 图13 实际雷达MMIC中的Chirp配置
图13 实际雷达MMIC中的Chirp配置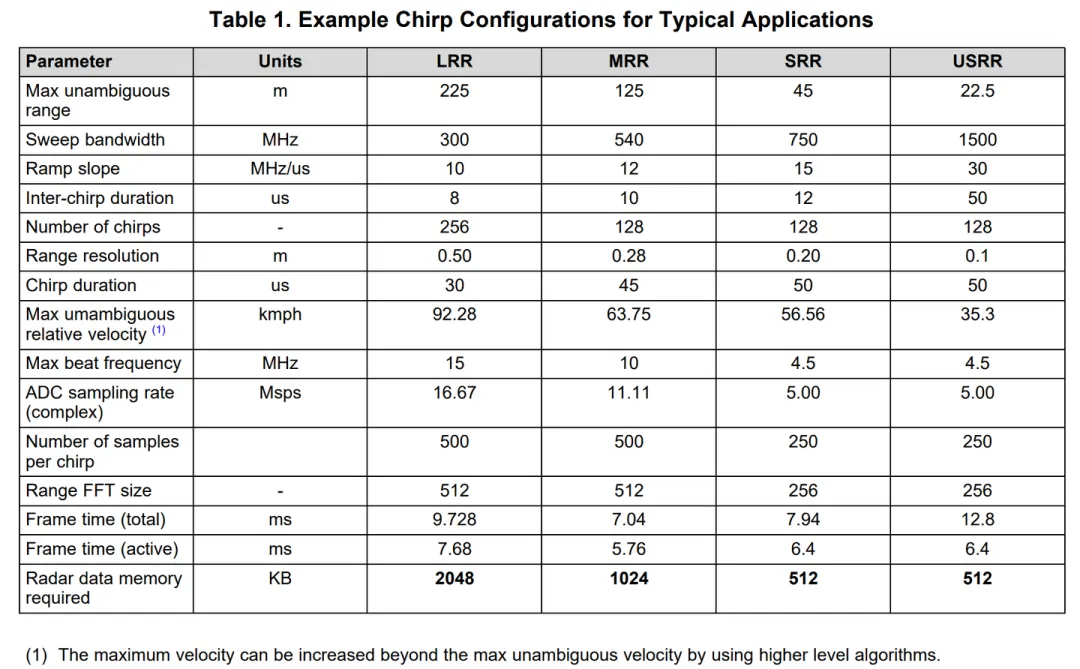 图14 实际雷达MMIC中的Chirp配置
图14 实际雷达MMIC中的Chirp配置5、Advanced Ramp Sequence
很多应用中需要兼顾远距(低分辨率)和近距(高分辨率)应用,所以就出现了Advanced Ramp Sequence,如下所示
https://www.researchgate.net/figure/Ramp-sequence-based-FMCW-radar-waveform-a-typical-waveform-with-modulation-slope-b_fig2_306273215
https://www.cadence.com/en_US/home/resources/white-papers/fp-fmcw-radar-signal-tensilica-dsps-wp.html
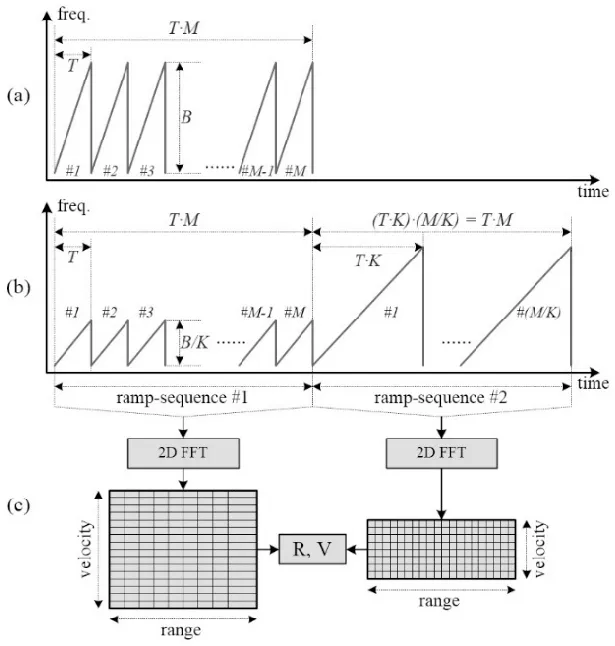 图15 Advanced Ramp Sequence
图15 Advanced Ramp Sequence6、FMCW体制雷达信号处理流
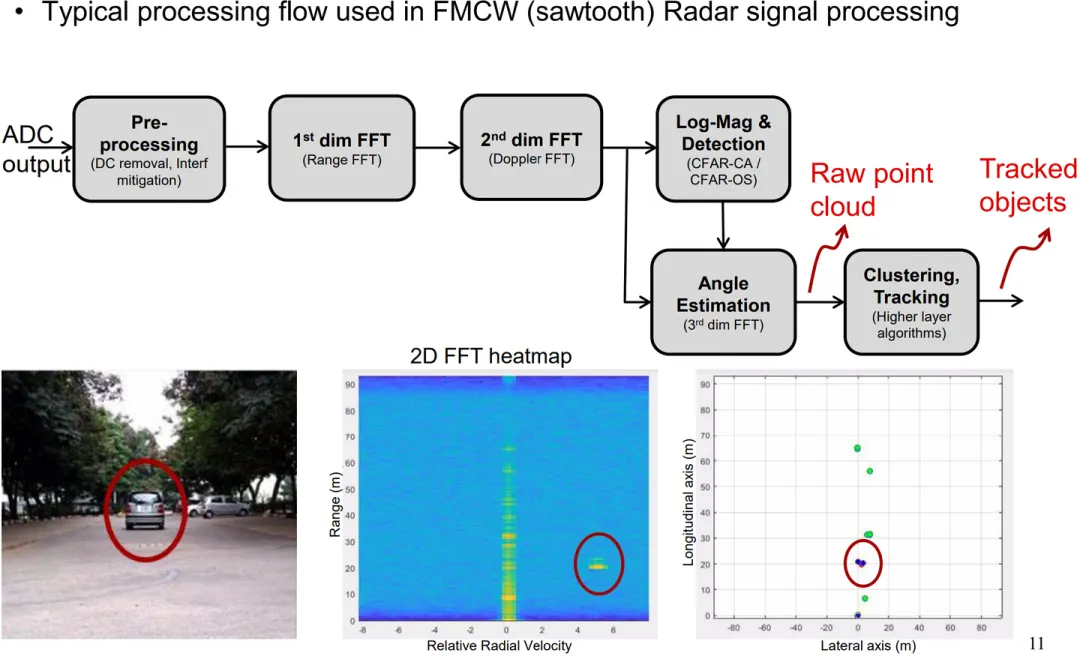 图16 FMCW雷达信号处理流
图16 FMCW雷达信号处理流 10个月宝宝每天需要喝多少奶粉?
10个月宝宝每天需要喝多少奶粉?
