本文介绍超声波雷达在车载中的应用
1、泊车库位检测
Ref:https://auto.jgvogel.cn/c/2020-05-19/1034185.shtml
自动泊车功能需要经历两个阶段:1. 识别库位;2. 倒车入库
识别库位功能就是依赖安装在车辆侧方的 APA,如下场景。
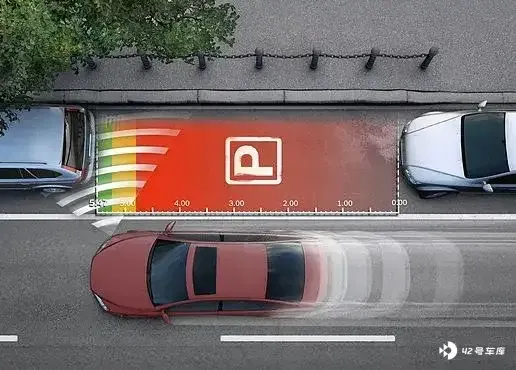
图1-1 泊车库位检测 图1-2 泊车库位检测
图1-2 泊车库位检测汽车缓缓驶过库位时,汽车右前方的 APA 传感器返回的探测距离与时间的关系大致如下图:
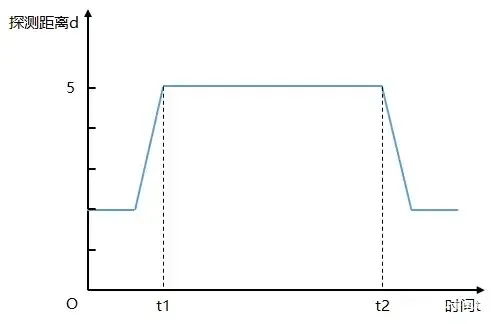 图2 泊车库位检测原理
图2 泊车库位检测原理将 t1 时刻到 t2 时刻的车速做积分即可得到库位的近似长度,如果近似认为汽车为匀速行驶,直接用车速乘以 (t2-t1) 即可。当检测的长度超过车辆泊入所需的最短长度时则认为当前空间有车位。
同样后侧向的 APA 也会生成类似信号曲线,用以做库位的二次验证。
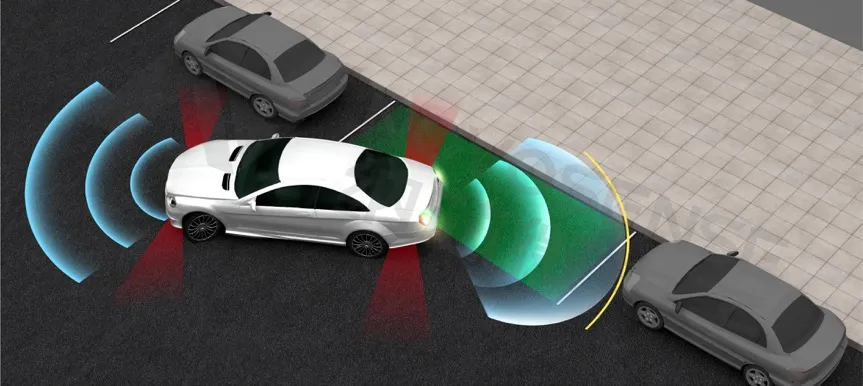
图3 泊车库位检测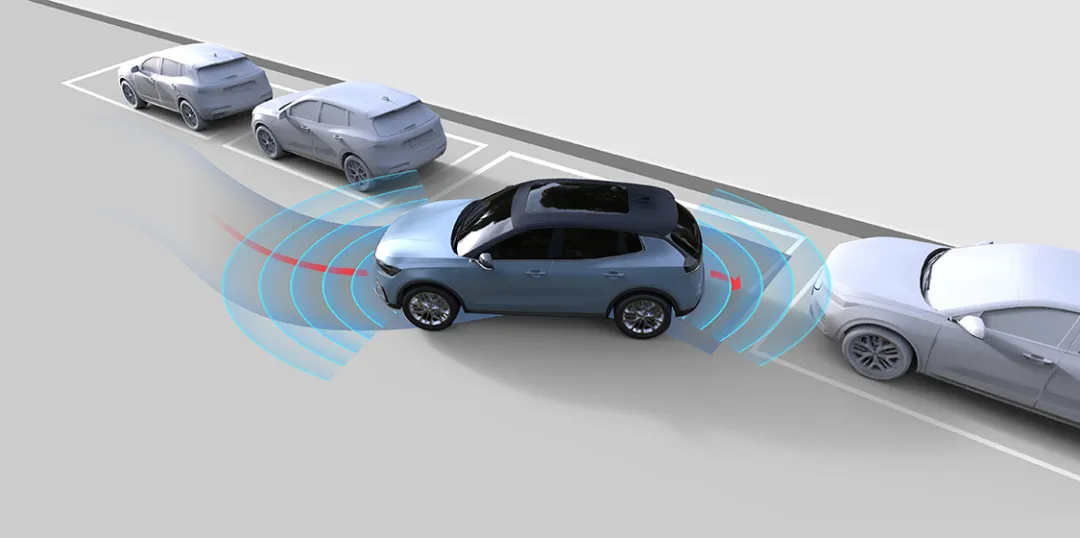 图4 泊车库位检测
图4 泊车库位检测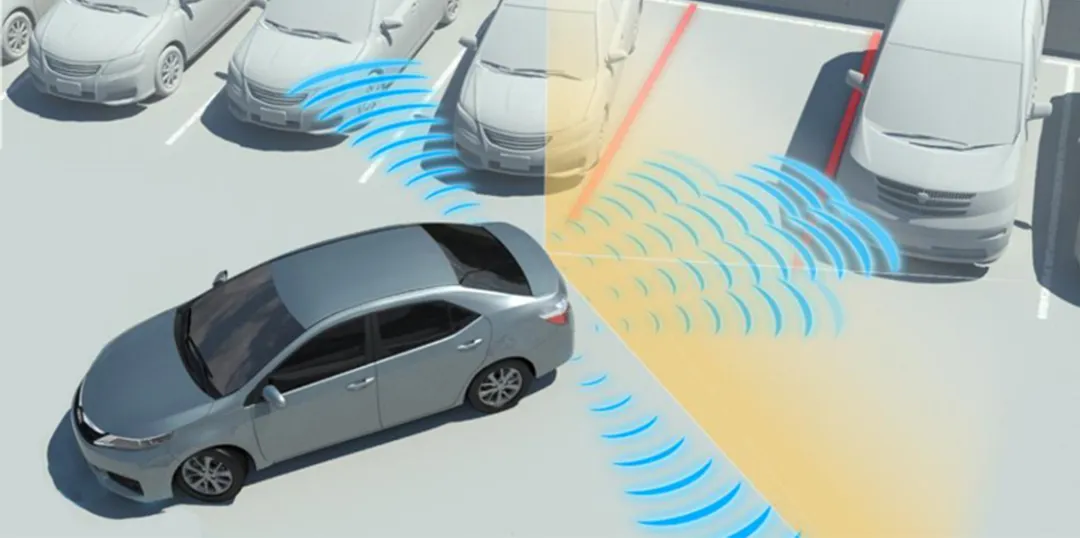 图5 泊车库位检测
图5 泊车库位检测Ref:https://www.otobrite.com/uploads/files/shares/otoparking-apa-avp.pdf
2、高速横向辅助
特斯拉 Model S 在 AutoPilot 1.0 时代就实现了高速公路的巡航功能,为了增加高速巡航功能的安全性和舒适性,特斯拉将用于泊车的 APA 超声波雷达,也用在了高速巡航上。
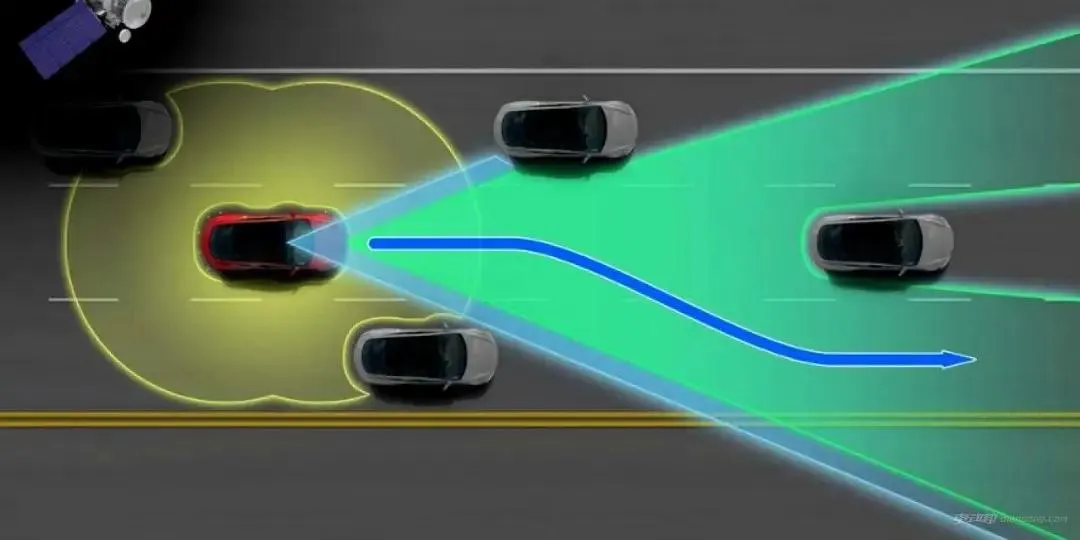 图6 tesla 超声波雷达 高速横向辅助
图6 tesla 超声波雷达 高速横向辅助当左侧驶过的汽车离自车较近时,Model S 在确保右侧有足够空间的情况下,自主地向右微调,降低与左侧车辆的碰撞风险。
需要注意的是,Tesla在之前很长一段时间内,使用的泊车就是这套传统的只有超声波传感器的泊车传感器套件,缺少国内很多智能驾驶厂商的鱼眼传感器套件。这种方式本质上是对空间车位的辨识与判空,对画线车位的感知能力存在先天不足,这也是为什么很多人认为Tesla“泊车能力不强”的原因。
3、PDC(Parking Distence Control)障碍物近距离告警
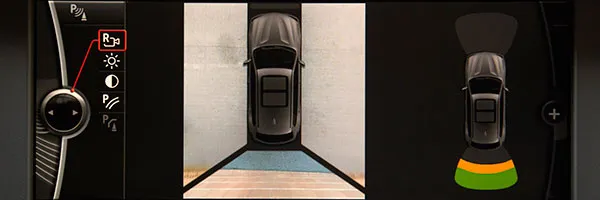 图7 应用UPA的障碍物距离检测功能
图7 应用UPA的障碍物距离检测功能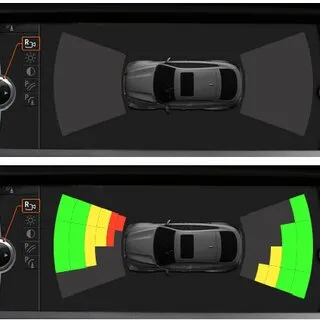 图8 应用UPA的障碍物距离检测功能
图8 应用UPA的障碍物距离检测功能应用UPA的障碍物距离检测功能,分区显示车辆周边障碍物情况。进一步的,通过UPA的近距离检测触发AVM(Around View Monitor)功能,进一步结合视觉信息给与驾驶员更多辅助支持。
Ref:https://www.researchgate.net/figure/ehicle-interaction-use-case-A-ubiquitous-park-distance-control-PDC-application-able-to_fig4_257666012
4、路面涉水检测
Ref:https://www.coligen.com/ultrasonic-sensor-system/
涉水传感器系统安全覆盖洪水淹没的道路
● 超声波传感器:检测车辆涉水状态 ● 声纳传感器:检测水下状况并发出警告和警报 ● 非ECU传感器,安装方便 ● 原理:利用超声波传感器技术检测车辆涉水状态 ● 超声波传感器:结合左右后视镜位置及高度、车辆轮胎规格及倾斜角度等信息,进行障碍物离地高度检测(水位高度),当水位达到涉水预警水平时,触发声音及视觉报警 ● 声纳传感器:检测水下状况并发出警告和警报
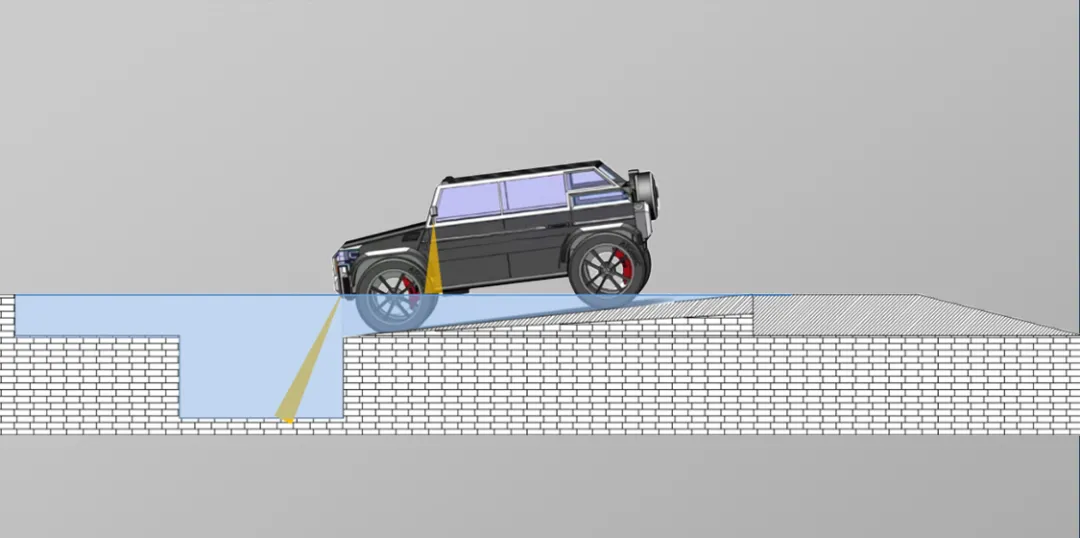 图9 路面涉水检测
图9 路面涉水检测 图10 配备两个超声波传感器:空气介质传播,声音传播速度为340m/s
图10 配备两个超声波传感器:空气介质传播,声音传播速度为340m/s 图11 配备两个声纳传感器:利用液体介质传播,声速为1500m/s
图11 配备两个声纳传感器:利用液体介质传播,声速为1500m/s5、未来发展趋势
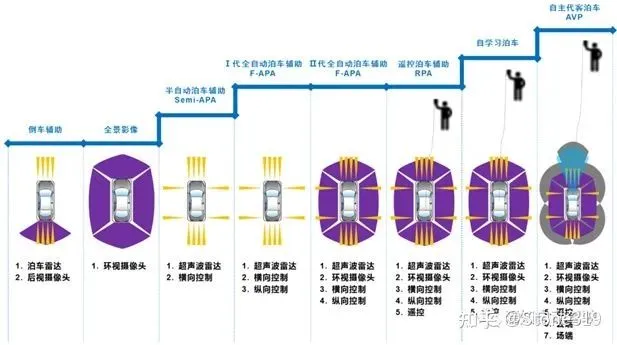
图12 自动泊车方案路线Ref:https://www.eet-china.com/mp/a73222.html
AVP自动代客泊车
VP除了要实现泊入车库的功能外,还需要解决从驾驶员下车点低速(小于20km/h)行驶至库位旁的问题。为了能尽可能地安全行驶到库位旁,必须提升汽车远距离感知的能力,前视摄像头成为了最优的传感器方案。地上/地下停车场不像开放道路,场景相对单一,高速运动的汽车较少,对于保持低速运动的自车来说,更容易避免突发状况的发生。
常用的激光雷达和毫米波雷达没被选用的原因是,激光雷达的成本较高,在成本降下来之前,不在大部分车企的量产考虑范围内;毫米波雷达由于感知原理的限制,在低速下的表现并不好,而且在地库中使用时信噪比不高,也不做考虑。
综合以上几点,最基本的AVP自动代客泊车的技术方案如下:
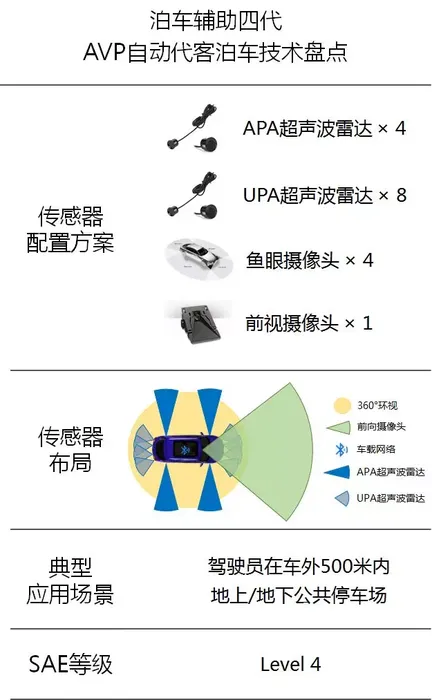
图13 AVP功能除了以上提到的传感器外,实现VP还需要引入停车场的高精度地图,再配合SLAM或视觉匹配定位的方法,才能够让汽车知道它现在在哪,应该去哪里寻找停车位。
除了自行寻找停车位外,具备VP功能的汽车还可以配合智能停车场更好地完成自动代客泊车的功能。智能停车场需要在停车场内安装一些必要的基础设施,比如摄像头、地锁等。这些传感器不仅能够获取停车位是否被占用,还能够知道停车场的道路上是否有车等信息。将这些信息建模后发送给汽车,汽车就能够规划出一条更为合理的路径,行驶到空车位处了。
Ref:https://auto.jgvogel.cn/c/2020-05-19/1034185.shtml
Ref:https://www.eet-china.com/mp/a276405.html
Ref:关于自动驾驶泊车的市场功能,硬件和技术 - OFweek新能源汽车网
Ref:https://news.eeworld.com.cn/qrs/ic560813.html
Ref:超声波雷达在APA自动泊车功能中的应用与仿真 - 北汇信息 - 博客园
Ref:https://news.eeworld.com.cn/qrs/ic628612.html
利用汽车物联网
虽然大多数驾驶员依靠这些传感器进行平行停车,但 INRIX 开发了一项新技术,该技术使用 USS 扫描、收集并将实时停车位占用信息传输到云端,最终帮助引导驾驶员找到可用的停车位。
Ref:https://inrix.com/blog/ultrasonic-sensor-parking-availability-technology/
其工作原理如下:当汽车在街道上行驶时,超声波传感器会发射声波,收集停放车辆和空置停车位的数据。这些数据随后会被匿名发送到 INRIX 停车云平台进行分析,并与我们现有的停车位可用性预测引擎相结合,以确定每个街区的停车位占用率。
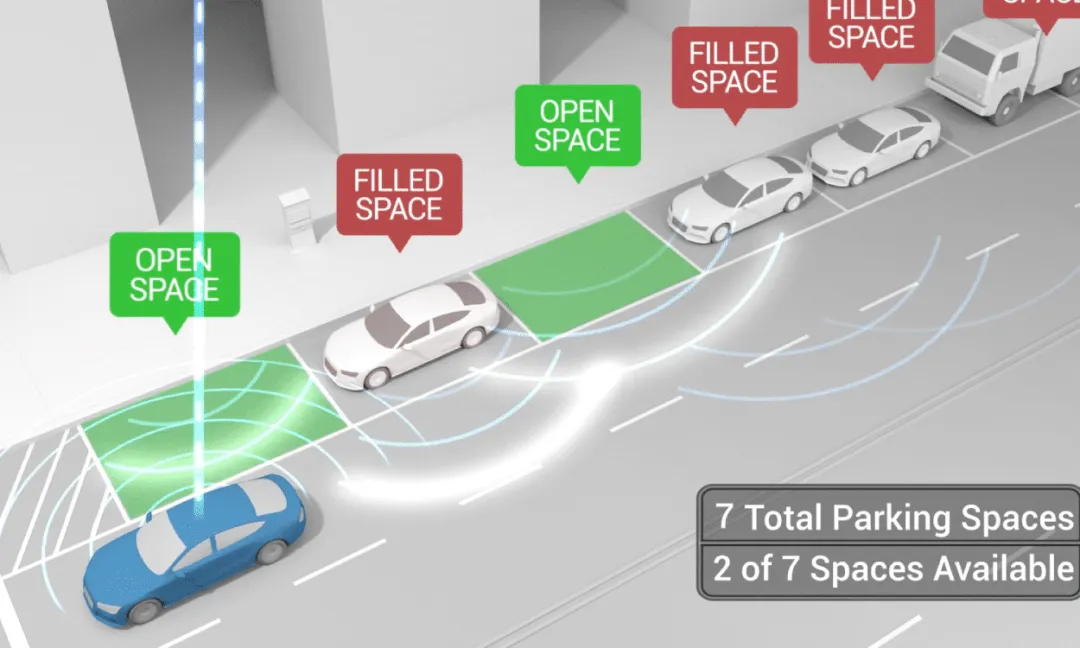 图14 利用汽车物联网的APA技术
图14 利用汽车物联网的APA技术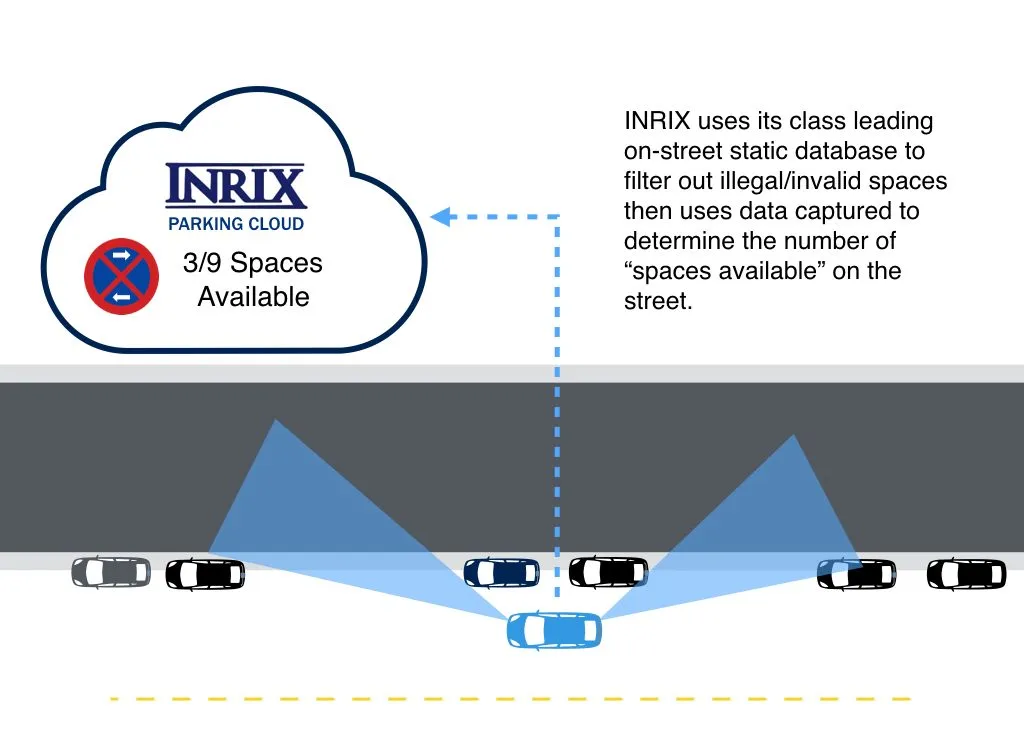 图15 利用汽车物联网的APA技术
图15 利用汽车物联网的APA技术 10个月宝宝每天需要喝多少奶粉?
10个月宝宝每天需要喝多少奶粉?
