导读: 非结构化越野环境(Off-Road)一直是机器人与自动驾驶领域的“硬骨头”。而当越野遇上冬季的冰雪、冻土和泥泞,传统的几何感知算法彻底失效。2026年,机器人领域顶级期刊 Journal of Field Robotics (JFR) 发表了吉林大学与清华大学团队的最新研究成果。本文将为您深度拆解该论文如何通过变分贝叶斯网络(VBN)+ LSTM 混合模型打破传统局限,并将动态车速预测融入改进的 Hybrid A* 算法,实现极限环境下的安全导航。
SECTION 01一、 引言:越野自动驾驶的“冬季噩梦”与传统算法的断层
在军事行动、应急救援、行星探测等关键任务中,越野自主导航(Off-Road Autonomous Navigation)扮演着不可替代的角色。然而,在野外非结构化环境中,没有高精地图,没有车道线,地形材质极度异构。 特别是在冬季,环境的复杂性呈指数级上升。积雪、暗冰、冻土、草地交织,给车辆带来了四大致命失效模式(Critical Failure Modes):
滑移(Slipping):冰雪导致轮胎与地面摩擦系数 骤降,车辆轨迹失控。
翻车(Rollover):地形崎岖或侧滑导致车辆超出横滚角/俯仰角极限。
下陷(Sinking):软雪或松软泥土承载力不足,导致底盘托底、车轮打滑。
碰撞(Collision):障碍物(如被雪覆盖的岩石、灌木)导致硬件损坏。
传统算法的“盲区”
现有的越野可通行性(Traversability)评估系统大多属于“静态几何派”。它们利用激光雷达(LiDAR)和深度相机,通过计算坡度、粗糙度或进行语义分割来判断“哪里能走”。 但是,它们忽略了一个最核心的变量——车速(Vehicle Speed)。 在冰雪路面上,2km/h 慢速通过可能很安全,但 20km/h 就会瞬间侧滑翻车;相反,在面对陡坡或松软雪地时,保持一定的初始速度利用动能冲坡,反而是最安全的策略。脱离了车辆动态状态(车速)的通行性评估,在冬季越野中无异于盲人摸象。
SECTION 02二、 系统全局框架:数据驱动与物理力学的完美结合
为了打破这一僵局,本文提出了一个集成的风险感知导航框架。该框架不单单依赖纯数据驱动的深度学习,而是将物理力学先验知识融入到了网络结构中。
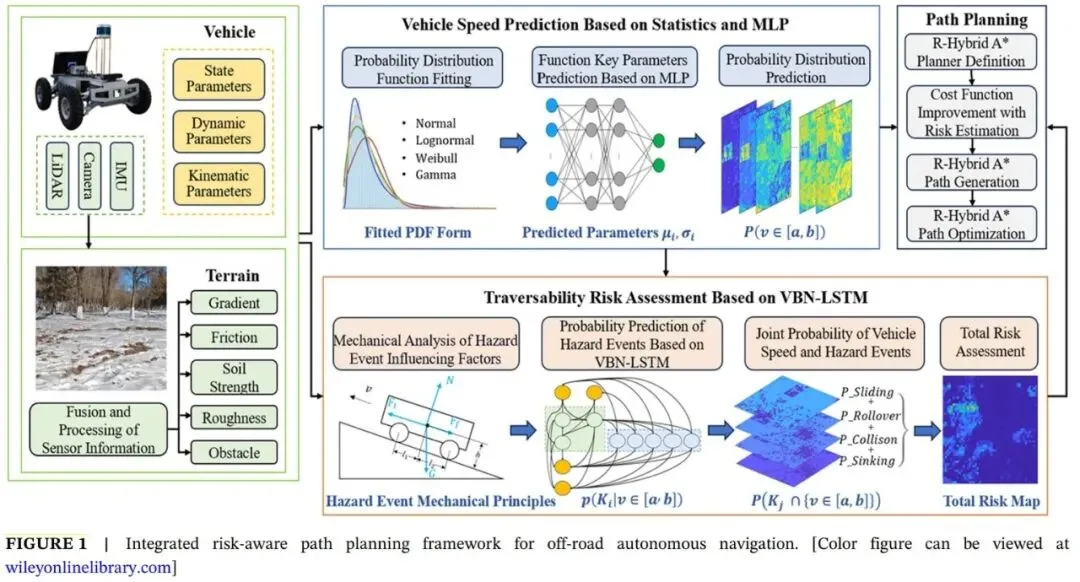
Figure 1 系统全局框架图整个系统由三个核心技术层级组成:
输入层(特征级融合):
地形因素(Terrain Factors):摩擦系数、土壤强度、坡度角、表面粗糙度、植被密度。
车辆因素(Vehicle Factors):车辆负载、轮胎气压、历史轨迹。
核心评估层(双引擎驱动):
MLP车速预测模型:在线预测不同地形下的车速概率分布(对数正态分布参数)。
VBN-LSTM 风险评估模型:融合时序特征与力学因果图,迭代生成全局联合风险地图(Total Risk Map)。
执行控制层(多目标规划):
R-Hybrid A* 算法:将风险图和速度分布作为动态约束,重构代价函数进行路径搜索。
SECTION 03三、 核心方法论深度拆解:它是如何精准控速与算网评估的?
这是整篇论文技术含金量最高、也是最吸引硬核技术读者的部分。
1. 速度分布预测:基于 MLP 的对数正态分布参数拟合
🔍 深度揭秘:为什么是“对数正态分布”?
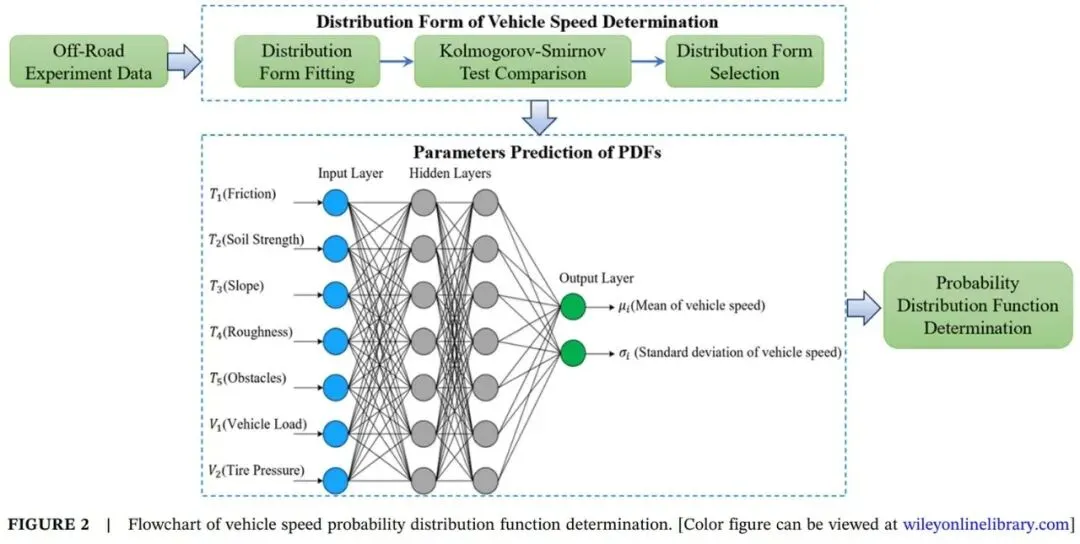
团队在论文中利用最大化似然估计(Maximum Likelihood Estimation)对自然驾驶数据进行了拟合,并通过 Kolmogorov-Smirnov (K-S) 检验(一种测量经验分布与理论分布最大垂直距离的非参数检验)对正态、对数正态、Weibull、Gamma四种分布进行了严格的拟合优度对比。实验结果表明,对数正态分布的K-S统计量最小,其非对称的长尾特征完美符合了车辆在复杂越野地形中“普遍受限、偶尔加速”的实际速度规律。 在预测网络结构上,团队设计了一个极其精巧的多层感知机(MLP):
输入层(7个神经元):包含5大环境特征 (摩擦系数、土壤强度、坡度角、表面粗糙度、障碍物密度)以及2大车辆状态 (车辆负载、轮胎气压)。
隐藏层:采用 2 层隐藏层,每层固定为 7 个神经元,激活函数全部采用 ReLU,以保证在线计算的实时性。
输出层(2个神经元):直接输出对数正态分布的均值 和标准差 。
Figure 2 速度分布预测与MLP参数拟合流程图其物理意义在于:这使得规划器不仅知道“平均车速是多少”,还能知道“车速波动的风险有多大”,从而为后续的路径规划提供精确的时间代价(Time Cost)依据。
2. VBN-LSTM 风险评估:当因果图遇上时序特征
传统的贝叶斯网络(BN)虽然能处理因果关系,但无法处理自动驾驶这种强时序关联的数据;而纯 LSTM 虽能处理时序,却是个黑盒,缺乏物理力学的可解释性。论文创新性地将两者结合。
⚙️ 力学退化分析:危险是如何发生的?
传统的纯AI算法经常因为“黑盒”特性被学术界诟病。本论文的高明之处在于,它首先通过地面力学(Terramechanics)推导出了四大危险事件与车辆动态状态之间的强因果律约束:
- 侧滑失效约束(Slipping):当车辆在坡道(坡度为)上行驶或转向(半径为)时,轮胎所受的驱动力或侧向力不能超过地面最大附着力:
(其中 为电机转矩, 为传动比, 为传动效率, 为车轮有效半径, 为地形摩擦系数)。
- 倾翻失效约束(Rollover):侧向倾翻和纵向倾翻的临界状态受质心高度 、轴距 、轮距 以及车速 共同决定:
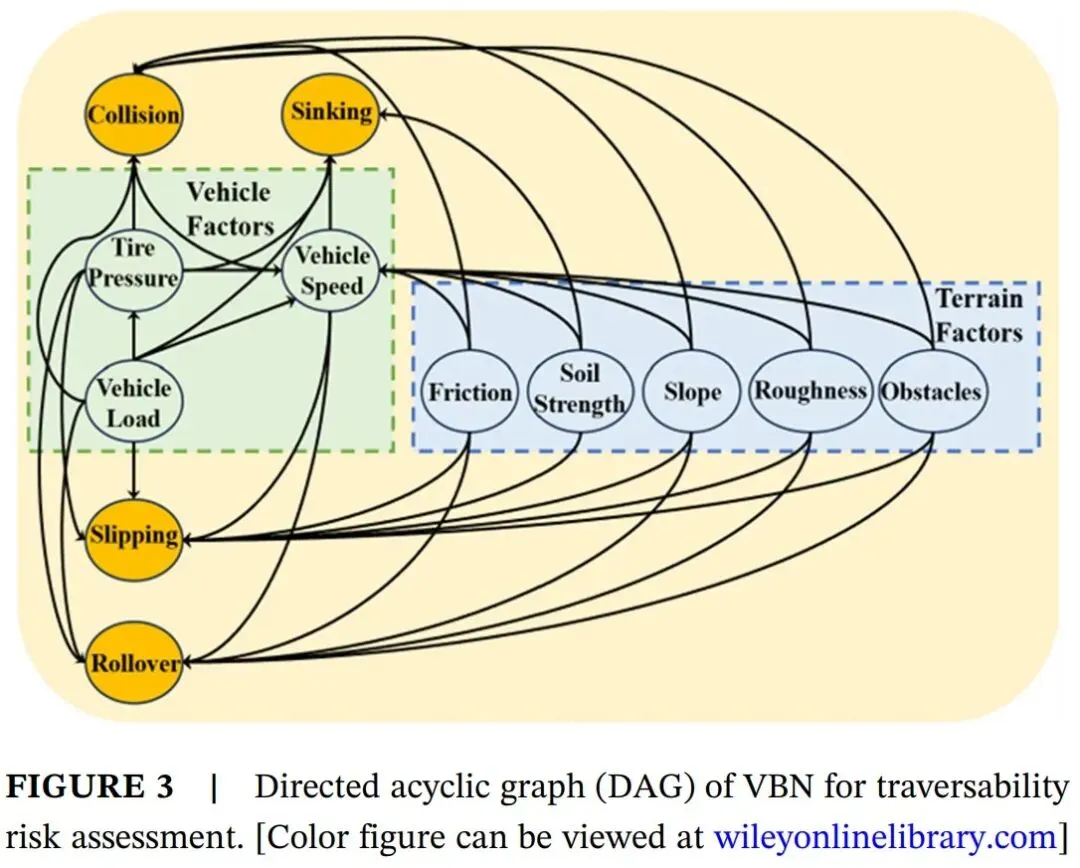
A. 基于有向无环图(DAG)的物理因果网络(VBN)
团队根据车辆动力学和地面力学(Terramechanics),构建了物理节点之间的因果图。例如:
Figure 3 变分贝叶斯网络的有向无环图结构在变分推断(Variational Inference)框架下,通过最大化证据下界(ELBO)来优化网络参数: 其中第一项是观测数据的对数似然(保证准确度),第二项是变分分布与先验分布的KL散度(保证泛化度,防止噪声干扰)。
B. 🧠 核心创新:融合时序特征的损失函数重构(Modified ELBO)
在动态行驶中,静态力学公式无法捕捉轮胎打滑的瞬态过程。团队在特征输入层引入了实时轮式动力学测量,增加了三个关键时序特征:车轮滑移率(Wheel Slip Ratio)、车轮角加速度和实时胎压。其中,车轮滑移率 被严格定义为: ( 为车轮角速度,该项特征能精准捕捉瞬态的滑转特征)。 面对含有噪声的动态环境,传统的变分贝叶斯网络(VBN)无法处理这类时序序列。论文通过将 LSTM 作为变分推断的条件生成器,通过滑动时间窗口处理 IMU 序列反馈(如俯仰角变化率 Pitch Rate、横滚角变化率 Roll Rate),输出隐含状态以修正后验概率分布 。 更硬核的是,为了绝对优先保证极易引发致命事故的“滑移预测”精确度,团队改写了变分自编码推断的证据下界(ELBO)损失函数,提出了带有加权正则化项的 : 在工程设计中,论文严格定义 (对滑移相关隐变量 实施更强的正则化约束,强迫其逼近物理力学先验),而对非滑移隐变量 保持 。这一设计极大地提升了车辆在冰雪等高动态牵引力波动环境下的模型鲁棒性。
- 最终产出:系统在环境栅格地图的每一个 Grid 上进行迭代,计算出滑移、翻车、下陷和碰撞的联合发生概率,最终融合成一张全局风险评估图(Total Risk Map)。
SECTION 04四、 路径规划重构:多目标优化的 R-Hybrid A* 算法
得到了全局风险评估图后,如何指导车辆导航?传统机器人常用的 Hybrid A 算法(混合A)只考虑三维非完整性约束(Kinematic Constraints)和最短距离,如果在冰雪地里用传统算法,它会为了凑最短距离而直接“抄近道”走结冰斜坡,导致车辆报废。 论文对 Hybrid A 的代价函数进行了颠覆性的重构。 改进后的 R-Hybrid A 算法在三维连续搜索空间扩展时,严格加入了车辆几何与地形耦合的运动学约束: 同时强制加入了基于车速置信区间的动态地形限速约束: ( 为俯仰角, 为前轮转角, 为标准正态分布的分位数)。这保证了生成的轨迹不仅空间上可通行,而且在速度控制上不会超出动力学极限。
1. 新一代代价函数设计
在节点扩展时,综合代价函数 依然由历史代价 和启发式代价 组成: 但历史累积代价 被重构为三维多目标优化:
(距离代价):保证路径不过分弯曲,维持基本的行驶效率。
(时间代价):根据前文 MLP 预测的速度均值 动态计算:。如果某种地形允许车速很快,该项代价就会很低。
(风险代价):直接与 VBN-LSTM 输出的联合风险概率挂钩。一旦某个网格的滑移或翻车概率超标,该项时代价将趋于无穷大。
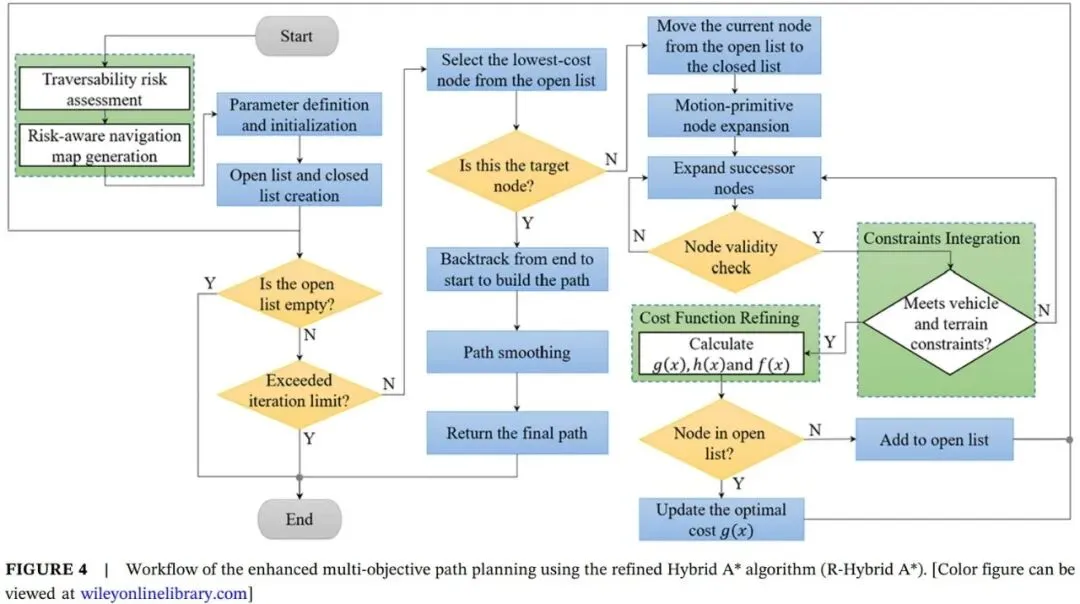
Figure 4 改进 R-Hybrid A 算法的完整程序工作流图通过调整权重系数(),导师或工程师可以根据任务需求自由切换“极限安全模式”或“高效竞速模式”。
SECTION 05五、 实车与仿真验证:冰雪之上的硬核大考
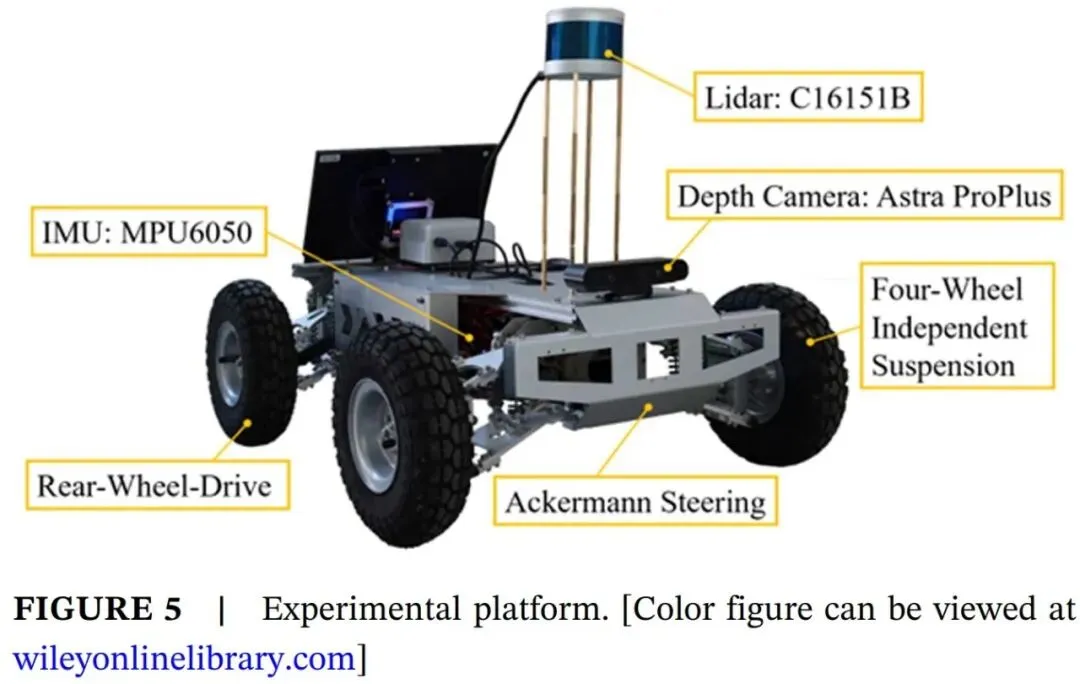
为了证明该算法不是“纸上谈兵”,研究团队在中国东北地区的冬季户外越野场地(涵盖积雪覆盖的斜坡、暗冰路面、冻土不平整草地)进行了实车大考。测试平台搭载了多线激光雷达、双目深度相机和高精度IMU。
Figure 5 移动机器人实验平台与传感器配置图1. 仿真对比:与经典算法的正面交锋
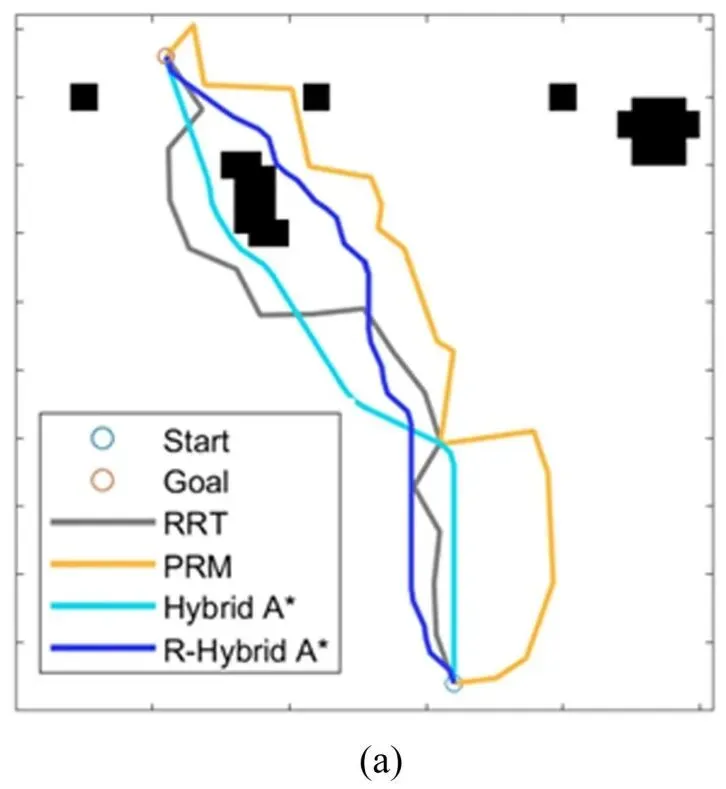
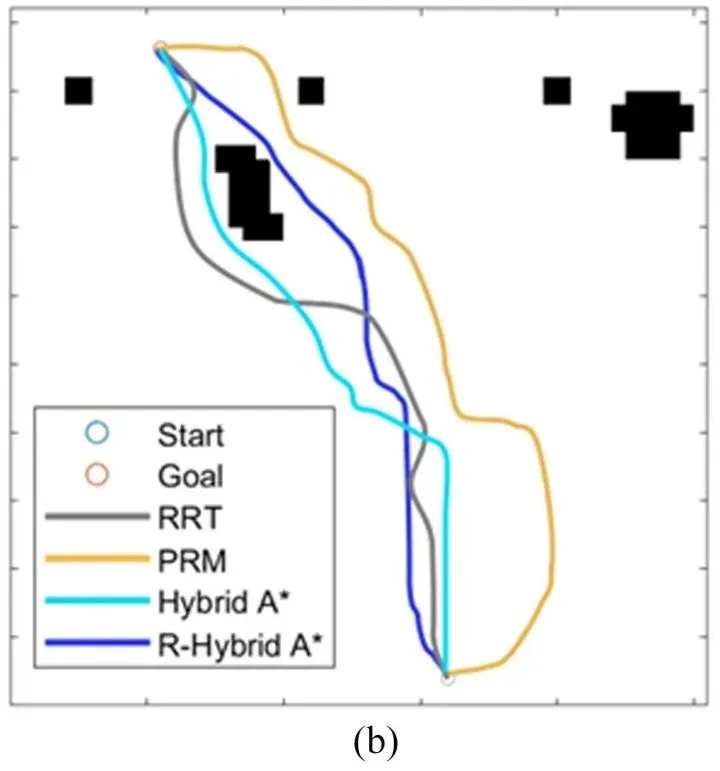
团队将 R-Hybrid A 与传统 Hybrid A 以及未考虑动态速度的传统风险算法(Baseline)进行了同场竞技。
Figure 6 不同导航算法在复杂冬季冰雪斜坡环境下的规划轨迹与风险对比传统 Hybrid A*:直接选择了物理距离最短的冻土陡坡,但在动力学模拟中,由于坡面结冰,车辆中途发生严重侧滑(Slipping Failure),规划失败。
传统风险算法:由于没有考虑速度的动态补偿,在面对松软雪地时盲目减速,导致车辆在模拟中因为动能不足而“下陷瘫痪”(Sinking Failure)。
本文 R-Hybrid A*:完美识别到了结冰斜坡的极高滑移风险,主动规划了一条物理距离稍长、但地形更为平坦固体的绕行路线;同时,在通过一小段软雪地前,算法预测到可以通过适当提高车速(利用动能)安全通过。
2. 实车表现与数据说话
实验统计数据表明,在综合了估计风险、路径效率和总行驶时间的多维评价指标下,本论文提出的算法:
SECTION 06六、 总结
本论文的核心贡献在于:它首次将车速的概率密度分布作为一维核心输入,引入到了越野环境的可通行性评估中,并通过 VBN-LSTM 兼顾了力学可解释性与时序特征,最后用 R-Hybrid A* 实现了真正的风险感知闭环。这为冬季及极端环境下的军用无人车、抢险机器人自主导航提供了一条极具工程落地价值的技术路径。 📌 参考文献[1] Wang N, Li X, Xu S, et al. Traversability risk assessment and path planning for off-road autonomous vehicles in winter conditions[J]. Journal of Field Robotics, 2026, 43(3): 1733-1752. 🔗 原文地址:https://onlinelibrary.wiley.com/doi/10.1002/rob.70242 🚀 关注不走丢,最新自动驾驶与机器人论文解读持续更新! 🧭 越野机器人同好,欢迎加微信交流碰撞火花:15711463195
✨ 持续关注,我们将带来更多自动驾驶与机器人前沿论文解读
✨欢迎对越野机器人感兴趣的同行加微信交流:15711463195
 10个月宝宝每天需要喝多少奶粉?
10个月宝宝每天需要喝多少奶粉?
