单日狂飙347米!毅力号打破火星自动驾驶纪录,背后的 “导航大脑” 藏着这些黑科技
- 2026-03-19 11:28:53





关注鼓捣AI
了解行业动态

鼓捣AI 持续关注机器人
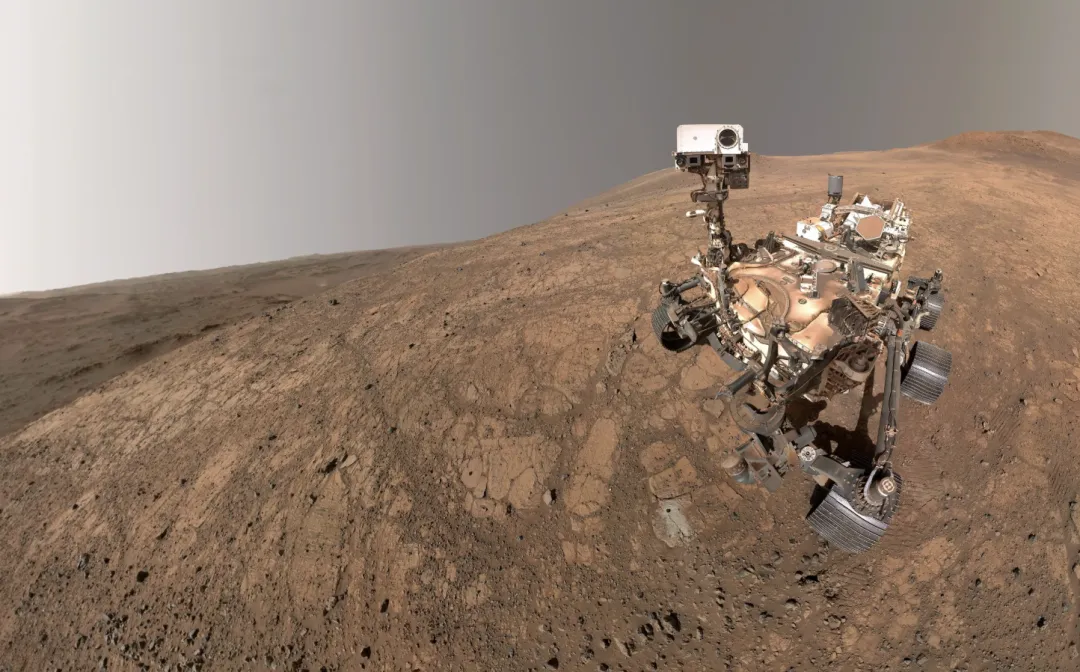
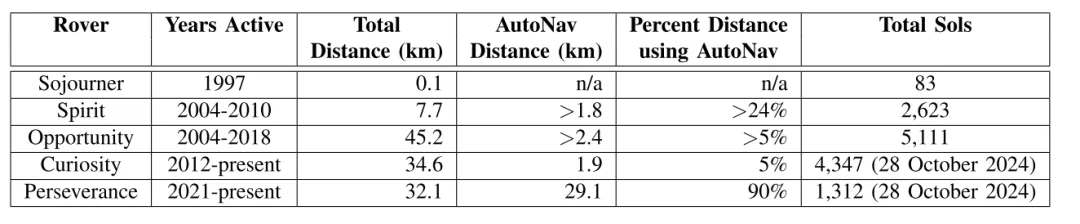
在遥远的红色星球上,NASA 的 “毅力号” 火星车正书写着星际探索的新传奇。2023 年 4 月 3 日(火星第 753 个太阳日),它创下 347.69 米的单日行驶纪录,其中自主驾驶段长达 331.74 米,远超前辈 “机遇号” 保持的 109 米纪录。截至 2024 年 10 月 28 日,毅力号已在火星表面累计行驶 32.1 公里,其中 90% 的路程依赖自主导航系统(ENav)完成 —— 这一数据较 “好奇号” 的 5% 实现了质的飞跃。这台火星车为何能在岩石密布、地形复杂的火星表面 “畅行无阻”?其核心秘密藏在一篇发表于IEEE Transactions on Field Robotics的《Enhanced Autonomous Navigation on thePerseverance Mars Rover》论文中。
绝境催生的 “导航大脑”:ENav 算法的突破之道
火星探索向来面临双重困境:一是通信延迟导致无法实时遥控,二是极端环境对硬件算力的严苛限制。毅力号搭载的仍是 133MHz 的单核心 RAD750 处理器,与前辈“好奇号”配置相同,但它却实现了自动驾驶效率的量级提升,关键就在于全新的增强型自主导航算法(ENav)。
1、两阶段路径选择:在效率与安全间找到平衡
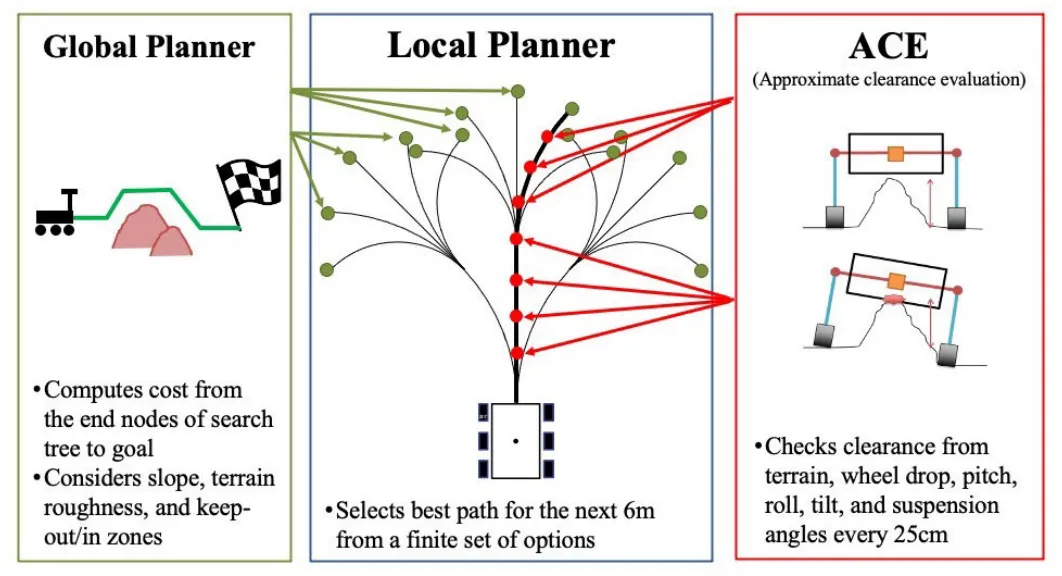
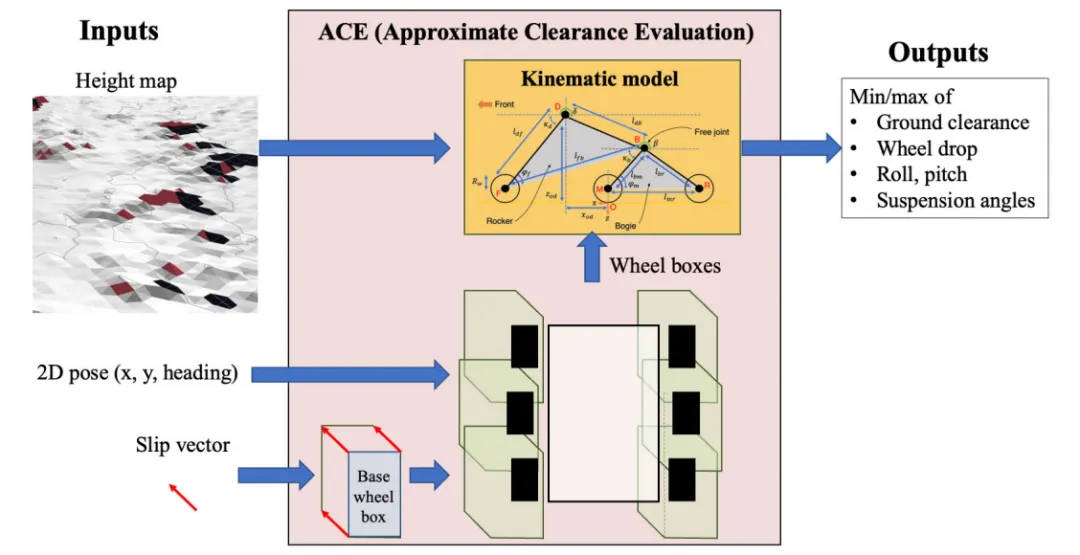
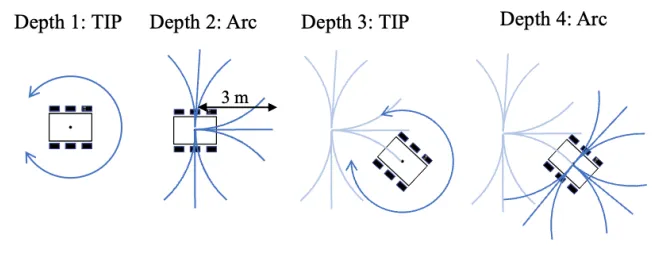
ENav 最核心的创新是 “先排序、后验证” 的两阶段路径规划策略。面对复杂地形,算法先快速计算所有候选路径的 “路径成本”(包括行驶时间、转向耗时、地形惩罚等),筛选出最优候选集;再对排名靠前的路径运行耗时的碰撞检测(ACE 算法),验证其安全性。这种设计让毅力号在平坦地形中能快速决策连续行驶,在复杂地形中也能精准避障,避免了传统算法 “要么慢、要么险” 的弊端。
2、ACE 碰撞检测:给车轮装上 “安全结界”
火星表面的岩石、沙丘和陡坡是导航致命威胁,ENav 搭载的 ACE(近似间隙评估)算法堪称 “防撞神器”。它不再将火星车视为单一圆盘,而是精准追踪六个车轮的实时位置,通过扩展车轮的 “不确定性边界”,提前预判打滑、倾斜等风险。哪怕在 16°-23° 的陡坡(如蛇形急流区和萨默兰小径),ACE 也能每 25 厘米检查一次地形,确保车身 clearance、车轮落差、悬挂角度等关键指标始终处于安全阈值内。
3、抗滑黑科技:在沙地上 “站稳脚跟”
火星沙地的打滑问题曾让多台火星车寸步难行,ENav 通过 “斜率 - 打滑” 映射模型破解这一难题。算法根据地形坡度预判打滑方向和最大幅度,动态调整车轮的安全边界,哪怕在松散的沙质斜坡上,也能通过路径调整减少车轮空转。在萨默兰小径的高难度攀爬中,正是这套系统让毅力号在无裸露基岩的地形上成功登顶。
火星实战:32 公里征程中的纪录与挑战
自 2021 年 2 月登陆杰泽罗陨石坑以来,毅力号的 ENav 系统经历了火星极端环境的全面考验,交出了一份亮眼答卷。

1、创纪录时刻:从快速穿越到陡坡攀爬
最长单日自主驾驶:sol 753 的 347.69 米纪录,相当于机遇号巅峰时期的 3 倍,且全程自主避障;
连续多日狂飙:sol 407-409 期间,连续三天自主行驶 699.85 米,无需地面干预;
高难度地形突破:成功攀爬 23° 陡坡,远超设计初期的 16° 限制,刷新火星车自主导航坡度纪录。
这些成就背后,是 ENav 对杰泽罗陨石坑复杂地形的精准适应 —— 这里的岩石密度远高于好奇号所在的盖尔陨石坑,却被毅力号以 92 米 / 小时的平均速度轻松征服,较好奇号的 17.3 米 / 小时提升 5 倍。
2、智能应对危机:那些 “化险为夷” 的名场面
ENav 的智能不仅体现在快速行驶,更在于危机处理的灵活性:
sol 129:为避开 “机智号” 直升机的禁入区,自主规划绕行路径,在岩石群中找到安全通道;
sol 909:通过高度图识别沙丘盲区,主动选择迂回路线,避免攀爬未知危险地形;
sol 1100:在复杂地形区因保守参数无法前进时,自动切换至测绘模式收集地形数据,为地面团队调整参数争取时间。
3、数据见证实力:自主导航的革命性提升
对比 NASA 历代火星车,毅力号的自主导航使用率实现了跨越式增长:

未来可期:火星车将解锁更多 “超能力”
现实意义
为什么这次进展如此重要?
✅ 提高科学产能 —— 自动导航减少对地球指令的依赖,每天可以覆盖更多地表区域,获得更多地质数据。
✅ 应对通信延迟 —— 火星与地球之间约有20余分钟的信号延迟,自主导航是解决这一问题的根本途径。
✅ 为深空探索铺路 —— 未来火星样本返回任务、甚至载人火星任务,智能地面自主驾驶都是必备核心技术。
未来展望
目前毅力号的 ENav 系统仍在持续进化。根据论文规划,2025 年 8 月的软件升级将加入全球定位功能,通过 Ingenuity 直升机的骁龙处理器辅助,减少位置不确定性带来的导航限制(如 sol 385 因定位偏差导致的路径中断问题将彻底解决)。
更长远来看,机器学习的融入将让火星车更 “聪明”:通过语义分割识别地形类型,提前规避 slippery sand 等非几何危险;借助强化学习优化路径排序,进一步减少 ACE 碰撞检测的计算量。未来的火星车或许能像地球的自动驾驶汽车一样,自主规划长期科考路线,甚至协同多台设备完成复杂任务。
从 1997 年 “旅居者号” 的 0.1 公里蹒跚,到如今毅力号的 32 公里驰骋,火星车自主导航的进化史,正是人类探索星际能力的缩影。ENav 算法用有限的算力实现了极致的智能,不仅让毅力号成为 “火星最强自驾车”,更为未来月球、小行星探测提供了可复用的导航方案。
感谢您的阅读,若有不实之处,可以关注微信公众号 “鼓捣 AI” 留言反馈,欢迎大家批评指正。
往期精选推荐
机器人技术入门圣经:详细拆解机器人定义、历史起源、核心组件、控制架构与应用场景
一脑统群:看 Humanoid 如何用 KinetIQ 让机器人协同工作?
2B干翻GPT-4o!类R1-Zero训练让MLLM视觉空间推理能力飙升
“小模型干大事”:开源DaDu-E如何用 8B LLM 打出 GPT‑4o 级别机器人规划能力
用大模型让机器人“听懂人话”:ICRA 2025开源工作Hey Robot实现零样本个性化导航
请在微信客户端打开
随机文章
-
 10个月宝宝每天需要喝多少奶粉?
10个月宝宝每天需要喝多少奶粉?
- 仅售10.98W!丰田SUV闭眼入手,油耗4.56L喝92油,好开还省心
- 高端市场的博弈!1月高端SUV销量榜,X5第5,问界M9第8,航海家21
- 总装SUV区域全力冲刺一季度生产开门红
- 国产SUV”全能王”!近5米车长,5/6/7座任选,2.0T油耗仅5.9L
- 3月SUV前瞻丨风云T9L设计在线,大众9系、零跑A10有搞头?
- 十万出头买硬派SUV!这台能城能野的哈弗大狗,是不是你的菜?
- 一汽、零跑首款SUV再曝光,2026年亮相!
- 谍照曝光!享界硬派SUV来了,高端越野要变天
- 10万级混动SUV新王?i60用210km续航说话
- 均胜电子 L3/L4 域控量产在即:自动驾驶从 “辅助” 到 “自主” 的产业拐点
