1. 安全升级:从人为经验预判到机器量化风控
传统道路交通安全隐患,本质源于人类感知阈值有限、反应延迟、注意力阈值、操作精度不足等生理局限。
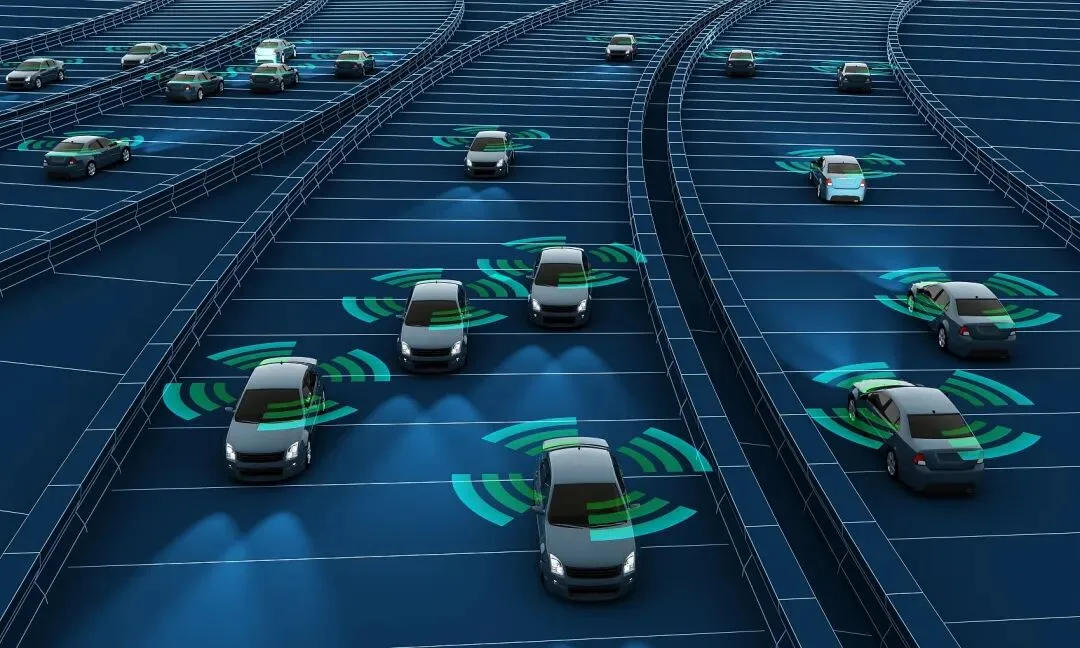
智能驾驶通过全时感知监测、毫秒级响应机制、多维度风险建模、硬件算法双重冗余。当前,量产高阶智驾系统均搭载感知硬件冗余、算力冗余、算法冗余架构,单一传感器故障可通过多源数据融合补全,从技术底层规避单点失效风险,将交通事故的人为诱因概率降至最低,实现行车安全的标准化、量化管控。
2. 效率革新:单机智能到车路协同全局优化
传统道路交通拥堵,核心痛点是人工驾驶行为随机性强、车辆交互无序、路况预判滞后,无法实现路网通行效率最优。
配合V2X车路协同技术,车辆可实时获取路口红绿灯时序、全局交通流数据,提前完成车速适配与路径预判,彻底解决「幽灵堵车」等行业痛点,实现路网通行效率的全局最优调度。
3. 能耗管控:算法驱动的标准化节能控制
传统人工驾驶的急加速、急制动、怠速空转、低速高负荷行驶等不规范操作,是车辆能耗偏高、碳排放超标的核心技术痛点,人工无法实现动力输出的精准最优控制。
智能驾驶系统依托车辆动力学模型+实时能耗优化算法,实现全工况能耗精细化管控:算法可根据车辆载重、路况坡度、行驶速度、电池/发动机工作效率区间,动态优化动力输出策略,匹配最优传动比与行驶姿态,规避低效行驶工况。
4. 行驶品质迭代:高精度线控的动态稳定性优化
车辆驾乘舒适性的核心,取决于车辆运动控制的平顺性与稳定性,传统人工驾驶无法消除操作顿挫、转向偏差、制动突兀等问题。
智能驾驶基于27自由度车辆动力学建模、动态轨迹平滑算法、线控底盘精准调校,可实时补偿路面颠簸、车身侧倾、车速波动带来的行驶偏差:在加速、制动、转向、过弯全场景下,实现动力线性输出、转向角度精准控制、车身姿态动态平衡,彻底消除人工驾驶的操作顿挫与行驶抖动。



 10个月宝宝每天需要喝多少奶粉?
10个月宝宝每天需要喝多少奶粉?
