如需报告请联系客服或扫码获取更多报告(1000份+报告)1 研究背景
1.1 研究对象
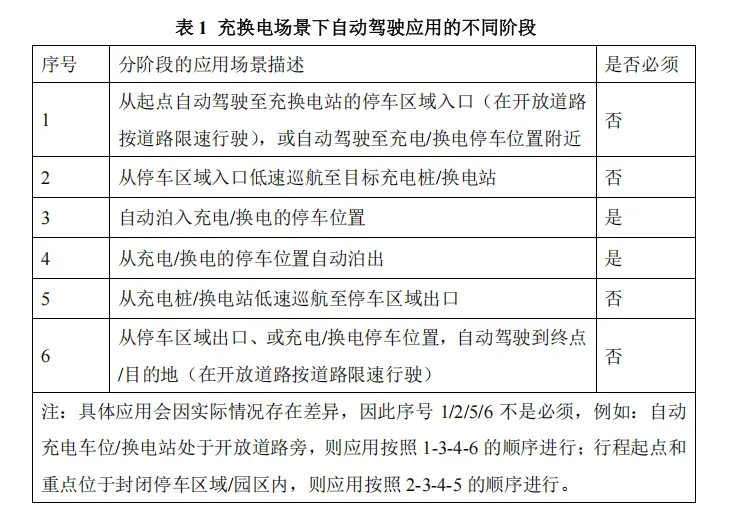
本标准化需求报告(以下简称“本报告”)的研究对象,首先为 具备特定高级别驾驶自动化功能的智能网联汽车,能够在其设计运行 条件下,持续地执行部分或者全部动态驾驶任务,从而确保车辆能够 精准、稳定地停泊于充电站/换电站内设定的目标位置,支撑后续充电 接口的精确对接、动力电池模块的自动化更换作业。驾驶过程中驾驶 员可以在驾驶位作为动态驾驶任务后援用户,也可以不在驾驶位。具 体运行场景包括:
其次,本报告的研究对象还包括:为实现以上场景和功能,场端 基础设施的感知、定位、通信等能力,主要包括但不限于:用于精确 感知车辆位置、车辆姿态、周边环境、周边目标物状态的场端感知与定位系统;用于实现车辆与场端之间实时、可靠、低时延信息交互的 协同通信接口;为确保车辆辅助/自动的泊入及泊出安全,而设立的场 端安全监控、预警、防护装置、紧急停止装置等。注意:场端的感知、 通信等能力,是充换电站自动驾驶系统的一条可选技术路径,不是必 要的组成部分。
特别指出,本报告的标准化需求分析对象不包括具体执行充电口 物理连接、动力电池更换的自动化执行装置,例如充电枪的自动插拔 机械臂、动力电池包的自动拆卸与安装装置等。这些执行机构虽然属 于自动化充电、自动化换电的重要组成部分,但其标准化需求更聚焦 于场端执行装置的机械结构、运动控制及电气连接等方面,与本报告 核心关注的车辆自动驾驶、与场端信息交互和协同控制属于不同领域。
但本报告为获得全面的技术和产业现状,在产业发展现状及典型应用 案例两个章节,仍将调研和分析充电口物理连接、动力电池更换的自 动化执行装置等内容。
1.2 研究必要性
(一)本功能/系统的典型应用场景能够大幅解放用户精力,具 备创新性、实用性和商业价值。例如夜间无人值守的车辆自动充电、 车辆自动换电等场景,目前已有车企推出演示应用,在该场景下车辆 依靠自动驾驶系统,从用户的家用停车位自动巡航前往补能场地,并 自动控制车辆精准对位泊入停车区域,自动完成充电、换电等补能流 程,最后自动巡航返回车主的家用停车位。其优势及意义包括:(1) 用户下单补能后,车辆可根据场端/云端的智能化调度(综合计算各充电站/换电站的距离、实时空闲状态、剩余电量、分时段电价等综合因 素)在合适的时段前往,使充换电基础设施的资源利用率大幅优化;
(2)调整车辆利用用电低谷的夜间进行补能,即让用户通过波谷电 价得到实惠,又能优化社会电力资源分配,实现削峰填谷,同时还能 与光储充一体化、V2G 能量管理等创新模式相结合,为产业开辟新的 增量空间;(3)通过夜间无人换电,用户的个人精力得以从重复性、 低效耗时的流程中释放出来,作为亮点应用解决用户的实际痛点,从 而带动补能产业服务模式的升级,进一步增大新能源车辆的购车比例。 此外,还可以自动充电/自动换电与自动驾驶结合还可以在城市公共 交通、物流运输等领域带来新的商业模式创新。
(二)充换电场景下的自动驾驶应用与通用场景相比存在较大的 特殊性。换电自动泊车通常并不基于最终泊入车位的车位线等标志物 作为地面标识,而是通过换电站预设的订制化视觉标记;车辆可与场 端采用 V2X 直连通信协议交换数据,可实现感知目标信息融合,甚 至由场端实现车辆的轨迹控制;车辆泊入的精度要求高,横向偏差需 小于 5 厘米,以保障换电机构的精准对接;另外换电自动泊车场景还 要求换电基础设施具备极端天气适应性,需采用车规级传感器和工业 级设备确保稳定性,并通过多帧连续验证和生命体入侵检测等手段实 现安全冗余。
(三)技术标准化有助于不同厂商的车辆与充换电基础设施之间 的通用性和普适性。充换电自动驾驶功能当前正处于应用场景逐渐落 地的产业化发展初期,不同企业的技术路线各异,不同车辆与场端的系统兼容性不足,导致设备互操作性差,严重制约了规模化应用与市 场推广。同时自动充换电场景还对高精度定位、设备协同、安全冗余 等提出了额外的要求,亟需通过制定统一技术标准规范,消除技术壁 垒,提升整车企业和充电/换电基础设施企业之间的技术协同,进一步 避免重复研发与资源浪费,为本功能的规模化部署奠定基础,进而推 动新能源汽车补能基础设施的智能化升级。
(四)充电及换电场景与安全密切相关,应当制定标准加强安全 保障。自动充电和换电场景包括狭小空间内人车混行、高压电气环境、 夜间低光照条件等特殊工况,涉及了高精度定位、动态路径规划、多 模态决策控制、车与场端协同感知与交互等复杂的技术环节,精度要 求高、复杂度高且容错率低,单点故障可能引发碰撞、机械损伤或电 气安全事故,威胁人员与设备安全。应当通过标准加强对系统安全设 计架构、风险识别与评估方法、故障诊断与应急响应的规范;在功能 安全层面,研究车辆在狭小空间内精准停靠及位置保持的鲁棒性控制 策略、异常状态下(如定位失效、通信中断)的安全降级与紧急处置 机制;在预期功能安全层面,研究复杂场端环境(如动态障碍物、反 光干扰、恶劣天气影响)的充分识别,以及人车混流区域的安全交互 策略;在网络安全层面,规范车辆与站端之间关键控制指令与状态信 息传输的机密性、完整性与可用性保障。进一步提升系统鲁棒性,确 保自动充电换电流程的安全可靠运行。
1.3 研究可行性
(一)当前自动驾驶技术的持续演进与多层次应用实践,为充换 电站场景自动驾驶标准化研究奠定了坚实技术基础。在驾驶自动化技 术发展进程中,L2 级辅助驾驶功能已在泊车辅助、特定条件行车控 制等场景实现规模化量产应用。该级别系统的广泛部署有效验证了其 在环境感知、部分动态驾驶任务执行等核心环节的技术可靠性,为高 阶自动化系统在限定场景的应用积累了宝贵的工程经验与验证数据。
更为关键的是,L3 级有条件自动驾驶及 L4 级高度自动驾驶技术正处 于从技术验证向规模化示范应用加速过渡阶段。国内部分技术领先企 业已严格遵循国家相关准入管理要求,通过试点准入程序,即将在限 定区域或特定运行设计域(ODD)内开启实际运行。这一重要进展标 志着相关产品的功能完备性、性能稳定性及安全保障能力已通过严格 验证并达到较高成熟水平。上述实践不仅充分证明了核心技术的可用 性与鲁棒性,更在系统安全架构设计、测试评价方法及运行监测机制 等方面,为规模化商业应用构建了通用性技术框架,为充换电站场景 自动驾驶系统的研发与标准化提供了直接参照。
(二)充换电站作为具备封闭或半封闭属性的特定场景,其内在 特征与自动驾驶技术能力展现出高度适配性,显著降低系统实现难度 与风险。相较于开放道路的复杂交通环境,站内车辆行驶路线呈现高 度固定化与可预设化特征,路径规划逻辑明确且环境要素高度可控, 大幅降低了感知、预测及决策的不确定性。车辆运行速度被严格约束 于低速范畴,从根本上保障了操控稳定性与安全响应裕度。此外,大量充换电站部署于夜间车流稀少区域或封闭园区,为自动驾驶提供了 低干扰、高确定性的运行环境。值得关注的是,国内主要车企及研究 机构已完成多轮实车测试,成功验证了车辆自主驶入/驶出、厘米级精 准停泊及设备状态协同等核心环节的技术可行性,实证了该场景落地 的现实路径。
(三)车联网、人工智能等关键使能技术的深度融合,为系统能 力提升与安全保障提供了强有力支撑。车联网(V2X)技术作为车-站 协同的核心纽带,能够构建高可靠、低时延的双向实时数据交互通道, 实现充换电指令、车辆状态(位置、姿态、电池参数)、站内动态目标 (障碍物、设备状态)等关键信息的毫秒级传输与融合,为系统决策 控制提供多维数据基础。通用人工智能(AI)技术的突破性应用,显 著提升了系统对复杂站内要素(如多类型充电设施、反光标识、临时 障碍物、恶劣光照)的精准识别、语义理解及场景重构能力,优化了 海量数据的实时处理效率与高精度轨迹规划鲁棒性,有效增强了系统 应对边缘工况的智能化水平与安全容错能力。高精度定位、边缘计算 及功能安全(FuSa)、预期功能安全(SOTIF)等共性技术的针对性优 化,共同构筑了系统安全运行的技术底座。
综上所述,自动驾驶技术的成熟度提升、充换电站场景的高适配 性优势及支撑技术的协同赋能,共同确证了标准化研究的充分可行性。 系统构建该场景驾驶自动化安全标准及测试评价体系,具备坚实的技 术基础与实践依据。
2 产业发展现状
2.1 驾驶自动化发展现状
(一)组合驾驶辅助功能已在乘用车领域实现规模化深度应用。 L2 级组合驾驶辅助系统渗透率持续攀升并占据很高的市场份额,广 泛覆盖单车道/多车道自适应巡航控制、领航辅助驾驶等核心行车场 景。当前技术发展呈现多维度突破:感知层通过纯视觉、毫米波雷达、 激光雷达等传感器的单一或组合感知融合方式显著提升复杂环境识 别鲁棒性;并将感知与决策过程融合,基于世界模型、VLA(Vision Language-Action,视觉-语言-行为)等端到端模型架构,使辅助驾驶 系统具备更强的日常场景适应能力;执行层依托转向、制动等各类冗 余架构降低系统失效风险。
目前辅助驾驶的功能适用场景已从传统的 结构化道路,延伸至城区无保护左转、环岛通行及施工区域穿行等高 复杂度场景,有效降低人为操作失误导致的碰撞事故发生率,显著提 升行车安全性与驾乘舒适性体验。同时辅助驾驶系统还通过电容感应 方向盘等手部脱离监测,以及疲劳监测、分心监测等眼部脱离监测, 实时监控驾驶员状态,确保其全程参与辅助驾驶系统的动态驾驶任务。
(二)L3 及以上自动驾驶系统进入多场景实证验证阶段。首先 在自动驾驶公开道路测试的政策方面,截至 2024 年 8 月公安部已累 计发放自动驾驶汽车测试号牌 1.6 万张,开放公共测试道路 3.2 万公 里,场景覆盖高速公路、城市快速路和城市道路1。其次在自动驾驶客 运试点运营方面,以北京亦庄为代表的多个示范区内,萝卜快跑、小马智行、文远知行、滴滴等企业已开展全无人驾驶的出租车队运营积 累了上万公里的公告道路测试数据。而对于 L3 及以上自动驾驶系统 的机动车产品准入,2023 年 11 月,工业和信息化部 公安部 住房和 城乡建设部 交通运输部发布《关于开展智能网联汽车准入和上路通 行试点工作的通知》,汽车生产企业、使用主体、车辆运行所在城市 可组成联合体进行申报。最后长安、比亚迪、广汽、上汽、北汽、一 汽、上汽红岩、宇通、蔚来 9 家机动车生产企业牵头分别组建的联合 体,成功入围了首批自动驾驶准入及上路通行试点名单,并在四部委 的指导下积极开展试点产品准入测试与安全评估,通过测试评估后将 获得自动驾驶汽车的产品准入并正式开展上路通行试点。
(三)泊车辅助和自动泊车呈现技术多元化发展格局,代客泊车 技术加速高阶场景落地。基础泊车辅助功能已在绝大多数量产车型上 覆盖。智能泊车辅助(IPA, Intelligent Parking Assist)系统通过多传感 器融合与算法优化,除常规垂直车位、平行车位,还显著提升了倾斜 车位、窄巷道等复杂场景的泊入成功率。遥控泊车辅助(RPA, Remote Parking Assist)等功能支持用户通过手机等移动终端在短距离内控制 车辆泊入泊出及直线移动。部分车企推出记忆泊车功能,通过学习用 户常驻路线实现从进入车库到专属车位的自主通行。基于场端设施的 自动代客泊车(AVP, Automated valet parking)系统在试点停车场投 入应用,通过激光雷达与视觉融合定位实现厘米级精度泊入。欧盟法 规 R(EU)2022/1426 已将 AVP 纳入有条件自动驾驶认证框架,可接受 车辆借助特定停车场基础设施部署的高精度定位与传感器等系统。

 10个月宝宝每天需要喝多少奶粉?
10个月宝宝每天需要喝多少奶粉?
