2026年,自动驾驶算法的"楚河汉界":华为、蔚来向左,小鹏、理想向右
2026年,自动驾驶告别了“该不该用端到端”的争论,迎来了真正意义上的技术分野之年。当大模型成为智驾系统的标配基座,曾经统一的算法路线开始分岔:一边是以小鹏、理想为代表的VLA大模型派,试图给汽车装上一个能“思考推理”的通用大脑;另一边则是华为、蔚来领衔的世界模型派,坚信驾驶的本质是对物理规律的深刻预判。这一派的核心思想是将大语言模型的"大脑"装进车里,让智驾系统不仅能看,还能像人一样思考和推理。
小鹏汽车:VLA大模型的坚定拥趸
核心技术:小鹏在2026年全面拥抱VLA(Vision-Language-Action,视觉-语言-动作)架构。其模型参数量高达数十亿级别,能够将摄像头捕捉的视觉信息,转化为带有语义理解的"语言",再基于大语言模型的逻辑推理能力,最终生成驾驶动作指令。
技术特点:强调"思维链"能力。例如,当车辆看到前方有一个临时放置的雪糕筒,VLA模型不是简单地识别它为"障碍物",而是能结合语言模型的知识,推理出"前方可能有施工,需要提前变道或减速观察",从而做出更拟人化的决策。
理想汽车:同样押注VLA路线
元戎启行:用VLA解决端到端"黑盒"问题
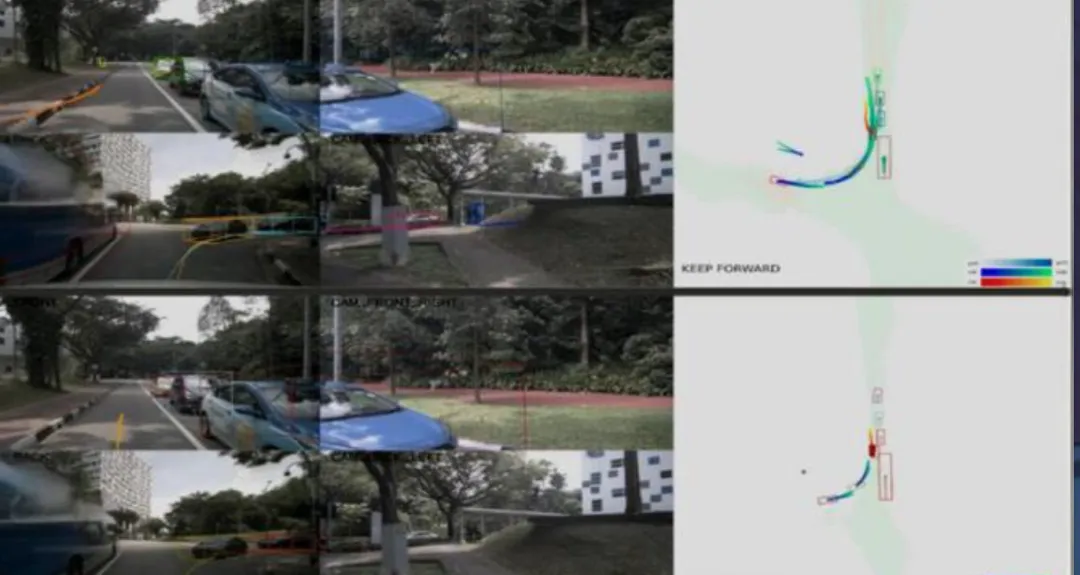
这一派认为,语言模型会产生延迟和误差,真正的驾驶应该基于对物理世界规律的深刻理解。他们追求的是一种能在脑海中"预演未来"的能力。
一段式端到端与强化学习派:追求极致的反应速度与数据效率
除了上述两大流派,还有一些企业在架构上追求极简,或在训练方法上追求极致的数据效率。
2026年的算法格局可以这样理解:
基座统一:所有玩家的算法基座都切换到了"端到端大模型",告别了过去的规则驱动时代。
路径分化:在统一的基座上,出现了VLA(赋予逻辑推理能力) 和世界模型(预演物理世界) 两大主要探索方向。VLA让车更聪明,世界模型让车更懂物理规律。
硬件协同:无论哪条路径,算法都开始与底层芯片(如地平线征程6、英伟达Thor)进行深度协同设计,以榨干每一分算力,降低延迟。
 10个月宝宝每天需要喝多少奶粉?
10个月宝宝每天需要喝多少奶粉?
