本文来源:智车科技 深蓝AI大讲堂
自动驾驶正处于技术验证到大规模商业化的拐点,“车路云一体化”将成为中国智能驾驶的特色路径。城市NOA、无人配送等深度落地,车辆面临不再是封闭高速,转向复杂的城区道路、无保护转弯、人车混行。场景复杂度指数级上升,对算法的鲁棒性、实时性、安全性提出了更高要求。
技术路线上,端到端是近两年的主流,特斯拉、华为等智驾车企都在积极推进量产上车。然而,端到端并非万能。其黑盒特性带来的不可解释、安全冗余不足等局限,需要通过模块化设计、安全机制、数据闭环等手段来弥补。
在此背景下,对工程师的要求已然清晰:不仅要“控得稳”,还要“规划得聪明”。行业需要是具备“控制+规划”全栈视野、能独立完成算法选型与落地、熟悉仿真与实车调试闭环的系统型工程师。
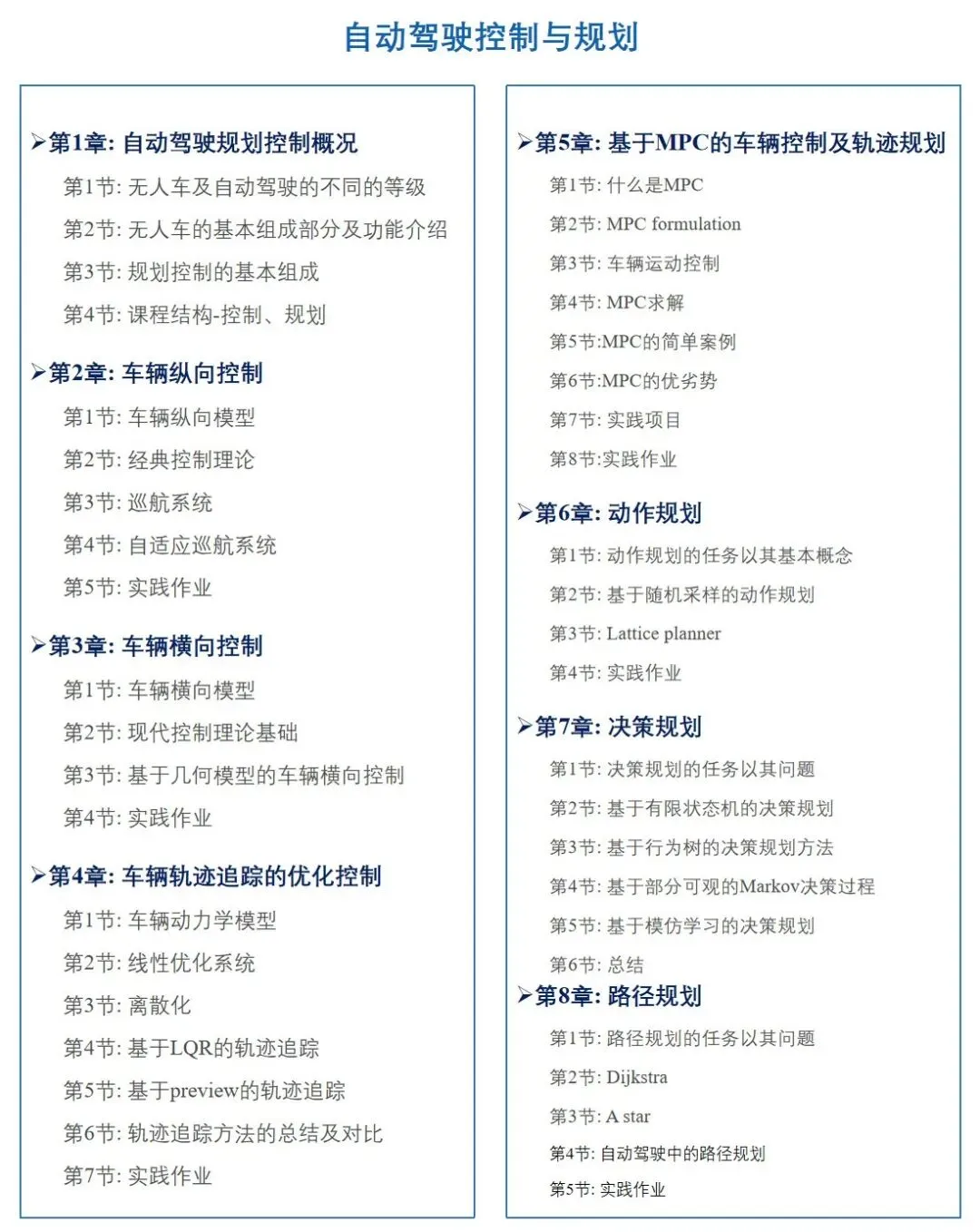
目前工业界广泛应用的规控算法,如控制侧的PID、LQR、MPC,以及规划侧的A*、Dijkstra、有限状态机和Lattice Planner等,网上虽有许多基础介绍,但依然没有系统梳理算法的原理推导以及优劣。为此,深蓝学院、智车科技邀请了具有10年以上规划控制研发经验的乌宁博士,开设了《自动驾驶控制与规划》线上课程。

课程导师
博士毕业于新加坡国立大学。具有10年以上机器人规划控制的研发经验,获得多项自动驾驶专利,并发表多篇机器人、自动驾驶论文。
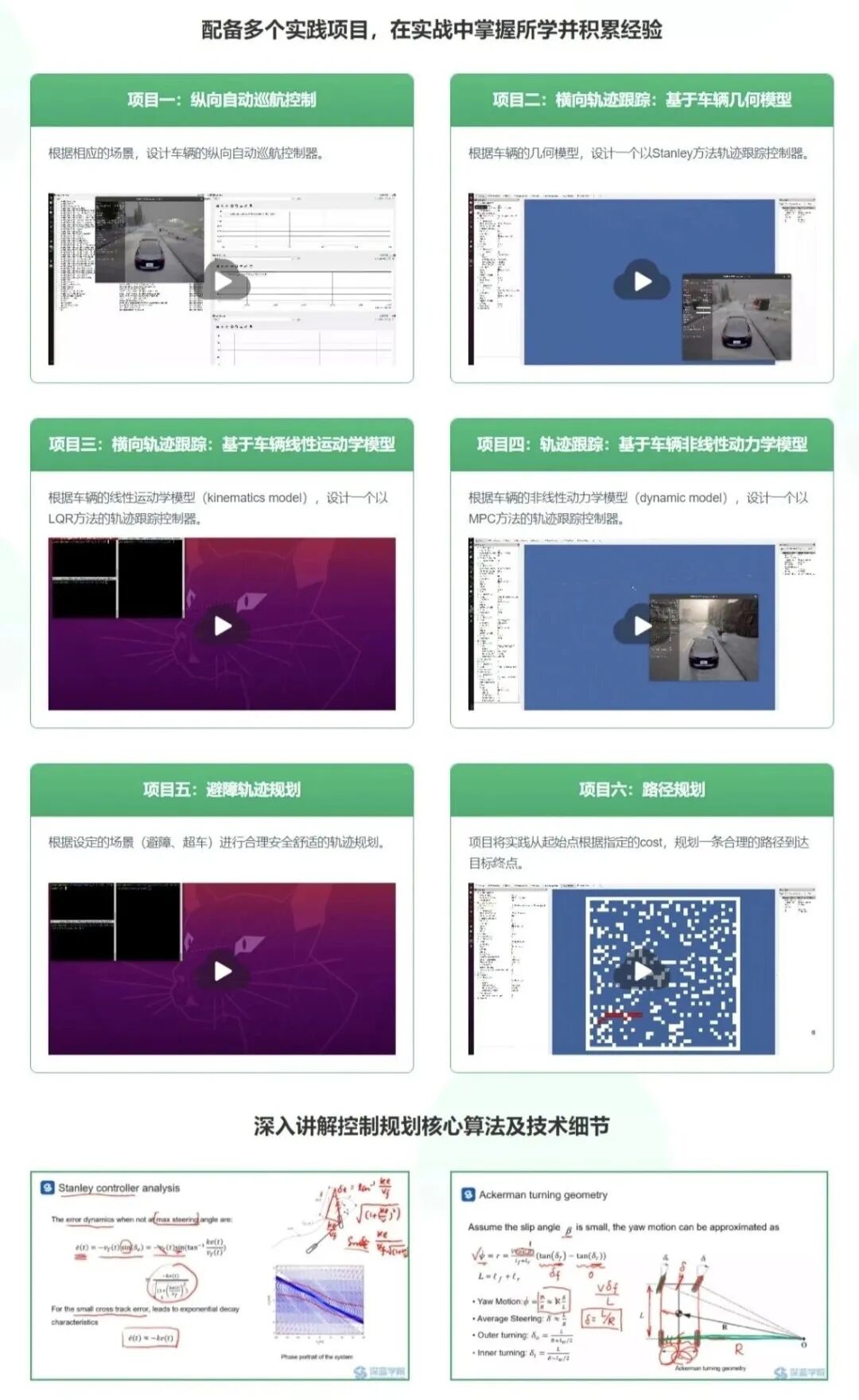
1.了解自动驾驶的规划控制在整个自动驾驶中的作用;
2. 学会如何建立车辆几何模型、车辆运动学模型以及车辆动力学模型,如何对一些重要的参数进行辨识;
3. 学会设计多种控制器(PID, LQR, MPC)去解决自动驾驶中的控制问题,提升车辆的轨迹追踪、自适应巡航等的性能;
4. 学会如何通过有限状态机(Finite-state machine)在动态环境下规划出一条避开障碍物并符合车辆动力学的路径,如何在复杂环境下做出合理决策等;
5. 掌握规划领域的Dijkstra,A*等路径规划的方法,运动规划的方法以及在不确定性条件下的规划问题。本课程从基础的车辆物理模型出发,通过对不同场景及应用下车辆模型的分析,详细阐述车辆控制学及路径规划的知识体系。通过将理论与实际车辆规划控制中的问题相结合,从而让大家达到融会贯通的效果。















 10个月宝宝每天需要喝多少奶粉?
10个月宝宝每天需要喝多少奶粉?
