🚗🔥 别再纠结了!智能座舱&自动驾驶里,D-PHY 和 C-PHY 到底谁更猛?
很多人一上来就问:
👉 C-PHY是不是更高级?
👉 D-PHY是不是要被淘汰?
👉 自动驾驶是不是都在用C-PHY?
🎯 现在量产最多:D-PHY
🚀 未来增长最快:C-PHY
🧠 真正抗干扰:看整车架构,不只看PHY
如果你只记一句话:
👉 D-PHY是“老炮儿”,C-PHY是“潜力股”,A-PHY才是“车规大佬”。
下面带你一口气讲透。
🧠 一、车里的高速链路,到底在干嘛?
简单理解:
问题来了:
👉 摄像头在车尾,SoC在中控,中间隔几米线
👉 数据还是4K / 多摄 / HDR
你要怎么传?
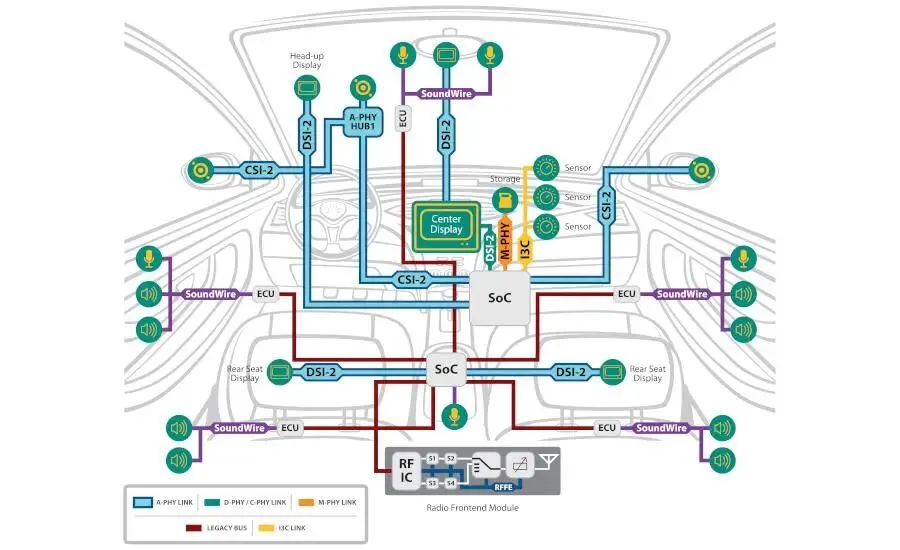
这就是为什么车里不是单一接口,而是:
摄像头 →(D/C-PHY)→ SerDes →(同轴)→ SoC →(D/C-PHY)→ 屏幕
🔍 深度一句话
👉 D/C-PHY负责“板内高速”,SerDes/A-PHY负责“跨车高速”
别搞混,这是很多人理解错的根源。
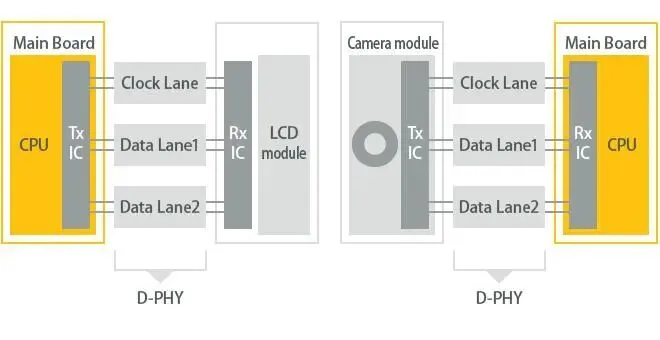
⚡ 二、D-PHY:为什么它还在统治车载?
👉 D-PHY = 最稳的那个老工程师
它不一定最先进,但它:
🎯 为什么它这么“抗打”?
因为它结构简单:
R_total = N_lane × R_lane
比如:
🔍 深度理解
为什么很多智能座舱和 ADAS 项目,最后还是回到 D-PHY?
因为它太像“标准答案”了。
举个很实际的例子:
很多车载摄像头并不是直接把 sensor 连到主 SoC,而是先过 GMSL / FPD-Link 这类 SerDes,再由解串器输出 CSI-2 给 SoC。TI 的四摄像头 ADAS 参考设计,就是典型的 多路相机通过同轴进来,最后输出 MIPI CSI-2 给处理器。
而在这些系统里,落地时你经常会发现:
SoC 端对 D-PHY 支持最全,解串器出来的链路调试资料更多,示波器、探头、一致性测试经验更成熟,Layout 团队对 D-PHY 的阻抗和走线规则更熟。
这就像你打比赛,C-PHY 可能是潜力新秀,但 D-PHY 是那个“已经打了五年主力的老队员”。
它不一定最炫,但关键比赛更稳。
“智能座舱和无人驾驶谁用得多”,今天从量产和可落地角度看,D-PHY 还是更常见。
👉 90%概率还在用D-PHY
因为一句话:
🔥 能稳定量产的,才是好方案
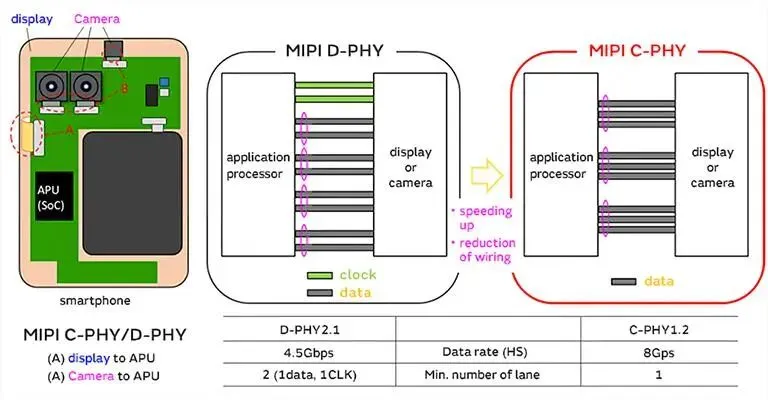
🚀 三、C-PHY:为什么大家都在吹它?
C-PHY第一次看很奇怪:
👉 不是差分?
👉 三根线一组?
没错,它是这么玩的:
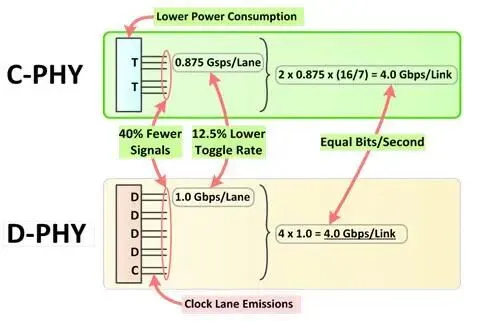
效率 ≈ 2.28 ~ 3.5 bits/symbol
👉 比D-PHY更高!
🎯 核心优势
🔍 深度理解(关键)
D-PHY像:
👉 两车道高速公路
C-PHY像:
👉 立体三车道+智能调度系统
不是“多一根线”,而是:
👉 编码方式彻底换了
🚗 什么时候必须上C-PHY?
当你遇到:
👉 这时候C-PHY开始香了
深度讲解
你可以把 D-PHY 理解成“传统双车道高速路”,
而 C-PHY 更像“重新设计过交通规则的三车道立交”。
它不是简单靠“多一根线”提性能,而是靠编码效率提升吞吐。
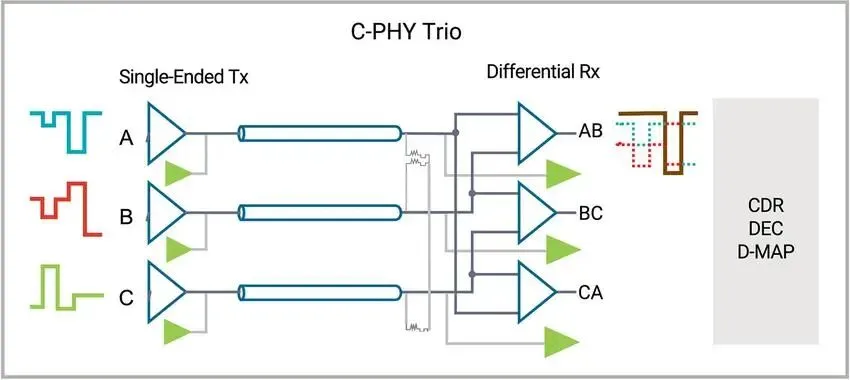
MIPI 官方写的:
C-PHY 使用三线一组的 trio
采用嵌入时钟6-wirestate 模式下编码效率约 2.28 bits/symbol 18-wirestate 模式下可到 3.556 bits/symbol 单链路最高速率能提升到更高水平。
这意味着什么?
同样的数据量,C-PHY 往往可以用更少的有效连线、更低的符号速率去完成。对于车载这种对线束、EMI、功耗都很敏感的系统,这就很有诱惑力。
尤其是当摄像头像素越来越高、HDR 越来越猛、帧率越来越高时,D-PHY 也不是不能干,但它会开始面临:
lane 数上去
时钟压力上去
EMI 风险上去
PCB 走线和连接器压力变大
这时候 C-PHY 就开始显得很香。
所以,C-PHY 不是“有没有必要学”的问题,而是你做高端项目迟早会碰到。
🛡️ 四、谁抗干扰更强?别被带偏了
很多文章喜欢一句话:
👉 “C-PHY抗干扰更强”
这句话——不完整。
🎯 正确说法:
✔ 板内(短距离)
👉 C-PHY通常更优(EMI更低)
❌ 整车(长距离)
👉 决定胜负的不是D还是C,而是:
🔍 举个真实场景
车尾摄像头 → 中控:
你用的是:
👉 那这里的“抗干扰能力”:
跟D-PHY / C-PHY关系已经很小了
🔥
🚗 PHY只是局部,整车抗干扰是系统工程
📊 五、我们最关心:到底怎么选?
👇
🎯 选 D-PHY
👉 ✔ 绝大多数座舱项目
🚀 选 C-PHY
👉 ✔ 高阶ADAS / 新平台
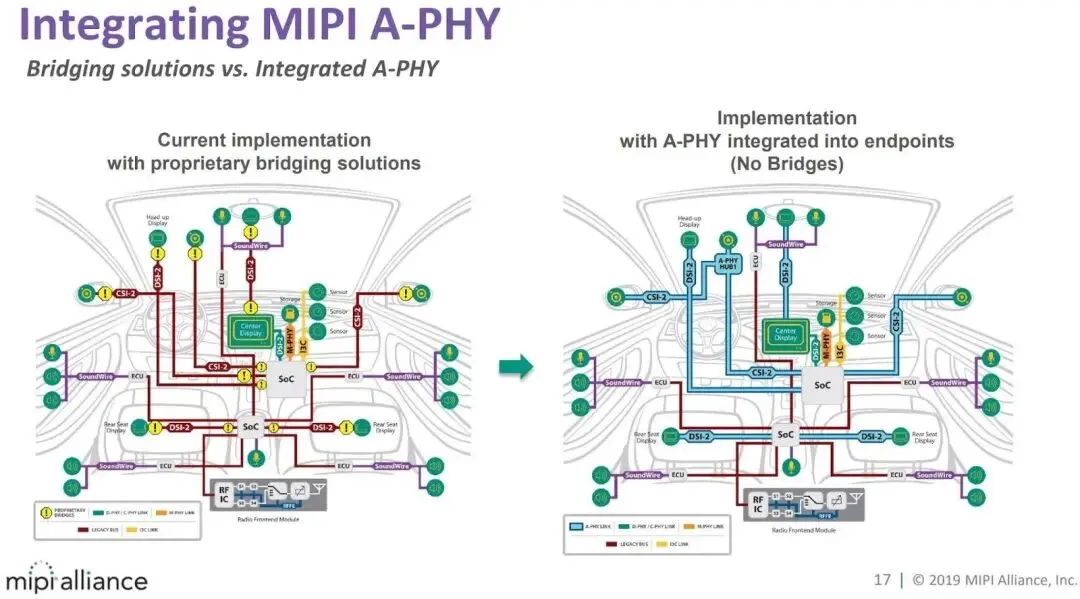
🧠 上 SerDes / A-PHY
👉 ✔ 自动驾驶系统
 10个月宝宝每天需要喝多少奶粉?
10个月宝宝每天需要喝多少奶粉?
