开过车的人都知道,路上最怕那种“差一点就撞上”的瞬间。方向盘猛地一抖,刹车踩得脚底板发麻,事后想想后背直冒冷汗。最近有个挺有意思的研究,清华大学的封硕副教授带着美国密歇根大学的团队,用一种“反着来”的思路,把这事儿给琢磨明白了。

咱们平时刷短视频,算法总爱推相似的内容,看得多了难免腻。自动驾驶的训练其实也有点这意思。以前为了让系统更安全,工程师们恨不得把所有路况都喂给它:晴天、雨天、堵车、高速,连极端天气下的事故视频都不放过。就像家里老式跷跷板,这边刚压下去,那边又翘起来——明明这个路口变安全了,下一个路口却突然冒出新问题。这就是业内头疼的“跷跷板效应”。
为啥会这样呢?打个比方,你要准备考试,面前堆着一万套模拟题。要是每道题都做一遍,效率低不说,还可能因为重复做简单题浪费时间,难的题又没吃透。传统方法盯着事故数据死磕,可事故本身太稀有了,模型学的时候容易“走偏”,光顾着防着那几类危险,反而把日常开车的流畅性给忘了。
封硕团队的解法挺有意思,他们不贪多,反而做起了“减法”。这方法叫“密集学习”,核心就一句话:别瞎学,挑最有用的学。就像考前突击,老师不让你刷整本练习册,只圈出几道典型例题,反复琢磨解题思路。他们发现,真正能让自动驾驶“开窍”的,不是已经发生的事故,而是那些“差点出事”的可避免风险。
为了验证这想法,团队搞了个“智能题库”系统。比如说,在高速上,前车突然急刹,后车需要同时判断距离、车速、旁边车道是否有车,这一系列操作稍有不慎就会追尾。这样一来,训练数据的“含金量”一下子就上去了,相当于给模型开了小灶。

效果咋样呢?后来把这套方法装到实车上,在密歇根的测试场跑,碰撞率从百万分之一点四降到千万分之一点四,差不多是原来的十分之一。更绝的是,不管是高速环岛还是城市拥堵路段,只要用了这种“密集学习”,事故率都能往下掉一大截。有个细节挺有意思,他们管这系统叫“安全教练”,平时不插手,一旦发现要出事,才赶紧接管。这跟咱们学车时教练在副驾坐着的道理有点像——平时自己开,关键时刻拉一把。
这研究能成,关键还是摸透了“稀疏性灾难”这个坎儿。以前模型学东西,全靠海量数据里的“信号”,可安全相关的关键信号太弱了,容易被噪音淹没。现在通过精准筛选,相当于把信号放大了,模型学起来更带劲。封硕说,这方法不光能用在自动驾驶,以后像医疗机器人、航天设备这些容不得半点闪失的领域,说不定也能用得上。毕竟不管啥AI,想让人放心,都得先过了“安全”这道关。
说起来,自动驾驶这几年进步确实快,可安全这事儿就像悬在头顶的达摩克利斯之剑。以前大家总想着“多学多练”,现在发现“会学巧学”更重要。就像咱们学手艺,光埋头干活不行,得琢磨门道。清华这波操作,算是给行业指了条新路:别光盯着数据量,得看数据“质”。把那些“险些出事”的瞬间变成模型成长的养料,这比堆多少事故视频都管用。
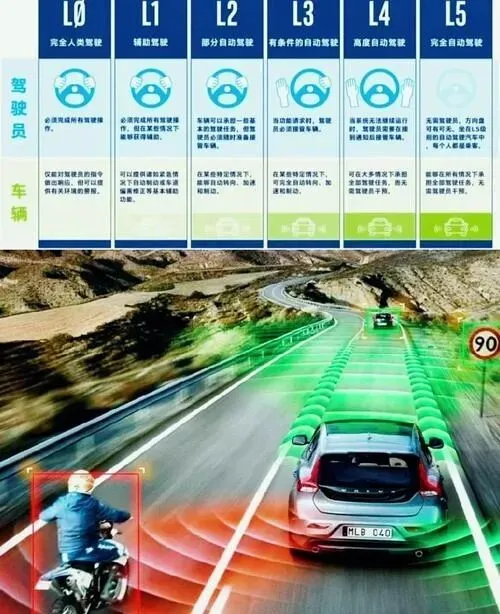
现在不少车企都在谈L4级自动驾驶,可真要上路,老百姓心里那根弦儿始终绷着。谁也不想坐个车,系统平时开得挺顺,冷不丁在个没见过的路口“犯迷糊”。封硕团队这研究,算是给这根弦儿松了松。他们用“减法”破了“跷跷板”的局,让模型在安全上能“稳扎稳打”,而不是“拆东墙补西墙”。以后要是真能把这套方法用到量产车上,咱们离“放手让车自己开”的那天,可能又近了一步。
这事儿也让我想起小时候学骑自行车,摔两跤就会了,可真正记住的不是怎么摔的,而是怎么在要摔的时候调整重心。自动驾驶学“避险”,大概也是这个道理。与其等出了事再补救,不如提前从“险些出事”的经历里攒经验。毕竟,对开车的人来说,“没出事”才是最实在的安全感。

