本文介绍车载IMU的技术需求以及典型供应商的适配
车辆坐标系又称车身坐标系,原点一般为车辆的质心,或者后轴的中点。X轴指向车头前方,Y轴指向驾驶员的左侧,Z轴垂直于车身指向上方。
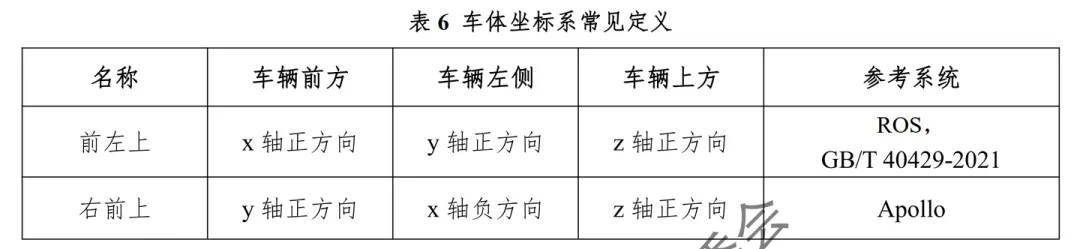
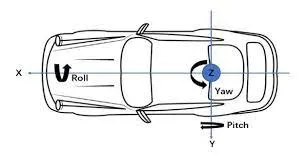 图1 前左上坐标系
图1 前左上坐标系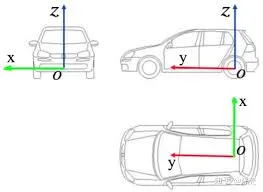 图2 右前上坐标系
图2 右前上坐标系Ref:https://catarc.org.cn/upload/202312/25/202312251456042419.pdf
1、自动驾驶用IMU
项目 | 技术需求 | 村田SCHA634 | 导远电子 GST80 |
|---|
安装位置 | Y≤40mm,X和Z不做要求,尽量小 | | |
安装角度 | XYZ三轴均为0° | | |
轴数 | 6 | | |
传输速度(更新) | ≥100Hz(10ms) | | |
带宽 | 50Hz左右(46Hz) | | 10Hz~320Hz |
量程 | 加速度计:≥±4g 陀螺仪:≥±250°/s | 加速度计:±6 g(可选 ±2 g、±4 g、±8 g、±16 g) 陀螺仪:±125 °/s 或 ±300 °/s(可选 ±250 °/s、±500 °/s、±1000 °/s、±2000 °/s) | 加速度计:±16 g,±40 g 陀螺仪:±300 °/s 或 ±600 °/s(可选 ±2000 °/s) |
精度 | 陀螺仪: Bias instability 8°/hr Offset over tempperature 0.5°/s(1σ) Angle random walk ≤0.41 °/s/√h 加速度计: Bias instability 0.05mg Offset over tempperature 30mg Velocity random walk 0.075m/s/√h | 陀螺仪 RMS 噪声:< 0.007 °/s(高精度姿态测量) 阿伦方差(零偏漂移):0.9 °/h(零偏稳定性极佳) 交叉轴误差:< 0.3°(宽温度范围下)(动态交叉轴校准 ) | |
分辨率 | 陀螺仪:80LSB/deg/s 加速度计:4905 LSB/g | 16 bit 分辨率 | 16 bit 分辨率 |
功能安全要求 | ASIL-B | | |
其他特性 | | - 动态交叉轴校准 - 工厂校准零偏、比例因子、轴向对齐 - 防震冲击可靠性(≥10 000 g) - 支持自检功能 适用于 ADAS、自动驾驶、惯性导航、车道保持等多种车规应用 | IO safe state,SYNC(帧同步) 内置 SCON(Safety Controller)实时监控电源、时钟、软硬件功能及关键信号,实现故障预报与诊断 |
2、TBox用IMU
项目 | 技术需求 | UM220-INS NF | 备注 |
|---|
安装位置 | 随TBox | https://www.unicorecomm.com/assets/Tech%20Lab/UFirebird/maintained%20products/doc/ch/UM220-INS%20NF/UM220-INS%20NF_User%20Manual_CH_R1.1.pdf | UM220‑INS NF 采用了内部集成的 6 轴 MEMS 传感器,为 GNSS 定位提供惯性信息,提升了在信号遮挡环境下的连续定位能力。 5G‑TBox 需要 GNSS RTK 与 IMU 融合可实现亚米级定位精度,说明 IMU 的性能必须满足高精度姿态推算的需求。 |
安装角度 | 随TBox | | |
轴数 | 6 | | |
传输速度(更新) | • 最低 200 Hz(部分产品 800 Hz) • 支持高速数据流(SPI/I²C) | | |
带宽 | 陀螺仪: 加速度计: | | |
量程 | • 陀螺仪量程:±400°/s • 加速度计量程:±8 g(亦有 ±2/4/8/16 g 可选) | | |
精度 | • 陀螺仪零偏稳定性 ≤ 6°/h(高精度型号 ≤ 0.05°/h) • 加速度计零偏稳定性 ≤ 0.02 mg(≈ 20 µg) | • 陀螺仪速率噪声 0.004 °/s/√Hz(或 0.01 °/s/√Hz) • 加速度计噪声 100 µg/√Hz | • 陀螺仪随机漂移 0.01 °/h·√Hz(低端约 0.18 °/h·√Hz) • 加速度计随机漂移 0.01 m·s⁻¹·√Hz(低端约 0.12 m·s⁻¹·√Hz) |
分辨率 | S2g:1024 LSB/g S4g:512 LSB/g S8g:256 LSB/g S16g:128 LSB/g | | |
功能安全要求 | QM | | |
3、底盘悬架用IMU
项目 | 技术需求 | BMI088 | 备注 |
|---|
安装位置 | X<300mm,Y<20mm,Z<100mm | | |
安装角度 | | | |
轴数 | 6 | | |
传输速度(更新) | ≤2ms | 输出速率:12.5 Hz ~ 2 kHz | |
带宽 | 250Hz | 5 Hz ~ 523 Hz(可配置) | |
量程 | 加速度计:≥±4g 陀螺仪:≥±250°/s | 加速度计:±3 g、±6 g、±12 g、±16 g、±24 g(可选) 陀螺仪:±125 °/s、±250 °/s、±500 °/s、±1000 °/s、±2000 °/s(可选) | |
精度 | | 加速度计: 零偏:±20 mg(典型) 温度系数:±0.2 mg/K 噪声密度:175 µg/√Hz(部分文档给出 230 µg/√Hz) 陀螺仪: 零偏:±1 °/s(典型) 温度系数:±0.015 °/s/K 噪声密度:0.014 °/s/√Hz 偏置稳定性:< 2 °/h(汽车级陀螺仪技术) | |
分辨率 | 陀螺仪:120LSB/deg/s 加速度计:8000 LSB/g | 16 bit 加速度计:10920 LSB/g(±3 g)至 1365 LSB/g(±24 g) 陀螺仪:262.144 LSB/°/s(±125 °/s)至 16.384 LSB/°/s(±2000 °/s) | |
功能安全要求 | QM | | |
其他 | | 同步采样:加速度计与陀螺仪可实现同步采样,确保时间戳一致 高抗振动:专为 300 Hz 以上的振动抑制设计,适合无人机、机器人等高振动环境。 低噪声 & 高分辨率:加速度计噪声密度 < 200 µg/√Hz,陀螺仪噪声密度 < 0.015 °/s/√Hz,保证精细运动捕捉。 | |
供应商 | 型号 | 关键特性(适用于底盘‑悬架) | 备注 |
|---|
Bosch Sensortec | SMI240 | 6 轴(3 轴陀螺仪 ±300 °/s、3 轴加速度计 ±16 g),噪声低(陀螺仪 ≤0.1 °/s,加速度计 ≤4 mg),符合汽车级 AEC‑Q100 1 级,适合高频路面激励的姿态估计 | 常用于高级驾驶辅助(ADAS)与底盘动态控制 |
| BMI088 | 6 轴(陀螺仪 ±2000 °/s、加速度计 ±24 g),超低噪声、抗振动能力强,基于 Bosch 汽车技术,已量产 | 适合需要宽量程与高鲁棒性的空气悬架、主动阻尼系统 |
| BMI160 / BMI260 | 低功耗 6 轴,量程可选(陀螺仪 ±125 °/s~±2000 °/s),适用于成本敏感的底盘子系统 | 若对功耗有严格限制,可选此系列 |
STMicroelectronics | ASM330LHBG1 | 6 轴(陀螺仪 ±2000 °/s、加速度计 ±16 g),符合 AEC‑Q100 1 级,支持 I²C、SPI,具备车规安全认证 | 适用于车身控制单元(BCU)与悬架电子控制单元(ECU) |
TDK InvenSense | ICM‑42688‑V | 6 轴 MEMS,±2000 °/s、±16 g,温度范围 ‑40 ~ 85 °C,车规封装,支持 I²C、SPI,已在多款量产车型中使用 | 高精度姿态融合的底盘域控制器常选 |
| DK‑42688‑P(6 轴评估套件) | 与 ICM‑42688‑V 相同核心,适用于原型验证与功能验证阶段 | 研发阶段的快速验证平台 |
Honeywell | TARS‑IMU(系列) | 16 通道 CAN 接口,重量约 170 g,支持 +Z 方向固定安装,适配车规级高可靠性需求 | 适用于对抗干扰能力要求极高的线控底盘系统 |
KVH Industries | KVH‑1725 / KVH‑1750 | 高精度惯性导航模块,偏置漂移 ≤ 0.02 °/h,支持多种接口(CAN、RS‑422),已在多款高端车型底盘控制中使用 | 适合需要长期漂移极低的主动悬架 |
NovAtel | IMU‑H1930‑CA50、IMU‑IGM‑A1、IMU‑ISA‑100C | 车规级 6 轴 IMU,提供完整的 GNSS‑IMU 融合套件,偏置漂移 ≤ 6 °/h,支持多种软件模型(S1‑S3) | 常用于需要 GNSS‑辅助定位的底盘域控制器 |
Aceinna | IMU381ZA | 6 轴,量程 ±200 °/s(高范围 ±400 °/s),偏置漂移 6 °/h,专为汽车动力学与底盘控制设计 | 适合中高端电动/混动平台的悬架控制 |
Analog Devices (ADI) | ADIS‑16497 | 3 轴陀螺仪(±125 ~ ±450 °/s),偏置漂移 0.8 °/h,车规认证,适用于高精度姿态感知 | 可与其他传感器(雷达、摄像头)融合 |
Continental | Continental‑IMU‑Series(具体型号未公开) | 提供车规级 6 轴 IMU,支持 ISO 26262,已在多家 OEM 的线控底盘中使用 | 适用于整车平台的统一底盘感知方案 |
选型建议
- 高动态范围需求(如空气悬架、主动阻尼):优先考虑 Bosch BMI088、KVH‑1725/1750、Bosch SMI240。
- 低功耗、成本敏感:可选 Bosch BMI160/BMI260 或 ST ASM330LHBG1(功耗略高但车规安全)。
- 需要 GNSS‑IMU 融合:NovAtel IMU‑H1930‑CA50、IMU‑IGM‑A1 系列提供完整的融合软件栈。
- 对长期漂移极低(如电动汽车的主动悬架):Honeywell TARS‑IMU、KVH‑系列、Aceinna IMU381ZA。
- 快速原型验证:使用 TDK ICM‑42688‑V(量产)或 DK‑42688‑P(评估套件)进行软硬件联调。
4、Airbag用IMU
项目 | 技术需求 | NXP FXLS93 | 备注 |
|---|
安装位置 | 中央通道位置 与质心偏差:X/Y/Z≤300mm(半载) | https://www.nxp.com/products/FXLS93 | • 安装位置:靠近车辆质心(COG)并沿纵向轴线 • 使用防振支架,阻尼系数需匹配车辆振动频谱 • 选取低温梯度、温度均匀的安装点,避免局部热冲击 正确的安装可最大程度降低外部振动对测量的干扰。 |
安装角度 | XY平面 ≤3° Y(俯仰)≤3° Z(偏航)≤3° | | 为保证姿态解算精度,IMU‑mount 的滚转、俯仰、偏航角误差应控制在 5° 以内。超过该范围会导致定位/姿态误差显著增大。 |
轴数 | LongAcc LatAcc YawRate | | ≥3轴 |
传输速度(更新) | 100Hz(CAN)报文延迟 ≤ 5 ms IPB:10ms 需要10ms内点火 | | 碰撞事件在毫秒级内完成,需要传感器能够在极短时间内提供完整的加速度/角速度曲线。 |
带宽 | 带宽:加速度 ≥ 2 kHz,陀螺仪 ≥ 500 Hz,以捕捉碰撞冲击的瞬时峰值 | | |
量程 | 纵向 ≥ ±200 g 横向 ≥ ±200 g YawRate ±245 deg/s(或更高) | | |
精度 | 陀螺仪: Bias instability 10°/hr Angle random walk 12 °/s/√h 加速度计: Bias instability 0.32mg ACC random walk 0.47mg/√Hz | 陀螺仪: Bias instability 1°/hr Angle random walk 0.21 °/s/√h 加速度计: Bias instability 0.2mg ACC random walk 0.3mg/√Hz | 加速度精度:0.0002g 角速度精度:0.01dps |
分辨率 | 陀螺仪:100 LSB/deg/s 加速度计:5000 LSB/g | • 加速度分辨率 ≤ 0.01 m/s²(≈ 1 mg) • 陀螺仪噪声密度 ≤ 0.004 deg/s/√Hz • 加速度噪声密度 ≤ 65 µg/√Hz | 高分辨率与低噪声保证在低冲击阈值(如轻微侧碰)时仍能可靠触发。 |
功能安全要求 | ASIL-D | | 提供内置自检、失效检测(失效安全模式) |
冗余要求 | 私CAN连接到IPB | | 推荐双 IMU 冗余架构,交叉校验以降低单点失效概率 |
校准与补偿 | • 出厂完成 3‑轴零偏、比例因子、交叉耦合校准;支持温度补偿 • 支持在线自校准或诊断指令,以便在维修/更换后快速恢复精度 | | 高精度校准是确保冲击阈值判定准确的前提。 |
5、自动驾驶中的IMU主要方案
自动驾驶中使用比较多的是村田SCHA634和导远电子 GST80
| 理想 Max | 小鹏 | 小米 | 比亚迪 仰望 |
|---|
IMU方案 | 导远 P-Box | 中海达 | 华测 独立IMU | 导远 P-Box |
备注 | 据报道:出于成本考虑,理想旗下车型将不再搭载P-Box,只保留零部件IMU模组 | | | 据报道:比亚迪也将去除P-Box |

图3 IMU上车情况Ref:
P-Box兴衰:导远、德赛西威与理想供应链的一个故事
《TDK InvenSense惯性测量单元(IMU)IAM-20685产品分析》
《博世MEMS惯性测量单元(IMU)SMI240产品分析》
《村田MEMS惯性测量单元(IMU)SCHA634产品分析》
https://www.st.com/en/mems-and-sensors/asm330lhh.html
https://pdf.dfcfw.com/pdf/H3_AP202210281579568565_1.pdf
 10个月宝宝每天需要喝多少奶粉?
10个月宝宝每天需要喝多少奶粉?
