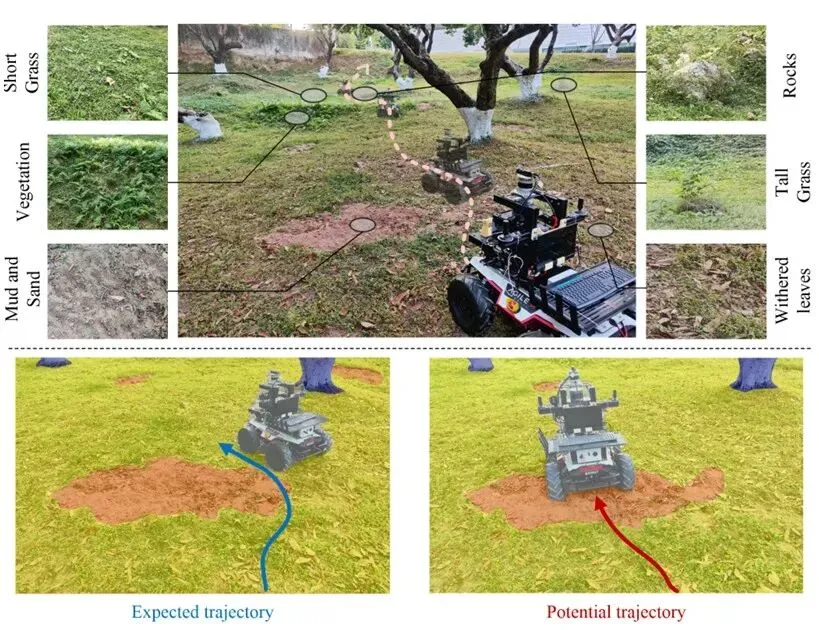
在城市道路自动驾驶中,车辆可以依赖车道线、道路边界、交通信号和高精地图完成感知与规划。但在越野环境中,情况完全不同:道路边界往往不清晰,车辆面对的是草地、泥地、坑洼、碎石、坡地、积水和植被等复杂地形。 这类场景通常被称为 非结构化环境。在这里,自动驾驶系统要解决的核心问题不再是“车道在哪里”,而是:前方这片地面,到底能不能安全通过? 2024年发表在Drones期刊上的论文 Autonomous Vehicles Traversability Mapping Fusing Semantic–Geometric in Off-Road Navigation 正是围绕这一问题展开。论文提出了一种融合 RGB 图像语义信息和3D点云几何信息的越野可通行性建图方法,并将生成的可通行性代价地图用于自动驾驶车辆的安全轨迹规划。
图1 非结构化野外环境中的越野自动驾驶场景SECTION 01一、为什么这篇论文值得关注?
越野自动驾驶的难点在于,车辆不能简单根据“有没有道路”来判断可行驶区域。例如,草地在视觉上可能很平坦,但如果草很高、地面松软或存在泥泞,就可能导致车辆打滑甚至陷车;相反,一些表面看似粗糙的区域,如果坡度和起伏可接受,也可能是可通行区域。 因此,单独依赖视觉语义分割并不可靠。视觉方法可以识别地表类别,但不一定能判断地形起伏、坡度和障碍物高度;单独依赖几何点云也不充分,因为几何方法可以判断坡度和粗糙度,却难以识别泥地、厚草等具有物理风险的地表类型。论文明确指出,外观信息和几何信息各有局限,因此需要将二者融合起来进行地形可通行性评估。 这也是这篇论文的核心价值:不是只看“这是什么地面”,也不是只看“地面高低起伏”,而是同时理解地表语义和空间几何。
SECTION 02二、核心思想:把“看得懂地形”和“走得过去”连接起来
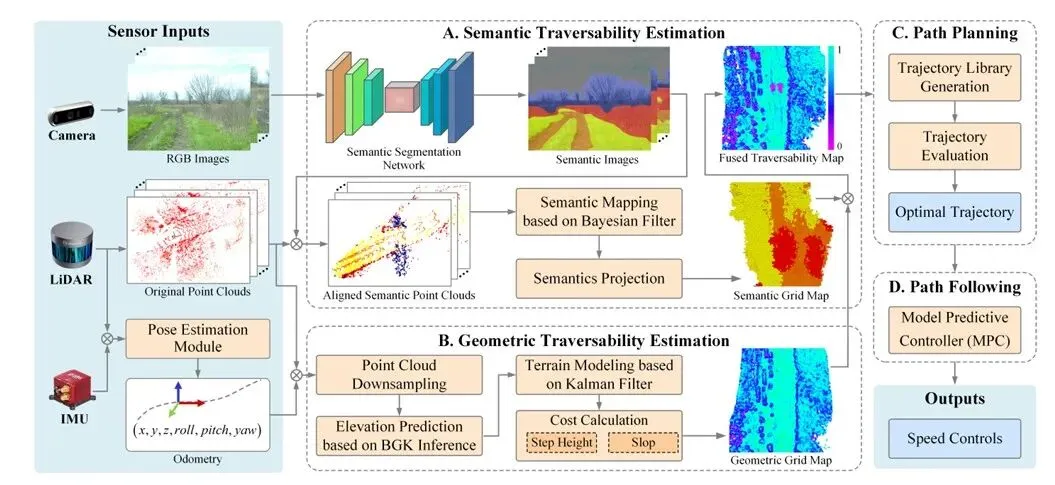
该论文核心思想为:利用 RGB 图像理解地表语义,利用 3D 点云理解地形几何,再融合生成可通行性代价地图,最终服务于越野路径规划。 具体来说,论文首先从 RGB 图像中提取语义信息,例如道路、草地、砂地、石块、障碍物等;然后从 3D 点云中构建局部高程地图,提取坡度、粗糙度和高程变化等几何特征;最后将语义代价和几何代价融合,形成一张能够反映地形通行风险的 cost map,即可通行性代价地图。该代价地图进一步与扩展运动基元规划器结合,用于生成安全轨迹。
图2 自动驾驶越野导航整体框架SECTION 03三、语义建图:让车辆知道“这是什么地面”
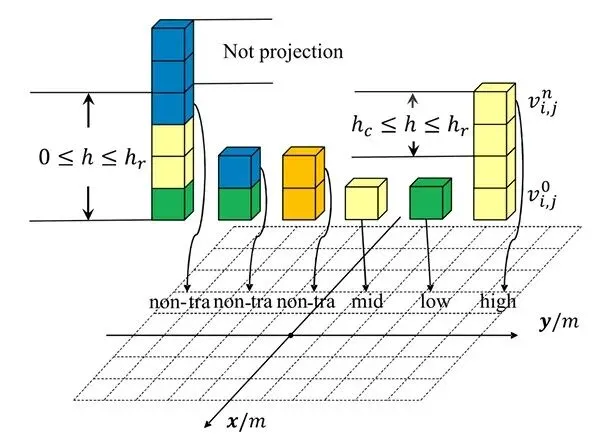
在越野环境中,不同地表类型对应不同的通行风险。比如,沥青和混凝土地面通常比较容易通行;草地和砂地可能存在一定风险;岩石、深坑或障碍物则可能不可通行。 论文使用语义分割网络对 RGB 图像进行地表类别识别,并进一步将不同语义类别映射为不同的通行代价。与普通语义分割不同,这里的目标不是单纯完成“图像分类”,而是把语义结果转化为可供规划使用的地形代价。论文中给出:绿色表示容易通行区域,黄色表示草地和砂地等粗糙表面,橙色表示岩石,蓝色表示障碍物。
图3 语义代价投影示意图SECTION 04四、几何建图:让车辆知道“地面是否平稳”
仅靠语义信息仍然不够。比如,一片草地在图像上可能被识别为“可通行”,但如果地面存在明显坑洼或陡坡,车辆仍可能发生剧烈颠簸、打滑甚至失稳。 因此,论文引入 3D 点云构建局部高程地图,并从高程地图中提取几何特征。由于原始点云通常较稀疏,论文采用 Bayesian Generalized Kernel,BGK,贝叶斯广义核推理 来估计未知栅格属性;同时使用卡尔曼滤波融合多帧信息,以实时生成更加稠密、稳定的局部高程地图。 这一步的作用为:语义告诉车辆“这是什么地面”,几何告诉车辆“这个地面是否足够平、足够稳”。
SECTION 05五、语义—几何融合:真正判断“能不能走”
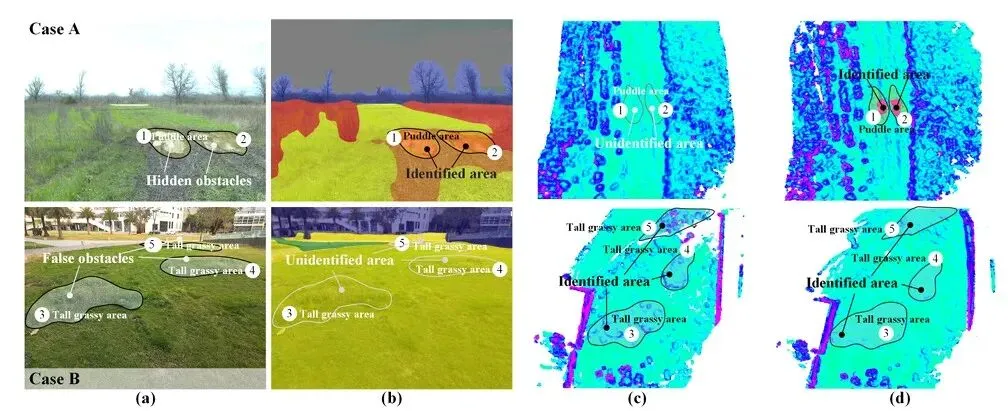
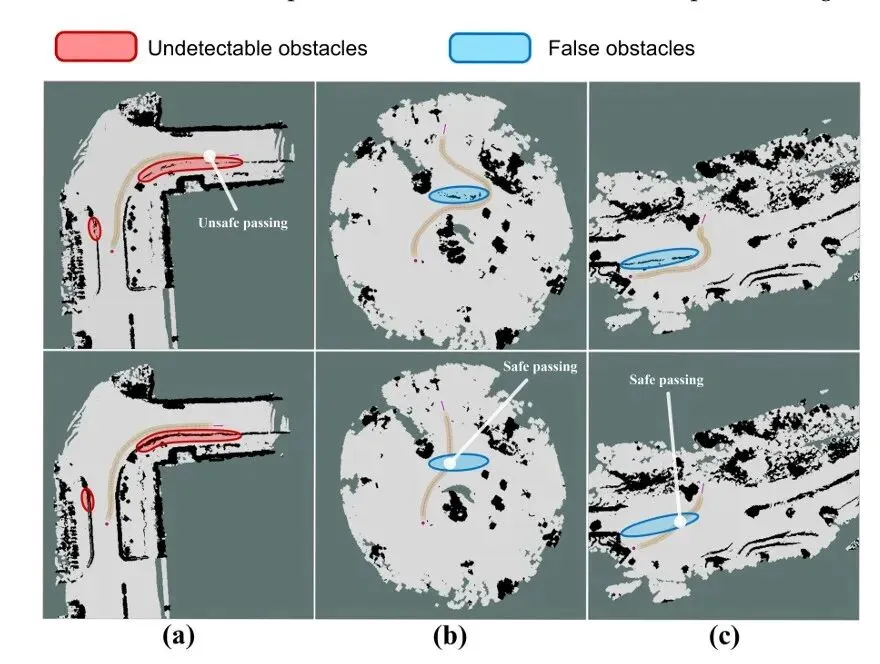
论文最关键的部分,是将语义信息和几何信息融合为统一的可通行性地图。 如果只依赖几何信息,系统可能无法识别泥地、厚草等“看起来平但容易陷车”的区域;如果只依赖语义信息,系统又可能无法准确判断坑洼、坡度突变和高程变化带来的风险。论文的融合方法正是为了弥补这两类方法的不足。 在融合之后,每个栅格不仅有地表类别信息,也有坡度、粗糙度和高程变化等几何信息。车辆规划轨迹时,不再只避开障碍物,而是倾向于选择整体代价更低、更平稳、更安全的区域。
图4 语义—几何融合后的可通行性评估结果SECTION 06六、从地图到轨迹:可通行性代价如何服务规划?
生成可通行性地图只是第一步,最终目标仍然是让自动驾驶车辆在越野环境中安全行驶。论文将融合后的 cost map 输入到扩展运动基元规划器中,用于规划最优轨迹。这里的“最优”不仅意味着路径短,还意味着路径要满足车辆运动约束,并尽可能避开高风险地形。论文指出,该方法同时考虑了不同地表的通行代价和碰撞风险,能够生成动态可行且无碰撞的轨迹。 通俗地说,这套方法不是简单地告诉车辆“左边能走、右边不能走”,而是给每个区域分配一个通行代价,让规划器在安全性、平顺性和效率之间做综合选择。
SECTION 07七、实验结果:成功率提高,轨迹更平滑
论文在真实 UGV 平台和越野场景中进行了实验验证。结果显示,相比已有较成熟的户外导航算法,论文方法使自动驾驶车辆的导航成功率提高了 4.4% 到 13.6%,轨迹粗糙度降低了 5.1% 到 35.8%;同时,在导航过程中,车辆对地形表面的选择准确率保持在 85% 以上。 可以这样理解这些结果:成功率提高,说明车辆更不容易陷入不可通行区域或规划失败;轨迹粗糙度降低,说明车辆选择的路径更加平顺;地形选择准确率超过85%,说明系统对“哪种地形更适合通行”的判断具有较高可靠性。
图5 不同方法在导航成功率和轨迹粗糙度上的对比SECTION 08八、实验结果:语义—几何融合让越野导航更稳、更准
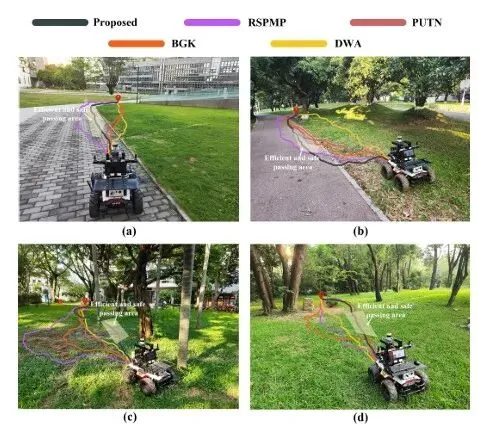
为了验证方法有效性,论文在四类非结构化越野场景中进行了导航实验,并将本文方法与 DWA、BGK、PUTN 和 RSPMP 等已有方法进行对比。实验评价不仅关注车辆是否能够到达目标点,还进一步考察轨迹是否平顺、路径是否合理、车辆是否倾向选择低风险地形区域。 图中黑色轨迹为本文方法,蓝色为 RSPMP,红色为 PUTN,橙色为 BGK,黄色为 DWA。可以看到,本文方法在多个场景中更倾向于选择平滑、低代价的地表区域,避免车辆陷入泥地、高草或狭窄高风险区域。 从定性结果看,DWA 和 BGK 等几何方法容易受到草地高度或泥泞区域影响。例如,在高草场景中,几何方法可能将可通行区域误判为障碍;在泥地场景中,又可能因为缺少语义理解而选择容易打滑的区域。相比之下,本文方法同时考虑语义信息和几何信息,因此能够更准确地区分“看起来可通行但存在风险”和“看起来复杂但实际可通行”的地形。
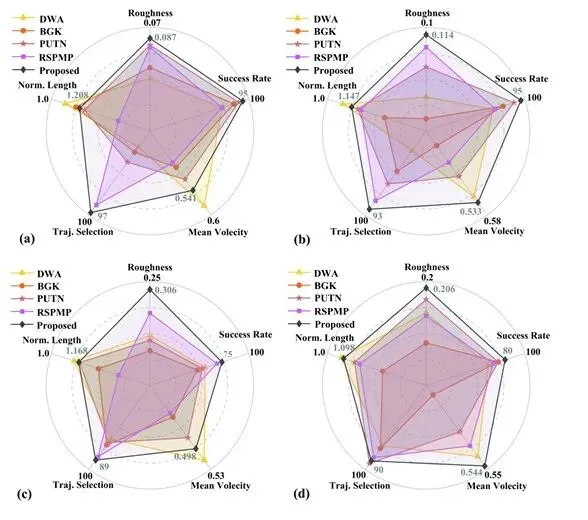
图6 不同方法在四类非结构化场景中的车辆导航轨迹对比图7 不同方法在四类场景中的导航性能定量对比图7展示了不同方法在成功率、轨迹粗糙度、归一化轨迹长度、轨迹选择准确率和平均速度等指标上的表现。论文指出,本文方法在所有测试场景中均取得最高成功率,并使车辆轨迹粗糙度降低 5.1% 至 35.8%。从定量结果看,本文方法在四个场景中的成功率分别达到 95%、95%、75% 和 80%,均高于或不低于其他对比方法;轨迹粗糙度分别为 0.087、0.114、0.306 和 0.206,整体低于 DWA、BGK、PUTN 和 RSPMP;地形选择准确率分别达到 97%、93%、89% 和 90%,说明车辆能够较稳定地选择更适合通行的地表区域。
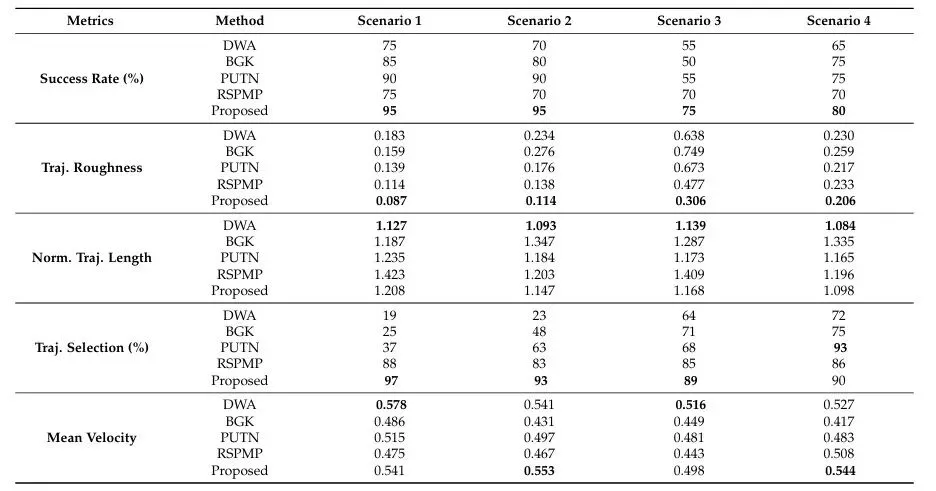
表1给出了成功率、轨迹粗糙度、归一化轨迹长度、轨迹选择准确率和平均速度等完整实验数据。其中,本文方法在成功率和轨迹选择准确率上表现最突出,说明语义—几何融合不仅提高了车辆到达目标的概率,也使车辆更倾向于选择低风险、平顺、可通行的地形区域。总体来看,实验结果证明:语义—几何融合不是简单叠加两类信息,而是能够切实改善越野自动驾驶车辆的导航质量。语义信息帮助车辆理解地表类型,几何信息帮助车辆判断坡度、粗糙度和高程变化,二者结合后,车辆才能更可靠地判断“哪里能走、哪里更适合走”。
表1 不同方法在四类场景中的导航性能对比SECTION 09九、对越野机器人研究的启发
对于越野自动驾驶和移动机器人来说,这篇论文的启发在于:非结构化环境下的“可通行性”不是一个单一感知问题,而是语义、几何和车辆运动能力共同作用的结果。 在城市道路中,车辆可以依赖规则化道路结构;但在越野环境中,系统必须具备更强的地形理解能力。论文的方法说明,未来越野自动驾驶不应只追求更准确的语义分割,也不应只构建更精细的点云地图,而应将地表类别、坡度、粗糙度、障碍物和车辆动力学约束统一到可通行性评估框架中。 这对自动驾驶测试场景构建也有启发意义:越野场景中的“高价值场景”并不一定只来自碰撞风险,还可能来自地形复杂度、语义不确定性、几何突变和规划困难度。例如,厚草遮挡坑洼、泥地导致打滑、碎石导致轨迹颠簸,这些都可以作为非结构化环境下的重要测试场景。
SECTION 10十、总结
论文指出,当前方法在更大规模、更复杂环境中的应用仍面临计算和存储成本问题。未来研究需要设计更加高效的数据结构,用于统一表达大范围复杂地形。同时,作者认为后续可以进一步结合深度学习和贝叶斯方法,更可靠地估计语义预测的不确定性,并将这种不确定性纳入地图构建过程。也就是说,这篇论文虽然已经实现了语义—几何融合的越野可通行性建图,但如何在大范围场景中更高效、更稳定地运行,仍然是后续值得研究的问题。 总的来说,这篇论文让越野自动驾驶车辆不再只是“看见地面”,而是进一步理解“这类地面能不能走、走起来是否平稳、是否适合规划轨迹”。它的核心贡献在于:将 RGB 语义理解、3D 点云几何建图和轨迹规划连接起来,形成了一套面向非结构化越野环境的可通行性评估与导航框架。
✨ 持续关注,我们将带来更多自动驾驶与机器人前沿论文解读
✨欢迎对越野机器人感兴趣的同行加微信交流:15711463195