在自动驾驶测试领域,经常会听到几个概念:
实车测试、台架测试、仿真测试、软件测试(SIL)
很多人知道这些名词,但很难说清楚它们之间到底有什么区别,以及各自的作用是什么。
这篇文章只做一件事——把这几种测试方式放在同一框架下,讲清楚它们的差异与关系。
一、先说结论:这是一个“分层验证体系”
自动驾驶测试并不是单一方式,而是一个逐层递进的验证体系:
软件测试(SIL) → 仿真测试 → 台架测试(HIL) → 实车测试
从左到右:

二、四种测试方式分别在做什么?
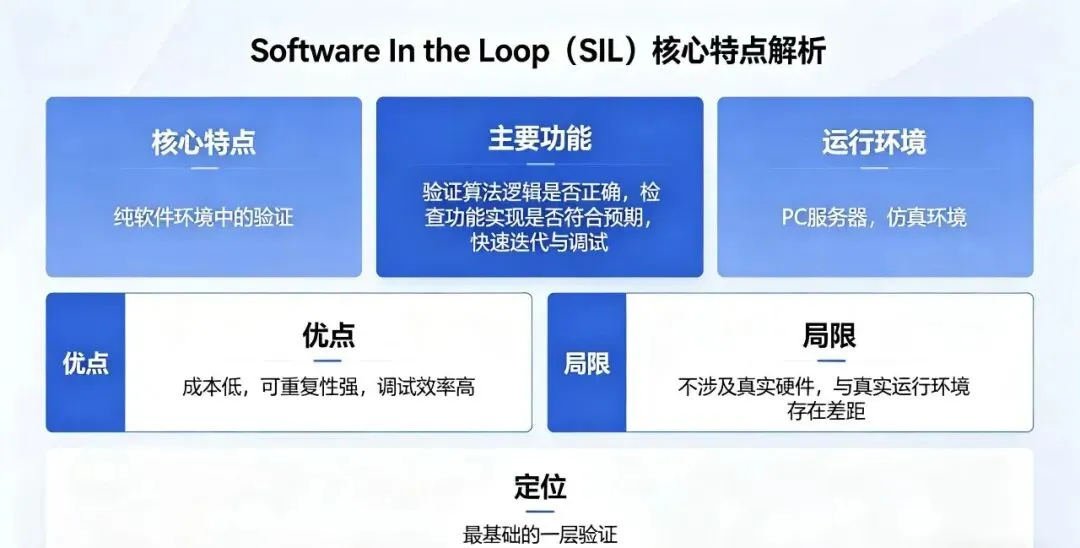
1. 软件测试(SIL)
SIL(Software In the Loop)的核心特点是:纯软件环境中的验证
主要做什么?
验证算法逻辑是否正确
检查功能实现是否符合预期
快速迭代与调试
运行环境通常是:
优点:
局限:
可以理解为:最基础的一层验证。
2. 仿真测试
仿真测试是在虚拟环境中构建“接近真实”的场景,例如:
主要做什么?
验证系统在复杂场景中的表现
构造大量边缘场景(Corner Case)
提高测试覆盖率
优点:
局限:
可以理解为:在“可控世界”中验证系统能力。

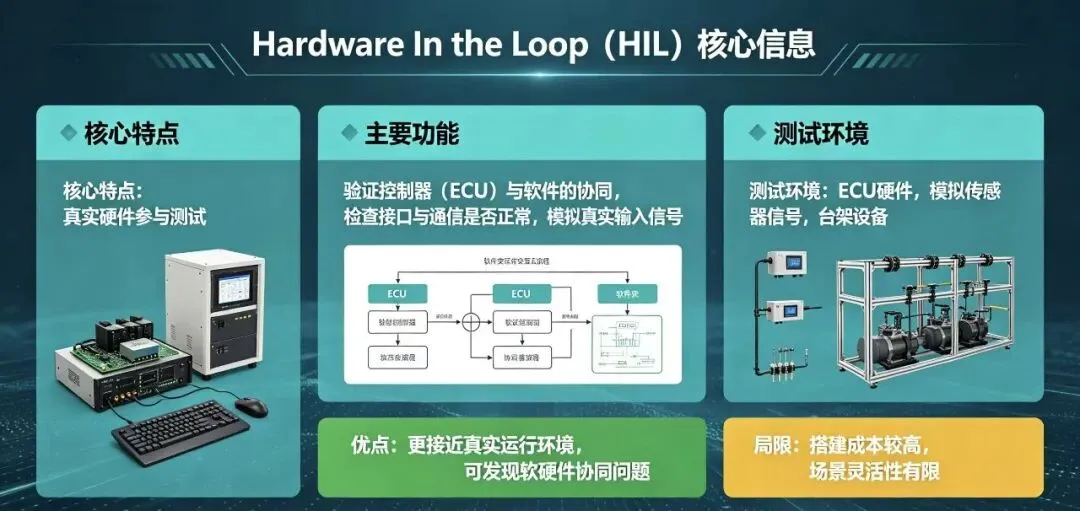
3. 台架测试(HIL)
HIL(Hardware In the Loop)的核心特点是:真实硬件参与测试
主要做什么?
验证控制器(ECU)与软件的协同
检查接口与通信是否正常
模拟真实输入信号
测试环境通常包括:
优点:
局限:
可以理解为:“半真实环境”的验证阶段。
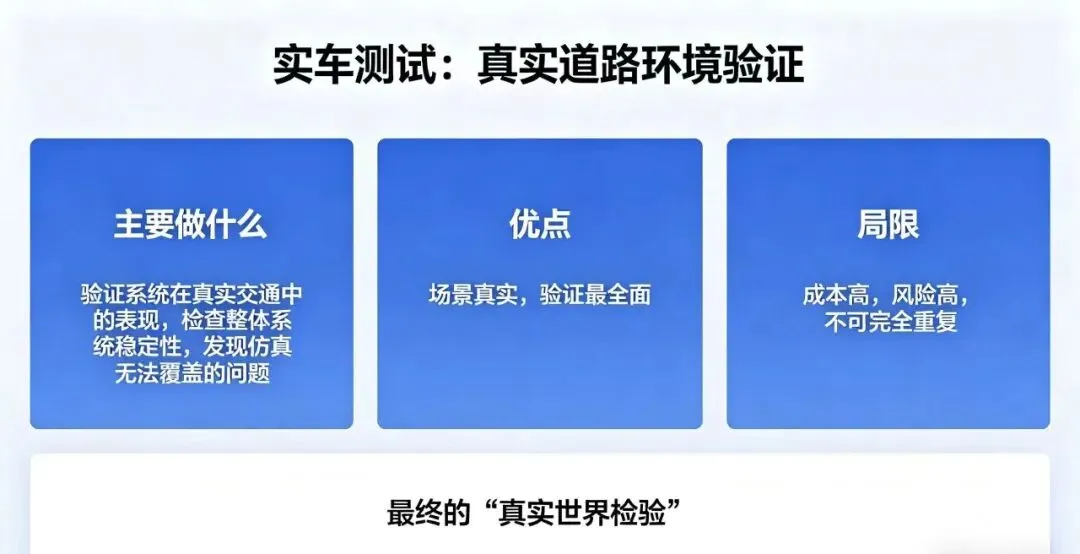
4. 实车测试
实车测试是在真实道路环境中进行验证。
主要做什么?
验证系统在真实交通中的表现
检查整体系统稳定性
发现仿真无法覆盖的问题
优点:
局限:
可以理解为:最终的“真实世界检验”。
三、四种测试方式的核心差异
可以用一个简单对比来理解:
四、为什么必须分这么多层?
原因很简单:没有任何一种测试方式,可以单独覆盖所有问题。
例如:
软件测试可以快速发现逻辑错误,但无法验证硬件问题
仿真可以覆盖极端场景,但不完全真实
实车最真实,但无法高频复现问题
因此,需要通过多层测试逐步筛选问题:低成本阶段发现大部分问题,高成本阶段做最终验证。
五、实际项目中是如何配合的?
在实际开发流程中,通常是这样的节奏:
在软件测试阶段修复基础问题
在仿真阶段验证复杂场景
在台架阶段验证硬件与系统
在实车阶段做最终确认
这是一个:逐步收敛风险的过程。
六、总结
可以用一句话总结四种测试方式:
软件测试:验证逻辑仿真测试:验证场景台架测试:验证系统实车测试:验证真实世界
而从整体来看:自动驾驶测试的核心,不是某一种方式,而是多层验证体系的组合。
如果你刚进入自动驾驶测试领域,建议优先理解这套测试体系,而不是只关注某一种测试方式。