随着人工智能、传感器与大数据技术的快速迭代,全自动驾驶从概念设想逐步走向现实落地,但其整体发展进程仍处于局部成熟、全域待突破的关键过渡期。按照国际通用的自动驾驶分级标准,L0至L2属于辅助驾驶,L3开始迈入有条件自动驾驶范畴,而大众普遍期待的L4高度自动驾驶、L5完全全自动驾驶,至今仍未实现全面商业化普及。当前全球主流车企与科技企业的研发成果,大多集中在L2+辅助驾驶向L3有条件自动驾驶跨越的阶段,部分封闭场景与特定区域已实现小规模L4试运行,但距离真正无任何限制、全场景通用的全自动驾驶,仍存在明显的技术鸿沟与现实阻碍。整体来看,全自动驾驶尚未进入成熟落地阶段,正处在技术攻坚、场景验证、法规完善的核心攻坚期。
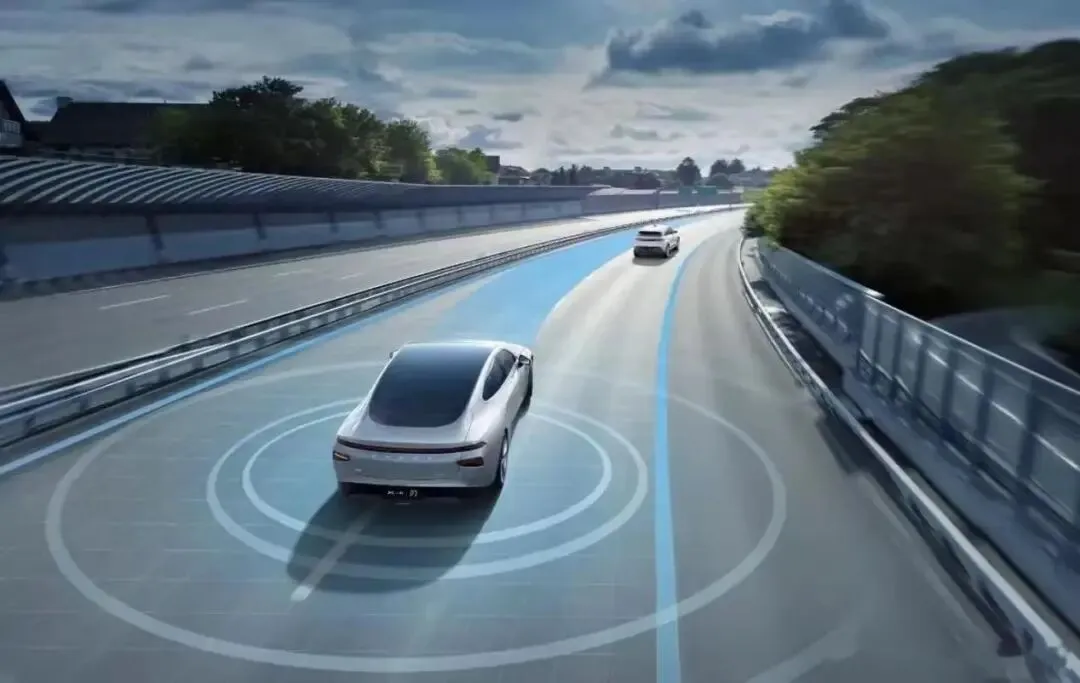
从核心技术落地现状来看,当前全自动驾驶呈现场景分化明显、能力边界清晰的特征。在封闭园区、港口码头、固定路线公交、高速干线物流等结构化简单场景中,L4级自动驾驶技术已基本趋于成熟,车辆可脱离人类干预自主完成行驶、避让、启停等操作,商业化试点项目持续落地,部分企业已实现小规模商业运营。但在城市复杂路况、雨雪雾恶劣天气、突发道路施工、行人不规则穿行等非结构化开放场景下,全自动驾驶系统仍存在显著短板。当前主流自动驾驶系统依赖摄像头、毫米波雷达、激光雷达多传感器融合感知,虽然硬件配置不断升级,但面对极端路况、未知突发状况时,系统的决策预判能力远不及人类驾驶员,感知盲区、决策延迟、逻辑僵化等问题频发,导致全自动驾驶无法直接进入城市全域道路。简单来说,全自动驾驶仅在简单可控场景实现可用,复杂开放场景仍停留在测试验证阶段。
算法与决策系统的局限性,是制约全自动驾驶迈向成熟的核心技术瓶颈。当前自动驾驶算法以深度学习为核心,通过海量道路数据训练模型实现感知与决策,但这种数据驱动模式存在天然缺陷:算法只能基于已学习过的路况做出判断,面对从未见过的极端场景极易出现决策失误。人类驾驶员可以凭借生活常识、逻辑推理快速处理突发意外,而自动驾驶系统缺乏真正的通用人工智能,无法灵活应对超出训练数据范围的状况。同时,车路协同技术尚未全面普及,单一车辆自动驾驶存在视野局限,若无法实现车与车、车与道路设施、车与云端数据的实时互通,系统很难提前预判远距离风险。算法泛化能力不足、车路协同基础设施不完善,使得全自动驾驶的安全冗余度始终无法达到人类驾驶的水平,这也是其无法全面开放使用的关键原因。
除技术本身外,法规标准、安全责任与成本问题,进一步延缓了全自动驾驶的商业化进程。目前全球范围内尚未形成统一的全自动驾驶法规体系,L3及以上自动驾驶发生交通事故时,责任界定一直是行业争议焦点,是车企、算法研发方还是使用者承担责任,尚无明确法律定论。同时,全自动驾驶的安全认证体系缺失,如何判定系统是否具备上路资格、安全测试标准如何制定,都处于空白阶段。从成本层面来看,搭载激光雷达、高性能芯片的自动驾驶车辆,硬件成本居高不下,远超普通家用车价格,难以实现大规模普及。此外,公众对全自动驾驶的安全信任度不足,一旦出现安全事故便会引发舆论质疑,也在一定程度上影响技术落地的节奏。多重外部因素叠加,让全自动驾驶即便在技术层面取得突破,也难以快速走进大众生活。
展望未来发展趋势,全自动驾驶将遵循先场景落地、再全域普及的渐进式发展路径。短期3至5年内,L2+辅助驾驶仍会是市场主流,L3级有条件自动驾驶会在部分城市高速路段逐步放开,特定场景下的L4自动驾驶商业化规模持续扩大,技术将聚焦于优化算法泛化能力、降低传感器成本、完善车路协同基础设施。中长期来看,随着通用人工智能技术突破、全国统一法规落地、道路智能化改造完成,全自动驾驶将逐步攻克复杂城市路况难题,但真正实现L5级完全全自动驾驶,至少需要十年以上时间。总体而言,全自动驾驶正处于黎明前的攻坚阶段,技术框架已搭建完成,局部场景验证成功,但距离全面成熟、全民可用,仍需在技术迭代、法规完善、成本优化等多方面持续深耕,其最终普及注定是一个循序渐进、稳步推进的漫长过程。