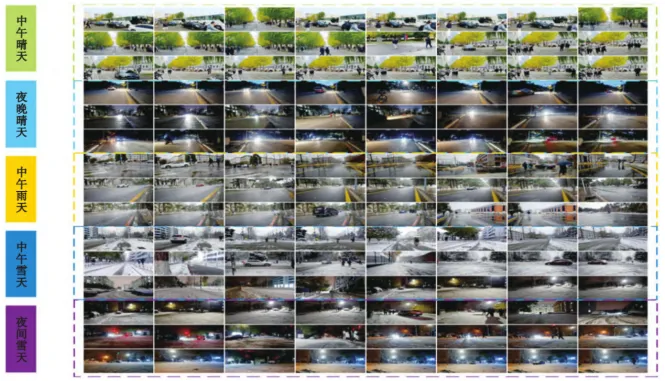
图1为自建数据集的部分图像,涵盖了4种典型场景:中午晴天、夜晚晴天、中午雨天、中午雪天。该数据集共包含3567张图像,涵盖不同光照度、不同天气、不同人群密度等复杂环境,包含行人、车辆、自行车等各类目标,以及不同尺寸和遮挡程度的目标,用于微调算法模型,解决数据不均衡问题,确保实验结果的可靠性和通用性。
图1 自建数据集部分图像
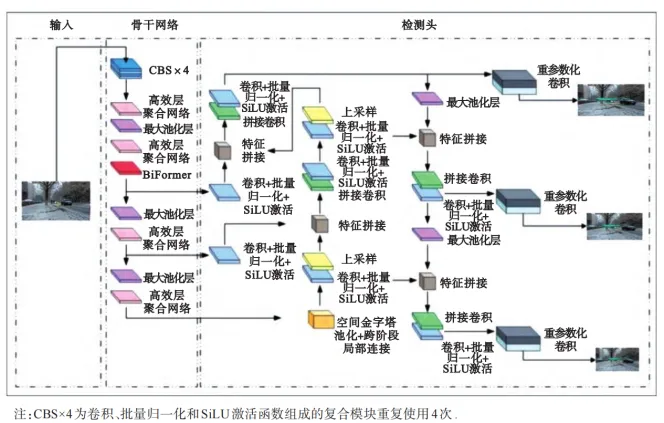
图2为BiFormer-YOLO算法的结构示意图,清晰呈现了该算法的完整流程:从输入图像开始,经过骨干网络进行特征提取,通过聚合网络、高效层、BiFormer模块等完成特征处理,再经过上采样、特征拼接、卷积等操作,最终通过检测头输出目标检测结果。其中,CBS×4为卷积、批量归一化和SiLU激活函数组成的复合模块,重复使用4次,是算法特征提取的核心组件之一,BiFormer模块则负责实现感兴趣区域的精准提取和自注意力特征计算。
图2 BiFormer-YOLO算法结构示意图
图3为YOLOv7与BiFormer-YOLO两种算法在5种不同场景下的区域提取对比,分别展示了中午晴天、夜晚晴天、中午雨天、中午雪天、夜间雪天的检测效果。通过对比可见,YOLOv7算法在不利天气(雨天、雪天)和低光照(夜晚)场景下,区域提取精度较低,易受环境干扰;而BiFormer-YOLO算法在各类场景下,均能更精准地提取目标区域,有效减少环境因素对检测效果的影响,体现了改进算法的优越性。
图3 YOLOv7与BiFormer-YOLO区域提取对比
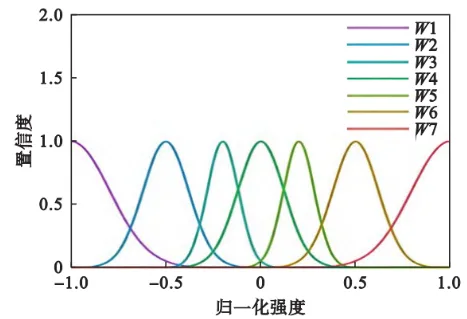
图4为天气条件隶属度函数,横坐标为天气强度归一化值,纵坐标为信度相关指标,用于量化不同天气条件与模糊集的关联程度。其中,归一化值对应不同天气强度,小雨、中雨、大雨的强度值分别为-0.2,-0.5,-1.0;晴天对应的强度值为0;小雪、中雪、大雪的强度值对应为 0.2,0.5,1.0,通过该函数可精准判断当前天气状态,为动态权重分配提供天气维度的支撑。
图4 天气条件隶属度函数
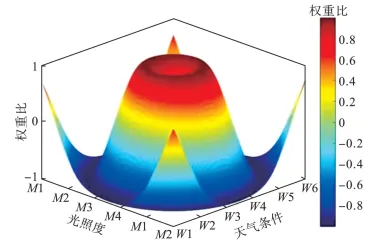
图5为模糊规则下的权重空间,展示了不同光照度(M1~M4)和不同天气条件(W1~W7)对应的融合权重比( ,其中α为相机融合权重,β为2D激光雷达融合权重)。该图清晰呈现了光照度和天气条件对融合权重的影响规律,可根据当前场景的光照和天气状态,通过权重空间确定最优的融合权重分配方案。
,其中α为相机融合权重,β为2D激光雷达融合权重)。该图清晰呈现了光照度和天气条件对融合权重的影响规律,可根据当前场景的光照和天气状态,通过权重空间确定最优的融合权重分配方案。
图5 模糊规则下的权重空间
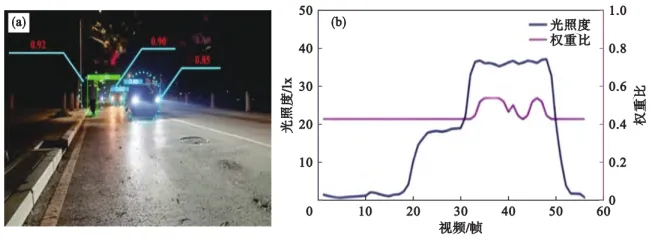
图6为夜晚晴天对向来车场景检测结果,图6a为融合算法检测结果,清晰标注了检测到的行人、车辆等目标及对应检测精度;图6b为权重比与光照度变化曲线。该场景下光照度为0~40 lx,伴随对向来车强光,从曲线可见,权重比随光照度变化及时调整,确保了检测精度,其中行人检测精度0.92、黑色车辆检测精度为0.85,远处车辆检测精度为0.90。
图6 夜晚晴天对向来车场景检测结果
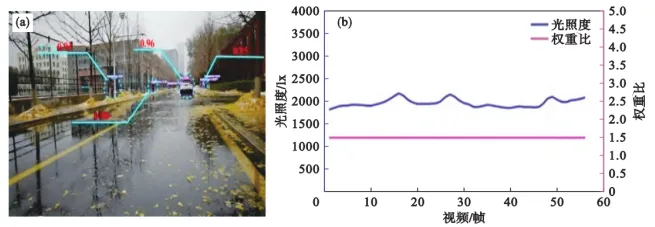
图7为雨天阴暗场景检测结果,图7a为融合算法检测结果,标注了不同目标的检测精度,包括左侧路灯和树木遮挡的行人(0.93)、前方白色车辆(0.96)、远处行人(0.90和0.85);图7b为权重比与光照度变化曲线,该场景下光照度为1。
图7 雨天阴暗场景检测结果










 10个月宝宝每天需要喝多少奶粉?
10个月宝宝每天需要喝多少奶粉?
