别再把NCA当自动驾驶了!一文看懂城区领航辅助的底层逻辑
- 2026-05-14 07:07:25
 "
"如果把高速辅助驾驶比作“相对标准化的考场”,那么城区NCA更像是一场随时变化的综合实战。它不只是让车“自己往前开”,而是要在红绿灯、行人、非机动车、路口博弈、拥堵跟车等复杂环境中,持续做出尽量安全、平顺、合理的辅助驾驶动作。

图1全场景城区NCA领航辅助技术原理总览(AI生成配图)
01
—
NCA到底是什么?先把它理解对
很多人一听“NCA”,会直接把它理解成“自动驾驶”。其实更准确的说法是:它本质上仍属于高级辅助驾驶/领航辅助能力,系统能够在设定条件下帮助驾驶员完成跟车、变道、路口通行、绕行等一系列驾驶任务,但驾驶员仍然必须保持注意力,并在需要时随时接管。
简单说,城区NCA想做的事情,可以概括成三步:先看懂 周围发生了什么,再判断 下一步该怎么走,最后再控制 车辆把动作稳稳执行出来。
• 感知层:识别车辆、行人、骑行者、车道线、红绿灯、路缘、障碍物。
• 决策层:分析当前交通关系,决定跟车、让行、变道、通行还是减速等待。
• 执行层:把决策变成转向、加速、制动等实际动作,并持续监测风险。
02
—
它靠什么“看见路”?系统组成拆开看
一辆能跑城区NCA的车,不是只靠一个摄像头或者一颗芯片,而是依赖一整套协同系统。常见的组合包括摄像头、激光雷达、毫米波雷达、超声波雷达、定位单元、中央计算平台、高精地图/导航以及线控制动转向系统。

图2城区NCA系统组成拆解
可以把它们理解成一个团队:摄像头像眼睛,更擅长识别红绿灯、车道线和目标类别;雷达像“第二套感官”,更擅长测距离、测速、看三维轮廓;定位与地图像导航大脑,负责告诉系统“我现在在哪、前面道路是什么结构”;而中央计算平台则负责把所有信息融合起来,尽快算出一个可执行答案。
|
|
图3视觉感知示意:系统会实时识别前车、交通灯与目标框 | 图4高精地图/点云示意:地图与环境模型帮助车辆理解道路结构 |
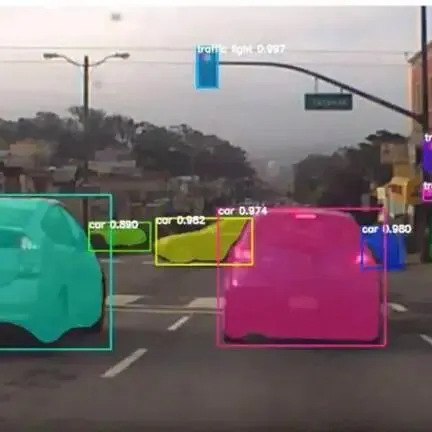
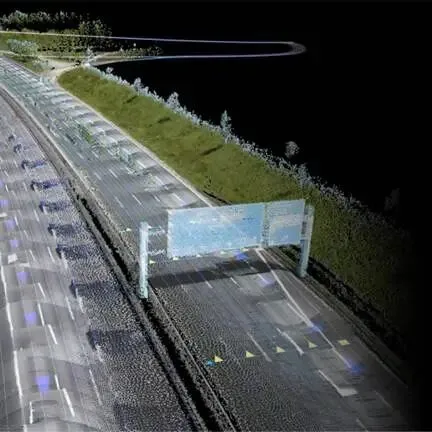
一句话理解前端“看得见”,后端“算得快”,执行端“跟得稳”,这才是城区NCA真正能工作起来的基础。 |
03
—
城区NCA不是“看一眼就做一次决定”,而是一个持续循环、毫秒级刷新 的闭环。每一轮大致都要经历:感知采集 → 环境建模 → 目标预测 → 行为决策 → 轨迹规划 → 车辆控制 → 反馈迭代。

图5从感知到控制的闭环流程
• 感知采集:采集前车、侧后方、路口、灯态、行人、自行车等环境信息。
• 环境建模:把分散的传感器数据融合成“我周围发生了什么”的统一场景。
• 目标预测:判断前车会不会减速,行人会不会横穿,非机动车是不是要切进来。
• 行为决策 + 轨迹规划:确定当前该跟车、让行、变道还是等待,并生成一条平顺可执行的轨迹。
• 车辆控制:把轨迹变成转向、油门、制动动作,同时继续监控风险。
很多人觉得“辅助驾驶像魔法”,其实本质上就是:不停采集 → 不停理解 → 不停预测 → 不停修正。所以它能不能开得好,不只看单次识别准不准,更看整条闭环是否稳定。
04
—
城区为什么更难?典型场景一多,难度就上来了
自动驾驶到底该不该上激光雷达?一张图讲清视觉方案和激光雷达方案
相比高速,城区的挑战在于目标更多、规则更复杂、变化更快。红绿灯、无保护左转、变道超车、行人横穿、环岛掉头、拥堵跟车,每一个场景都不是“一本道路”那么简单。
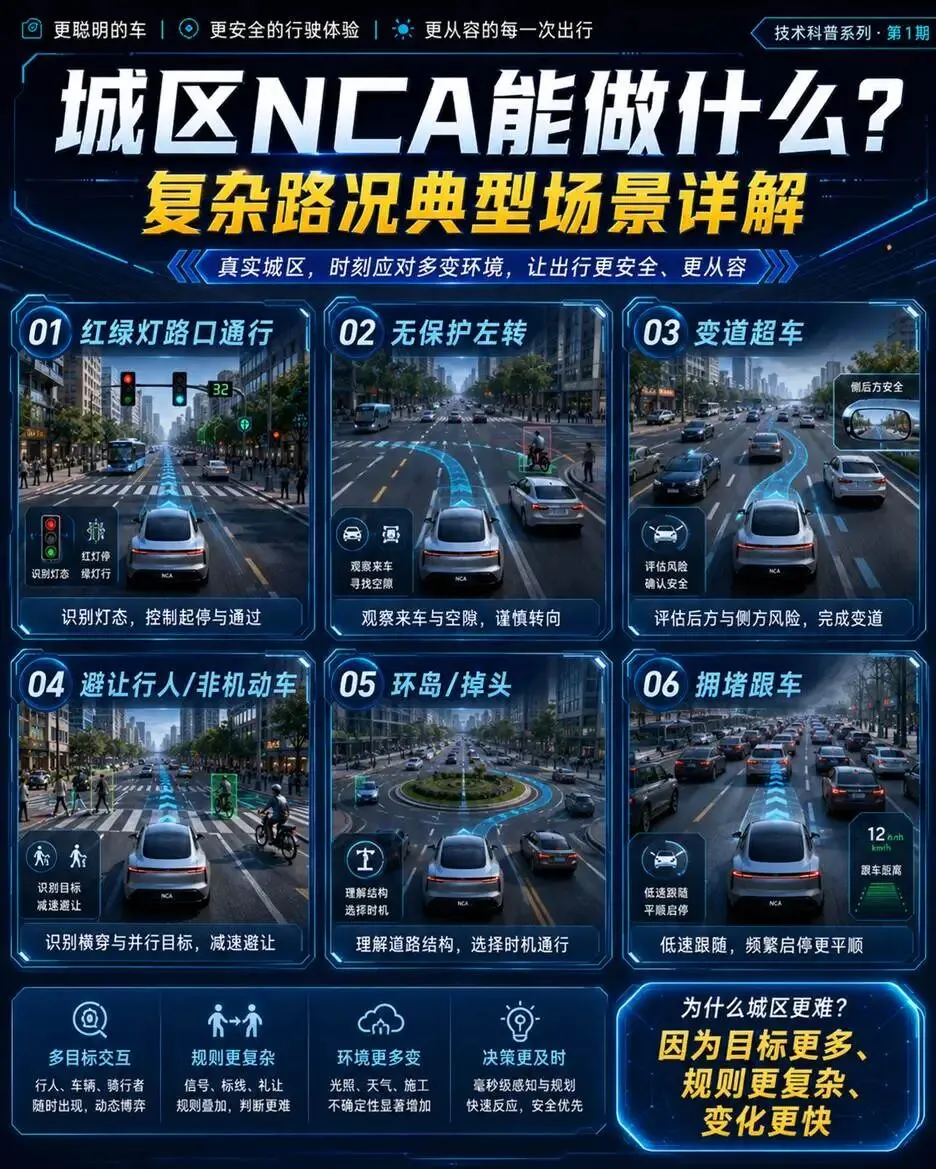
图6城区NCA常见典型场景(AI生成配图)
比如在无保护左转 场景下,系统不仅要看对向来车,还要看行人和非机动车;在拥堵跟车时,又要兼顾低速平顺性,避免一脚一脚“点头式”刹车;到了环岛/掉头,还要理解多出口道路结构和周围动态交通参与者的意图。
所以你会发现,城区NCA的难点不是“车会不会走”,而是在复杂博弈里,怎么尽量走得更像一个经验不错、风格稳妥的驾驶员。
05
—
能力边界:它不是万能钥匙,安全接管永远重要
数据不能随便给,但可以安全用:一张图讲清楚数据沙箱与隐私计算
再强的辅助驾驶,也一定有边界。复杂施工、暴雨浓雾、强逆光、交通警察临时指挥、超复杂混行、地图异常、驾驶员分心,这些都会显著增加系统负担。

图7NCA能力边界与安全接管(AI生成配图)
• 该接管的时候要果断接管,尤其是在系统已经提示风险、道路环境明显异常的时候。
• 手不要长期离开方向盘,目光也不要脱离道路环境。
• 不要过度依赖“会自己开”这件事,辅助驾驶的价值是减负,不是替代责任。
最重要的一句话本质上它仍然是辅助驾驶,安全责任仍然在驾驶员。 |
06
—
城区NCA到底厉害在哪?
如果用一句最通俗的话来解释:城区NCA的价值,不是让车“炫技”,而是让车辆在复杂城区里,尽量更早看见风险、更快理解局面、更稳做出动作。
它真正厉害的地方,不是某个单一功能,而是把多传感器感知、地图定位、预测规划、车辆控制和风险监测串成了一套闭环系统。你可以把它当成一个“持续在线的辅助驾驶副驾”,但方向盘背后最关键的人,仍然是你。
适合做封面摘要/导语 |
随机文章
-
 10个月宝宝每天需要喝多少奶粉?
10个月宝宝每天需要喝多少奶粉?
- 全尺寸SUV看着很上头,但真正适合你的未必是最大那台
- 18.98万起,方盒子硬派SUV 5月15日正式上市
- 本月将上市3款大七座SUV,哪一款你会考虑入手?
- 港股打新|驭势科技招股:自动驾驶商业化先行者
- 坦克300Hi4-T 硬派潮玩越野SUV
- 2026款丰田荣放:想买省心家用SUV的人,能忍下内饰和隔音这笔账吗?
- 沃尔沃XC60:这台豪华SUV,凭什么让无数车主“真香”?
- 捷途X70L 11.59万元起:家用SUV看着很全,但普通家庭最该先想清楚一件事
- C 260 L运动轿车特别版,臻选配置,重装上阵
- 10万级SUV怎么选:博越L、CS75PLUS、哈弗H6、瑞虎8、锋兰达,真正差别不在配置表上
