在自动驾驶系统中,规划(Planning)模块扮演着承上启下的关键角色——它接收环境感知的信息,生成可执行的轨迹,并下发给车辆控制模块执行。
广义的规划可以分为3个部分:
路由寻径(Routing):即全局路径规划,类似于传统导航,结合高精地图中的车道、交通规则等信息,规划出从起点到终点的宏观路径。
行为决策(Behavioral Decision):在行驶过程中决定车辆的具体行为,例如跟车、等待行人、路口交互、变道超车等。
运动规划(Motion Planning):又称局部路径规划,负责生成未来一段时间内车辆期望行驶的轨迹(包含路径和速度信息),需满足车辆运动学/动力学约束、避障要求、舒适性指标等。
运动规划的本质是一个多目标数学优化问题,其核心目标包括:
安全性:避免与静态或动态障碍物碰撞,对于动态障碍物还需考虑其未来运动的不确定性,降低碰撞风险。
稳定性:轨迹必须符合车辆物理特性,确保控制器能够稳定跟踪。
舒适性:通过平滑的加/减速度和转向,提升乘客的乘坐体验。
时效性:在保证安全的前提下尽可能高效地到达目的地。
同时,规划过程需考虑多种物理约束,如加/减速度极限、非完整性约束(车辆只有两个控制自由度)、动力学约束(最大曲率、横摆角速度)等。在实际工程中,针对特定场景可适当简化模型。
本文详解当前主流的局部路径规划算法,包括基于图搜索、曲线拟合、数学优化、人工势场及采样等方法及应用。
一、基于图搜索的算法
图搜索算法将环境离散化为栅格或节点图,通过搜索算法寻找从起点到终点的最优路径。典型代表有Dijkstra和A*算法。
1.1 Dijkstra算法
Dijkstra是一种广度优先搜索算法,它以起点为中心向外层层扩展,直到扩展到目标点。该算法能够保证找到最短路径,成功率极高,但计算效率较低,尤其在高维栅格图中搜索速度较慢。
基本步骤:
初始化集合S(已确定最短路径的节点)和U(未确定节点),S中仅包含起点s。
从U中选出距离起点最近的节点u,将其加入S,并更新U中所有与u相邻节点的距离(若新路径更短)。
重复步骤2,直到U为空或目标点被加入S。
1.2 A*算法
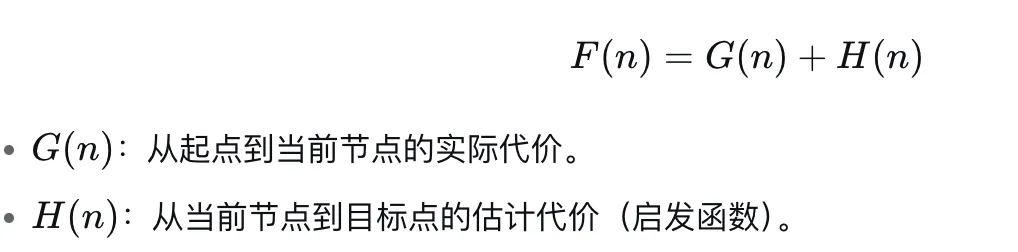
A*算法在Dijkstra的基础上引入了启发式函数(通常为当前节点到目标点的估计代价),形成深度优先的启发式搜索,大幅提升了搜索效率。其代价函数为:
基本步骤:
将起点加入Open List。
重复以下过程:
若不可通过或已在Close List中,忽略。
若不在Open List中,将其加入Open List,并设置当前节点为其父节点,计算G,H,F G、H、F。
若已在Open List中,检查经由当前节点到达该节点的路径是否更优(即GG值更小),若是,则更新其父节点和FF值。
当Open List为空或目标点被加入Close List时,从目标点回溯父节点至起点,得到最优路径。
对比:Dijkstra保证全局最优但速度慢,A*在合理启发函数下能快速找到较优路径,是实际导航系统(如手机地图)的基础算法。
应用:在自动驾驶中,路由寻径模块常采用A或其变种(如分层A、D* Lite)进行全局路径规划。而运动规划则需在全局路径基础上进一步细化轨迹,通常需要结合其他方法。
二、基于曲线拟合的算法
曲线拟合方法通过参数化曲线(如多项式、贝塞尔曲线等)生成平滑的局部路径,常用于路径平滑或特定场景(如泊车、换道)的轨迹生成。其核心目标是保证路径的几何连续性(如位置、方向、曲率连续),以提升车辆跟踪的可行性。
常见曲线类型:
余弦曲线:加速度在起止点取最大值,舒适性较差。
多项式曲线(如五次多项式):能够同时约束起止点的位置、速度和加速度,实现曲率连续变化,应用广泛。
圆弧及公切线:路径由直线和圆弧拼接而成,但曲率在连接点处突变,车辆需停车转向才能精确跟踪。
贝塞尔曲线:通过控制点调节曲线形状,可实现曲率变化率连续,常用于路径平滑。
B样条曲线:具备局部支撑性,可灵活调整局部形状,同时保证高阶连续性。
微分平坦:利用系统微分平坦特性,将轨迹规划问题转化为低维空间中的曲线设计。
应用场景:在自动泊车(APA)中,常采用Reeds-Shepp曲线(满足车辆最小转弯半径)或混合A*(结合图搜索与曲线拟合)生成可行路径;在换道场景中,常用多项式曲线规划平滑的换道轨迹。三、基于数学优化的算法
数学优化方法将轨迹规划建模为带约束的优化问题,通过求解最优控制问题得到轨迹。典型代表是百度Apollo的EM Planner和Lattice Planner。
3.1 EM Planner( Expectation-Maximization Planner)
EM Planner是Apollo中一种“轻决策重规划”的典型实现,它将路径规划和速度规划分层处理,并在SL(纵向-横向)坐标系和ST(纵向-时间)坐标系下分别进行决策和优化。
核心流程:
参考线生成:路由模块提供全局参考线,作为规划的基础。
路径规划(SL坐标系):
速度规划(ST坐标系):
优点:将高维问题分解为两个低维问题,计算效率高;通过DP保证可行解,通过QP提升平滑性。
3.2 Lattice Planner
Lattice Planner直接在时域内生成候选轨迹(路径+速度),通过采样横纵向偏移量生成一系列轨迹簇,然后根据代价函数(如安全、舒适、效率)选择最优轨迹。其优点是能直接处理动态障碍物,但采样密度影响计算量。
四、基于人工势场的算法
人工势场法(Artificial Potential Field, APF)将车辆在环境中的运动视为在虚拟力场中的受力运动:目标点产生“引力”,障碍物产生“斥力”,车辆在合力作用下运动至目标点。
优点:数学简洁,实时性好,适用于动态环境。
缺点:易陷入局部极小值(如U形障碍物前无法逃脱);在复杂环境中难以保证全局最优。
改进:通过引入随机扰动(如模拟退火)或结合全局引导势场,可缓解局部极小问题。
五、基于采样的算法
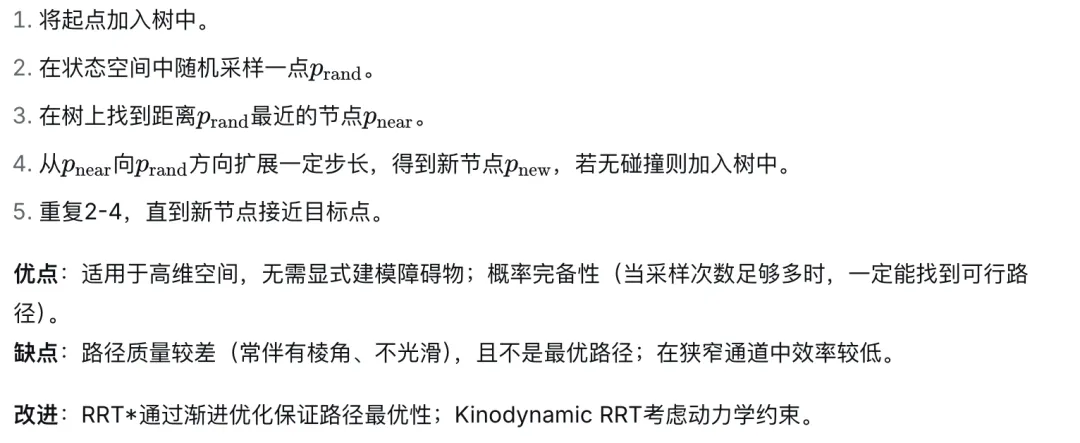
基于采样的方法通过在状态空间中随机采样,构建连通图或树,以找到可行路径。典型代表是快速扩展随机树(RRT)。
RRT算法
RRT从起点开始随机扩展节点,形成一棵树状结构,直到树梢到达目标区域。
六、实际场景应用
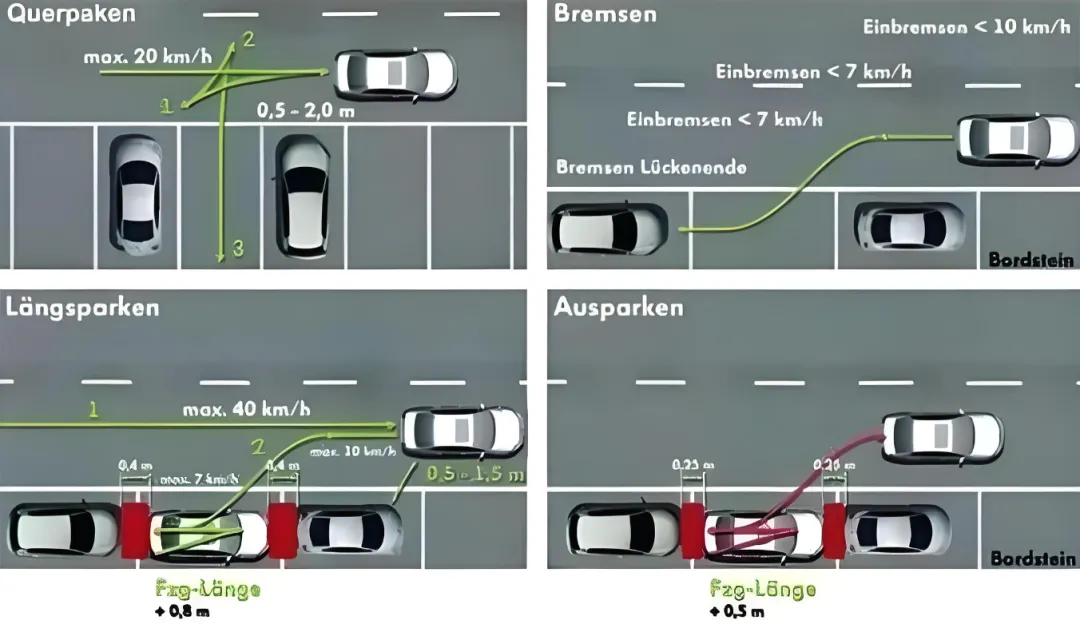
6.1 自动泊车(APA)
自动泊车是低速场景下的典型应用,对路径精度要求高,且需满足车辆最小转弯半径约束。常用方法包括:
6.2 换道场景
换道需在高速动态环境中快速决策并生成安全轨迹。常用方法:
七、总结与展望
本文综述了自动驾驶运动规划中的几类主流算法:
未来,运动规划的发展趋势包括:
深度融合学习:利用深度强化学习处理复杂交互场景,学习驾驶策略。
多传感器融合与不确定性建模:考虑感知不确定性,提升规划鲁棒性。
车路协同:借助V2X获取更广范围的交通信息,实现全局协同优化。
实时性与最优性的平衡:通过并行计算、轻量化优化算法,满足实时性要求。
附录:动态规划示例代码(贝尔曼最优原理)
% 贝尔曼最优原理示例:求解从A到J的最短路径(此处为最长路径示例)clear all; clc% 定义各层节点数(A-J每列节点数)num_states = [12331]; % 定义距离矩阵(四维,分别表示起始层、起始节点、目标层、目标节点)distance = inf(num_states); % A-Bdistance(1,1,2,1) = 12; % A-Cdistance(1,1,2,2) = 7; % B-D, B-E, B-Fdistance(2,1,3,1) = 5; distance(2,1,3,2) = 6; distance(2,1,3,3) = 9;% C-D, C-E, C-Fdistance(2,2,3,1) = 14; distance(2,2,3,2) = 10; distance(2,2,3,3) = 11;% D-G, D-H, D-Idistance(3,1,4,1) = 8; distance(3,1,4,2) = 7; distance(3,1,4,3) = 10;% E-G, E-H, E-Idistance(3,2,4,1) = 9; distance(3,2,4,2) = 7; distance(3,2,4,3) = 9;% F-G, F-H, F-Idistance(3,3,4,1) = 10; distance(3,3,4,2) = 7; distance(3,3,4,3) = 8;% G-J, H-J, I-Jdistance(4,1,5,1) = 5; distance(4,2,5,1) = 9; distance(4,3,5,1) = 8;%% 动态规划逆向求解(求最大成本路径)V = inf(5); % 价值函数矩阵,V(k,i)表示第k层第i节点的最优成本V(5,1) = 0; % J点成本为0fork=4:-1:1fori=1:num_states(k) path_len = zeros(num_states(k+1),1);forj=1:num_states(k+1) path_len(j) = distance(k,i,k+1,j) + V(k+1,j); end [V(k,i), ind] = max(path_len); % 取最大值(若求最短路径则用min) endend%% 显示最优成本disp(['Optimal cost at A: ', num2str(V(1,1))]);%% 回溯最优路径(按最大价值选择下一节点)optimal_path = zeros(5,1);fork=1:5 [~, optimal_path(k)] = max(V(k,:));enddisp('Optimal path (node index per layer):');disp(optimal_path');
该示例展示了动态规划在路径决策中的应用,实际运动规划中,DP常用于离散决策(如选择绕行哪一侧障碍物),QP用于连续平滑。
 10个月宝宝每天需要喝多少奶粉?
10个月宝宝每天需要喝多少奶粉?
