GNSS + 自动驾驶:RTK 已经 Fix 了,为什么车端还是不敢信?
- 2026-06-19 22:16:29
GNSS + 自动驾驶:RTK 已经 Fix 了,为什么车端还是不敢信?


★📌 本文位置:GNSS观察 · G30 · 自动驾驶定位完整性 · RTK Fixed 之后的可信边界
关于无线 Battlecard
这里记录无线通信、卫星通信、GNSS、WiFi、5G-A 与测试验证中的工程判断。
如果你希望系统阅读,可从文末合集入口进入;也欢迎关注并星标,方便持续看到后续文章。
开场
车端定位团队最容易被一个字段误导:RTK Fixed。
这个字段看起来很硬。Fixed,好像问题已经解决;厘米级,好像已经能进车道级;差分链路正常,好像定位系统已经可以交给规划控制使用。但自动驾驶系统真正害怕的场景,是RTK 已经 Fix 了,却 Fix 在一个错误解上,而且系统没有及时意识到它错了。
这个问题不是纸面假设。u-blox 在公开的 ZED-X20P high precision GNSS module(来源:https://www.u-blox.com/en/product/zed-x20p-module) 页面里,把 all-band high precision GNSS、RTK/PPP-RTK、ADAS/Autonomous driving、jamming detection、Galileo OSNMA、secure boot/updates 放在同一个产品叙事里。这个组合很有代表性:汽车定位已经不再只问“能不能厘米级”,而是在问厘米级结果是否可信、是否抗欺骗、是否能被车端安全状态机接收。
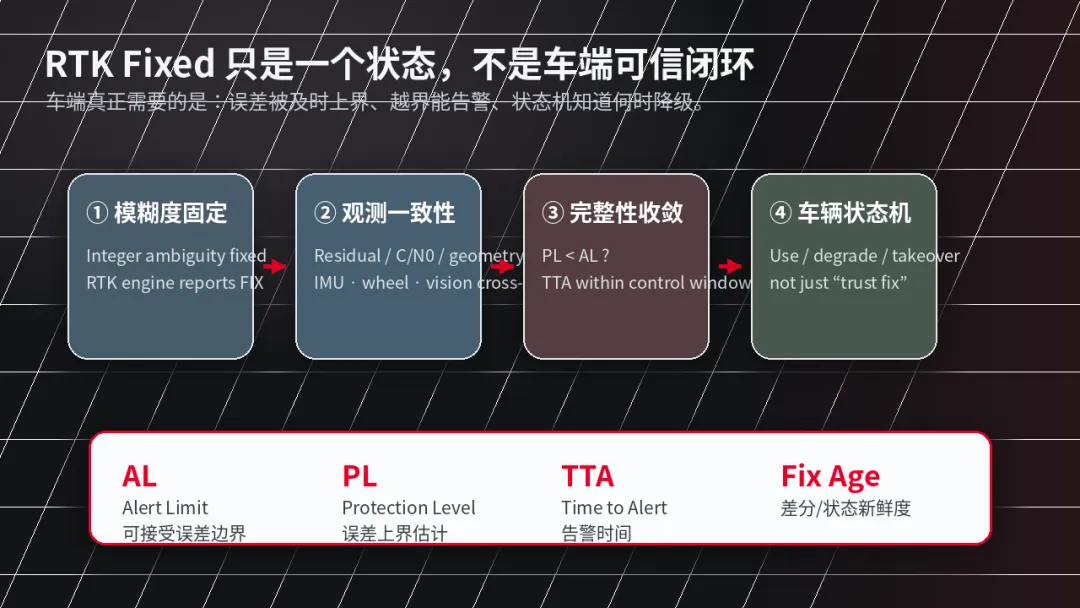
ESA Navipedia 对 Integrity(来源:https://gssc.esa.int/navipedia/index.php/Integrity) 的定义更直接:完整性关注对导航信息正确性的信任,以及系统不应使用时能否及时告警;它比单纯精度更接近车端安全语言。这里面有三个关键词:Protection Level(PL)、Alert Limit(AL)、Time to Alert(TTA)。这三个词,才是自动驾驶车端敢不敢信 RTK Fixed 的关键。
客户对话锚点
核心判断很简单:客户说 RTK Fixed,只说明模糊度固定成功;要判断能不能给车控用,必须继续追问完整性边界。
车端看到 Fixed 后,会直接提高 GNSS 权重,还是先检查 PL < AL? 错误 Fix 持续 0.2 s、1 s、3 s 时,车辆状态机会如何降级? 城市峡谷、多路径、差分延迟、遮挡重捕获下的错误 Fixed,能否在台架里稳定复现?
这类对话的落点,是把 RTK 从一个状态字段,翻译成车端可验证的可信边界。
一、Fixed 到底 Fix 了什么
RTK Fixed 里的 Fixed,主要指载波相位模糊度被固定到整数解。ESA Navipedia 的 Carrier Phase Ambiguity Fixing(来源:https://gssc.esa.int/navipedia/index.php/Carrier_Phase_Ambiguity_Fixing) 页面解释过,载波相位观测比码伪距精得多,通常可达到比码观测高两个数量级的精度;模糊度固定后,载波相位可以像高精度伪距一样参与定位。
所以 Fixed 很重要。没有它,很多厘米级定位做不出来。
但这句话反过来不成立:Fixed 很重要,不等于 Fixed 之后的位置就一定可信。
原因在于,模糊度固定解决的是“算法找到一个整数解”的问题;车端安全系统关心的是另一个问题:这个解如果错了,错多大、错多久、系统什么时候知道它错了。
这就是 false fix 的危险之处。它比“没有定位”更麻烦:定位系统会自信地给出一个错误答案。在自动驾驶里,后者比前者更难处理。没有定位,系统可以降级;错误定位如果伪装成 Fixed,融合系统可能会继续提高 GNSS 权重,把错误喂给定位融合、轨迹预测和横纵向控制。
二、车端真正害怕的是错误持续时间
讨论 RTK false fix 时,很多人习惯问“误差有几米”。这个问题只问了一半。
车端更该问的是:错误持续了多久?在这段时间里,车走了多远?状态机有没有来得及降级?
一个简单计算就够说明问题:
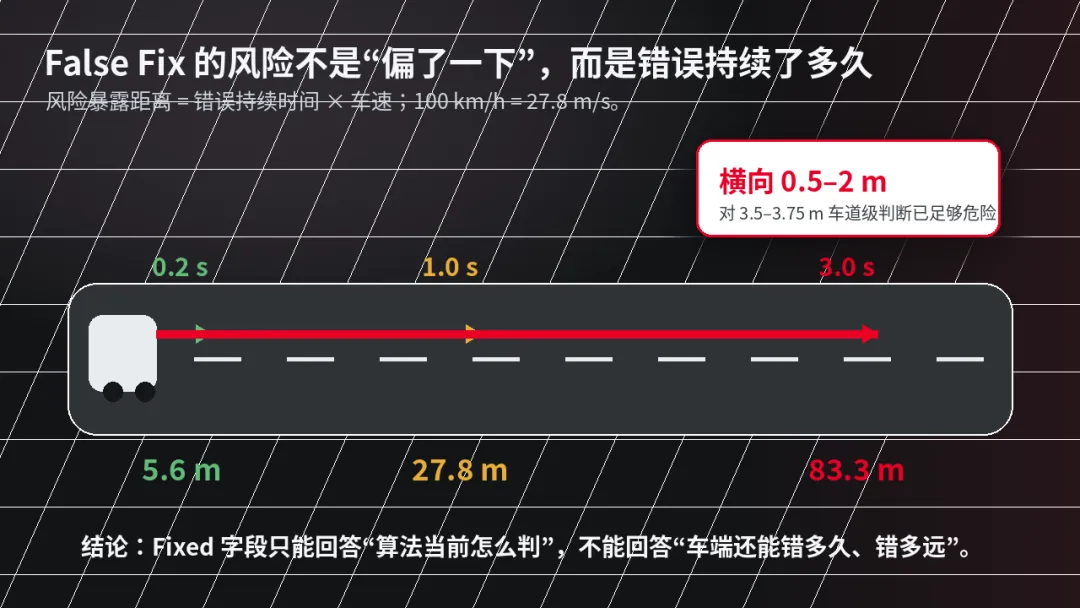
这个表并不表示 GNSS 误差会直接变成车辆位移误差,它提醒的是另一个工程事实:错误状态持续时间本身就是风险暴露量。
在高速或高架场景,0.2 s 听起来很短,但 100 km/h 下已经对应 5.6 m 的车辆前进距离。到了 1 s,就是 27.8 m。如果错误 Fix 持续 3 s,风险暴露距离达到 83.3 m,这已经不是“瞬间跳点”,而是一个连续错误状态。
横向也一样。典型道路车道宽度可以按 3.5–3.75 m 量级理解。对车道级定位来说,0.5–2 m 的横向 false fix 已经足够危险:它可能不一定让车辆立刻压线,但足以改变车道归属判断、车道中心线偏差估计、旁车关系和变道决策。
三、完整性为什么比平均精度更接近车端语言
很多定位汇报喜欢写平均精度、CEP、RMS,或者“开阔天空厘米级”。这些指标有价值,但它们不是自动驾驶最关心的全部。
自动驾驶要问的是:在当前场景下,误差有没有被上界住?如果不能保证,系统多久能告警?
ESA Navipedia 的 Integrity(来源:https://gssc.esa.int/navipedia/index.php/Integrity) 把完整性相关参数拆成几类:Alert Limit、Time to Alert、Integrity Risk、Protection Level。用车端语言翻译一下:
所以,车端不应该只看 fixType = RTK_FIXED,更应该看:PL 是否小于 AL、TTA 是否短于状态机决策窗口、完整性风险是否符合当前功能等级。
举个工程口径:如果某个车道级功能把横向 AL 设在 1.5–2.0 m,那么只有当当前横向 PL < AL,且告警时间 TTA 小于车辆状态机可接受窗口时,这个 GNSS 结果才适合进入高权重融合。否则,即使 RTK Fixed,也只能作为带风险标签的观测源,而不是车端真值。
RAIM 的思路也类似。Navipedia 的 RAIM Fundamentals(来源:https://gssc.esa.int/navipedia/index.php/RAIM_Fundamentals) 强调,保护水平会受到测量噪声、卫星几何、误警概率、漏检概率等因素影响。换句话说,同样是 Fixed,开阔天空和城市峡谷不是同一个风险状态;同样是厘米级输出,卫星几何和多路径环境变了,可信边界也会变。
四、落地路径:不要把 Fixed 当真值源,要把 GNSS 当观测源
工程上更稳的做法,是把 GNSS 当成一个带置信边界的观测源,而不是“Fixed 就可信”的真值源。
第一步,车端融合必须把 RTK 状态、差分龄期、卫星几何、残差、C/N0、周跳、多路径指标、IMU/轮速/视觉/LiDAR 一致性一起看。一个常见危险模式是:RTK 状态显示 Fixed,但 IMU 推算轨迹、轮速里程、视觉车道线、地图匹配残差已经开始不一致。如果融合系统还继续提高 GNSS 权重,false fix 会被“融合得更像真的”。
第二步,测试必须从路测偶发,转向可复现场景。城市峡谷、多路径反射、遮挡后重捕获、差分链路延迟、基站距离变化、低仰角卫星比例上升,这些都应该做成可重复的测试条件。GSS9000/GSS7000 一类 GNSS 场景仿真平台的价值,就在于把“路上偶然出现的一次错误 Fix”,转换成台架里可注入、可回放、可比较的场景。
第三步,验收指标要从“多久 Fix”升级到“错误 Fix 如何被识别”。RTK 首次 Fix 时间当然重要,ESA Navipedia 的 Real Time Kinematics(来源:https://gssc.esa.int/navipedia/index.php/Real_Time_Kinematics) 也说明 RTK 依赖载波观测和基准站/流动站差分链路,典型基准服务范围可按 10–20 km 量级理解。但对自动驾驶来说,Fix 时间只是入口指标;更关键的是 false fix rate、错误持续时间分布、PL/AL 越界率、告警延迟、降级策略触发是否稳定。
第四步,记录要足够细。只保存定位结果不够,至少要保留原始观测、卫星状态、差分数据龄期、融合前后残差、状态机切换时间戳。否则出了问题,只能看到“当时是 Fixed”,却不知道为什么 Fixed、错在哪里、有没有被其它传感器提醒。
行动卡
工程判断
RTK Fixed 是必要条件,不是充分条件。 它回答的是载波相位模糊度有没有被固定;自动驾驶还要回答完整性有没有收敛、错误有没有被上界、告警有没有赶上车端决策。
把这件事想清楚后,测试目标会变得很明确:不要只证明“我能 Fix”,还要证明“我错的时候,系统知道自己错了,并且来得及降级”。
这才是 GNSS 从高精度定位走向自动驾驶可信定位的分水岭。
上一篇:G29 · GNSS + 低轨PNT:信号更强以后,定位测试反而更难了 下一篇:G31 · GNSS + 自动驾驶:地库出来那几秒,为什么最容易丢掉车道级定位?(尚未发布)
系列合集
本文为个人技术分享,不代表任何雇主立场。文中涉及的产品/方案名称均为业内公开信息。
随机文章
-
 10个月宝宝每天需要喝多少奶粉?
10个月宝宝每天需要喝多少奶粉?
- 纯油车两吨多SUV 2.0T油耗干到5.8l/百公里
- 谁说豪华混动高不可攀?这款SUV降到25.88万,油耗才5个多,家用真绝了
- 5万二手SUV:途观Lvs宝马X1,谁是冤种?
- 零百2.84秒!这台纯电轿车让我当场改变了换车计划
- 2027款宝马X3先别急着上头,豪华SUV买家更该看清这些取舍
- 全新轿跑SUV 纯电续航249km/241km 小鹏MONA L03增程版续航信息
- 全尺寸SUV系列,真正懂车的反倒先看用途
- 小鹏 MONA L03,15万级suv年轻人应该关注这些点
- 10万内买中型SUV,续航1845km,油耗0.43L,到底值不值?
- 20万内SUV新标杆?昊铂S600上市权益价17.99万起,四款配置这样选!
