本文源于张航宇博士论文期间开展的工作。研究团队自2023年起在福建省南平市持续跟踪植保无人机飞手、经销商和农户,围绕飞防服务质量、自动驾驶采纳和合约关系开展实地调研,并获取了覆盖2020-2024年的厘米级飞行轨迹大数据。
摘要
在很多关于农业人工智能和低空经济的讨论中,一个常见判断是:只要无人机装上传感器、后台能记录轨迹、农户能看到喷洒量,作业质量就容易监督,原来依靠熟人关系和本地声誉形成的服务优势就会被削弱。
福建农林大学张航宇等基于福建省某市2020-2024年植保无人机厘米级飞行轨迹大数据,研究合约稳定性如何通过激励专用性资产投资来提升农机服务质量。论文题为《合约稳定性、专用性投资与农机服务质量提升——基于人工智能自动驾驶植保无人机轨迹大数据的经验证据》,发表于中文顶尖刊物《经济学(季刊)》。
本文最核心的故事可以用一句话概括:自动驾驶要先做高精地图,做地图是有成本的;如果飞手预期只服务这块地一次,他算不过来账,就不会做地图,也就不会用自动驾驶,服务质量也就上不去。
一、监督成本已经下降,本地飞手为什么还是打得更好?
农业社会化服务过去长期面临一个问题:服务质量很难监督。农户很难知道飞手有没有少喷、漏喷、绕飞,也很难把病虫害防治效果中的自然因素和人为努力完全区分开。
植保无人机改变了这一点。今天的无人机作业系统已经可以记录厘米级轨迹、作业面积、飞行高度、作业速度和施药液量。农户不一定需要站在田边盯着飞手,只要看后台截图,就能大致判断作业是否规范。
 图A1(a) 农户正在观看飞手的遥控器
图A1(a) 农户正在观看飞手的遥控器图A1(a) 农户正在观看飞手的遥控器。
 图A1(b) 遥控器实时显示飞行轨迹与质量信息
图A1(b) 遥控器实时显示飞行轨迹与质量信息图A1(b) 遥控器实时显示飞行轨迹与质量信息。
按照金融科技和平台经济的常见逻辑,当服务过程可视化、数据化以后,本地服务商原来依赖信息和信任形成的优势应该下降。例如,平台评分系统降低了乘客监督司机的成本,大数据征信降低了金融机构识别借款人的成本。
问题是,植保无人机数据并不支持这个简单推论。
基于福建省某市2020-2024年的植保无人机轨迹数据,本地飞手和非本地飞手在两个质量维度上均存在显著差异:一个是轨迹质量,即飞行路径是否覆盖地块、是否漏喷;另一个是喷洒质量,即单位面积施药液量是否充分。两组分布的Kolmogorov-Smirnov检验均在1%水平上显著,本地飞手的质量分布系统性地向高质量区间移动。
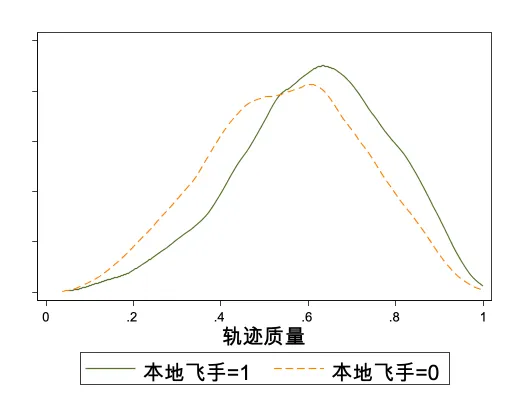 图1(a) 不同类型飞手轨迹质量的分布
图1(a) 不同类型飞手轨迹质量的分布图1(a) 不同类型飞手轨迹质量的分布。
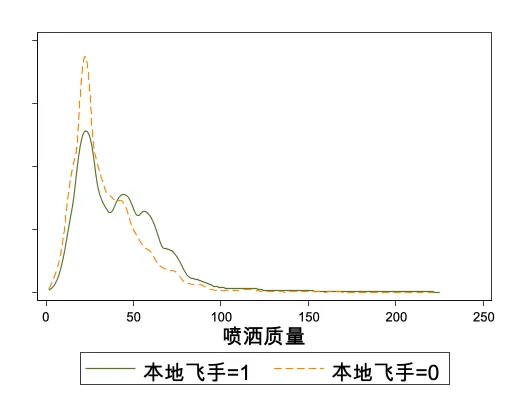 图1(b) 不同类型飞手喷洒质量的分布
图1(b) 不同类型飞手喷洒质量的分布图1(b) 不同类型飞手喷洒质量的分布。
这就引出本文的核心问题:如果无人机已经让作业质量变得可观测,为什么本地服务商的质量优势仍然存在?
答案不在“看不看得见”,而在“愿不愿意投”。
二、自动驾驶不是打开开关就能飞,它先要做一张地块地图
很多产业端朋友对自动驾驶无人机很熟悉:设定参数、规划航线、自动执行,理论上比手动飞行更稳定,也更容易避免漏喷和重喷。但这套系统真正发挥作用之前,有一个很容易被忽略的步骤:地块测绘与航线规划。
飞手需要先围绕特定地块采集边界点,生成高精度数字地图;然后系统再根据地块形状、行距、飞行高度和喷洒速率生成自动航线。也就是说,自动驾驶的基础不是单纯的机型性能,而是地块级数字资产。
 图2 某受访者规划的地块以及基于地块生成的自动驾驶航线
图2 某受访者规划的地块以及基于地块生成的自动驾驶航线图2 某受访者规划的地块以及基于地块生成的自动驾驶航线。
 图A5 无人机操作系统界面截图
图A5 无人机操作系统界面截图图A5 无人机操作系统界面截图。
这种地图有三个经济学特征。
第一,它是固定投资。飞手一旦花时间测绘,成本就已经发生,不能事后退回。
第二,它有极强的地点专用性。为甲地块做的厘米级地图,对乙地块几乎没有价值。
第三,它有明显的跨期复用性。只要还是同一块地,地图后续可以反复使用,边际成本接近于零。
这三个特征放在一起,就决定了自动驾驶的真实经济逻辑:如果只服务一次,地图测绘是不划算的;如果可以长期服务同一块地,地图投资才有机会回本。
这也是一线飞手的直觉判断。一位受访飞手说得很直接:“如果只服务一次,没必要做高清地图,否则来不及去下一家。”
三、自动驾驶确实更好,但为什么没有天然普及?
数据中可以看到,自动驾驶在同等服务质量下所需的单位面积飞行时间更短,轨迹质量和喷洒质量都更高。换句话说,自动驾驶不是概念上更先进,而是在实际作业数据中确实表现出效率优势。
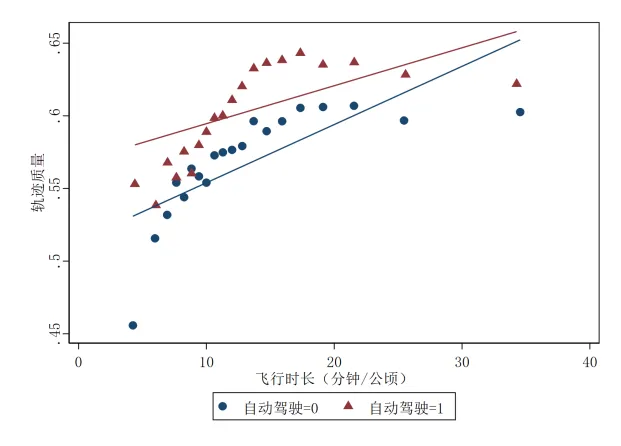 图A2(a) 不同作业模式下飞行时间与轨迹质量的关系
图A2(a) 不同作业模式下飞行时间与轨迹质量的关系图A2(a) 不同作业模式下飞行时间与轨迹质量的关系。
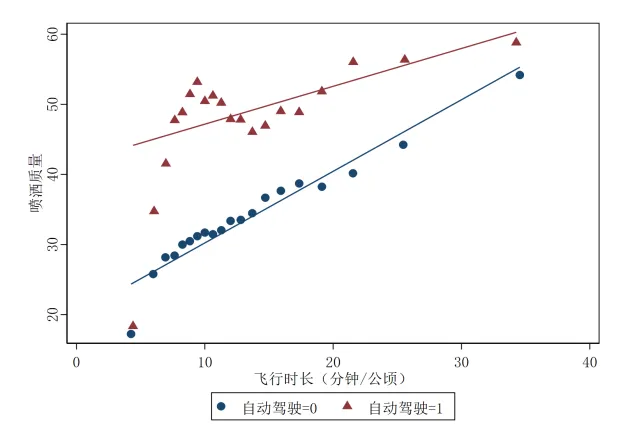 图A2(b) 不同作业模式下飞行时间与喷洒质量的关系
图A2(b) 不同作业模式下飞行时间与喷洒质量的关系图A2(b) 不同作业模式下飞行时间与喷洒质量的关系。
但一个关键事实是:样本中无人机普遍具备自动驾驶能力,手动模式却在相当长时间内仍然大量存在。自动驾驶功能在设备上“有”,并不意味着它在服务市场中“被用起来”。
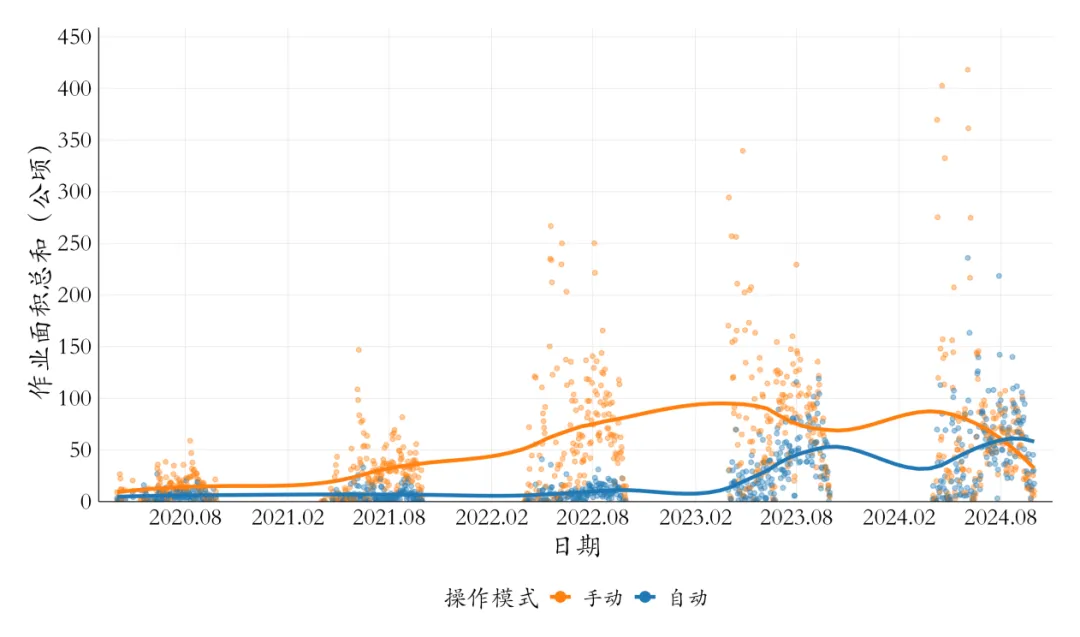 图A3(a) 自动驾驶采纳趋势图
图A3(a) 自动驾驶采纳趋势图图A3(a) 自动驾驶采纳趋势图。
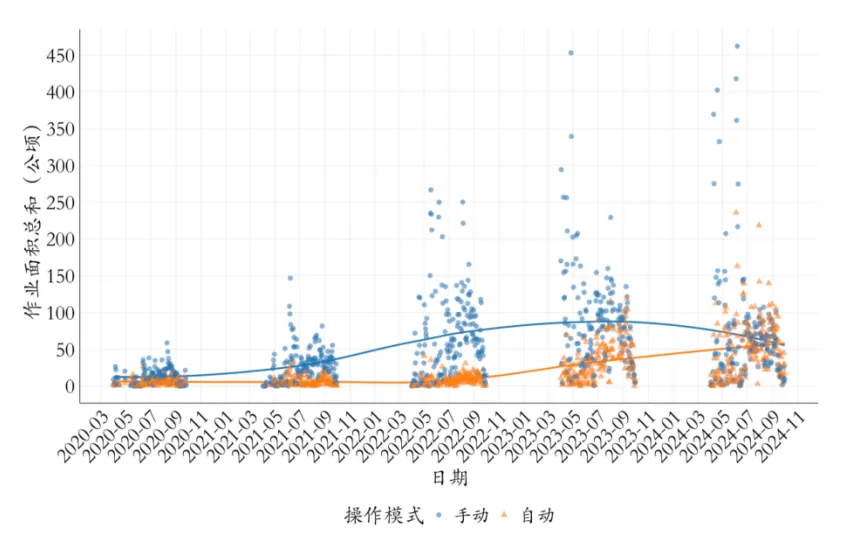 图A3(b) 自动驾驶采纳趋势图
图A3(b) 自动驾驶采纳趋势图图A3(b) 自动驾驶采纳趋势图。
这里的关键不是飞手不会用,而是他要不要为一块特定地先投入测绘成本。对缺乏长期合作预期的飞手来说,最理性的短期选择往往不是做高清地图,而是手动飞完这一单,然后赶去下一家。
这正是合约进入技术问题的地方。合约稳定性不是在替代人工智能,而是在决定人工智能是否值得被使用。
四、把账算清楚:自动驾驶无法单次回本
这篇论文对产业端最有价值的部分,是把“飞手为什么不做高清地图”这件事做了成本收益核算。下面把账拆开说。
1. 前期测绘成本
基于大疆无人机使用说明书和实地调研,水稻田不同自动驾驶地图打点方式的时间成本大致如下。时间成本按照每小时作业机会成本150元估算。
为了给出一个保守且便于理解的核算口径,论文成本收益部分采用约5元/亩作为高质量服务所需的前期专用地图测绘投入。若再加上常规飞行作业成本,陌生地块首次高质量作业总成本约10.5元/亩。
当地服务市场均价约10元/亩。这意味着,如果飞手只做一次服务,采用自动驾驶并承担前期测绘投入后,单次作业会出现约0.5元/亩的直接亏损。
2. 投资回收临界次数
前期地图成本约5元/亩,每次自动驾驶带来的净边际收益约1.5元/亩。因此,回收前期投入所需服务次数为:
这就是本文最重要的成本收益结论:同一地块至少需要约3.33次服务,自动驾驶的前期地图投入才算回本。
在存在本地飞手服务的格点中,年均与最常合作飞手合作约3.2次;而不存在本地飞手服务的格点中,年均与最常合作飞手合作仅约1.9次。前者接近盈亏平衡线,并且地图还可以跨年复用;后者明显低于回本所需次数。
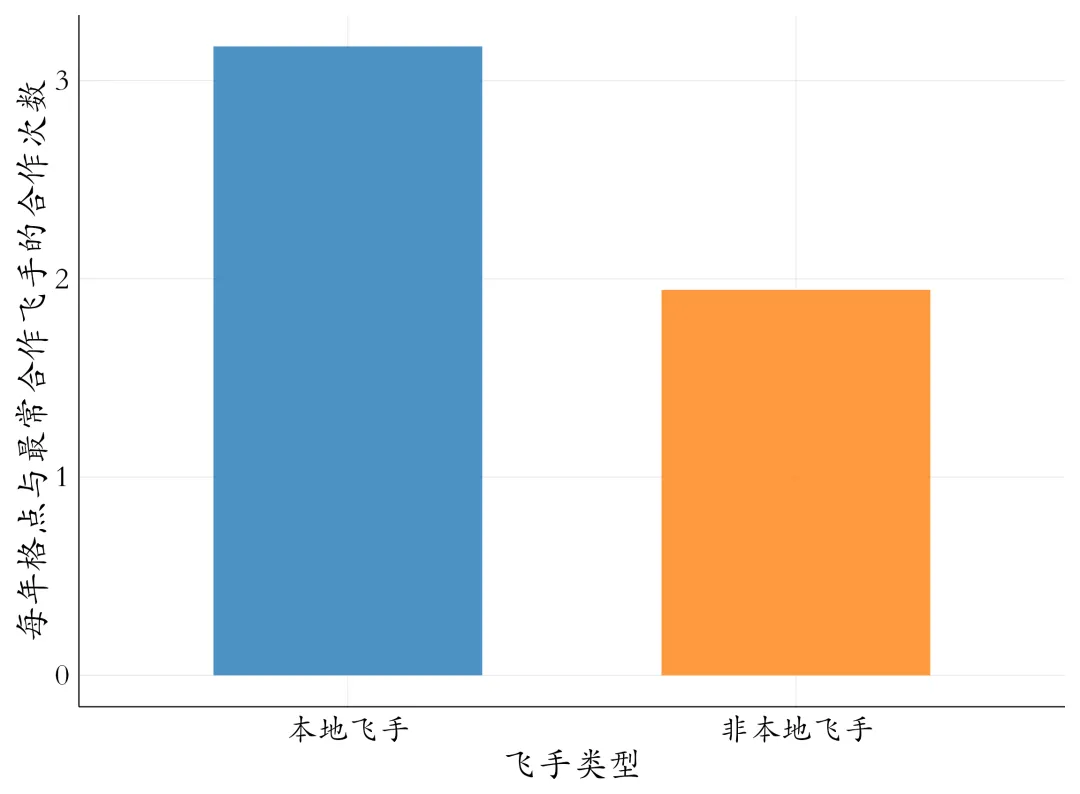 图A7 格点匹配的飞手类型和合作次数的关系
图A7 格点匹配的飞手类型和合作次数的关系图A7 格点匹配的飞手类型和合作次数的关系。
所以,非本地飞手倾向于低质量手动模式,不一定是能力问题,也不一定是职业道德问题,而是一个很现实的经济问题:一次性订单无法覆盖专用性投资。
五、本文的数据:不是问卷回忆,而是厘米级轨迹大数据
本文使用的数据来自福建省某市2020-2024年植保无人机作业记录。原始数据包含453,015条植保无人机飞行轨迹,覆盖当地植保无人机市场约**48%**的份额。
这些数据包括三类信息:基于RTK定位记录的厘米级飞行轨迹,秒级时间间隔;飞行模式参数,包括是否自动驾驶、作业高度和作业行距;流量传感器记录的实际施药液量。
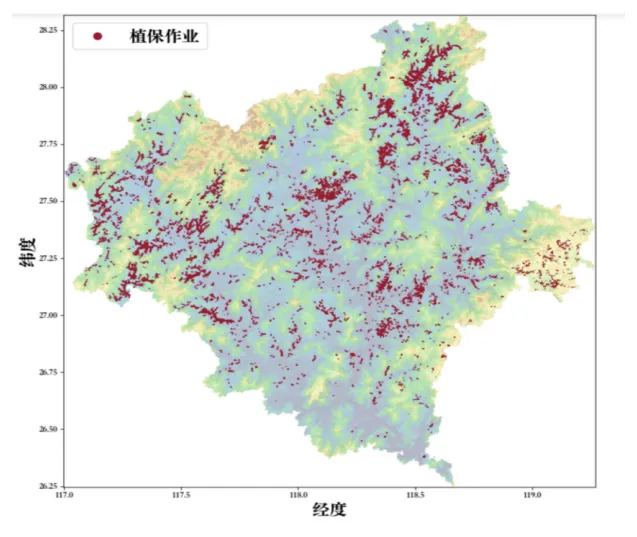 图A6 样本轨迹的空间分布
图A6 样本轨迹的空间分布图A6 样本轨迹的空间分布。
为了把不规则航线转化为可用于计量分析的面板数据,研究将区域划分为200米×200米标准格点,并按照“格点-飞手-日度”维度聚合轨迹。最终样本包含9,172个独立格点和46,874个面板观测值,涉及144,957个架次、总作业面积约927,978亩的水稻植保作业。
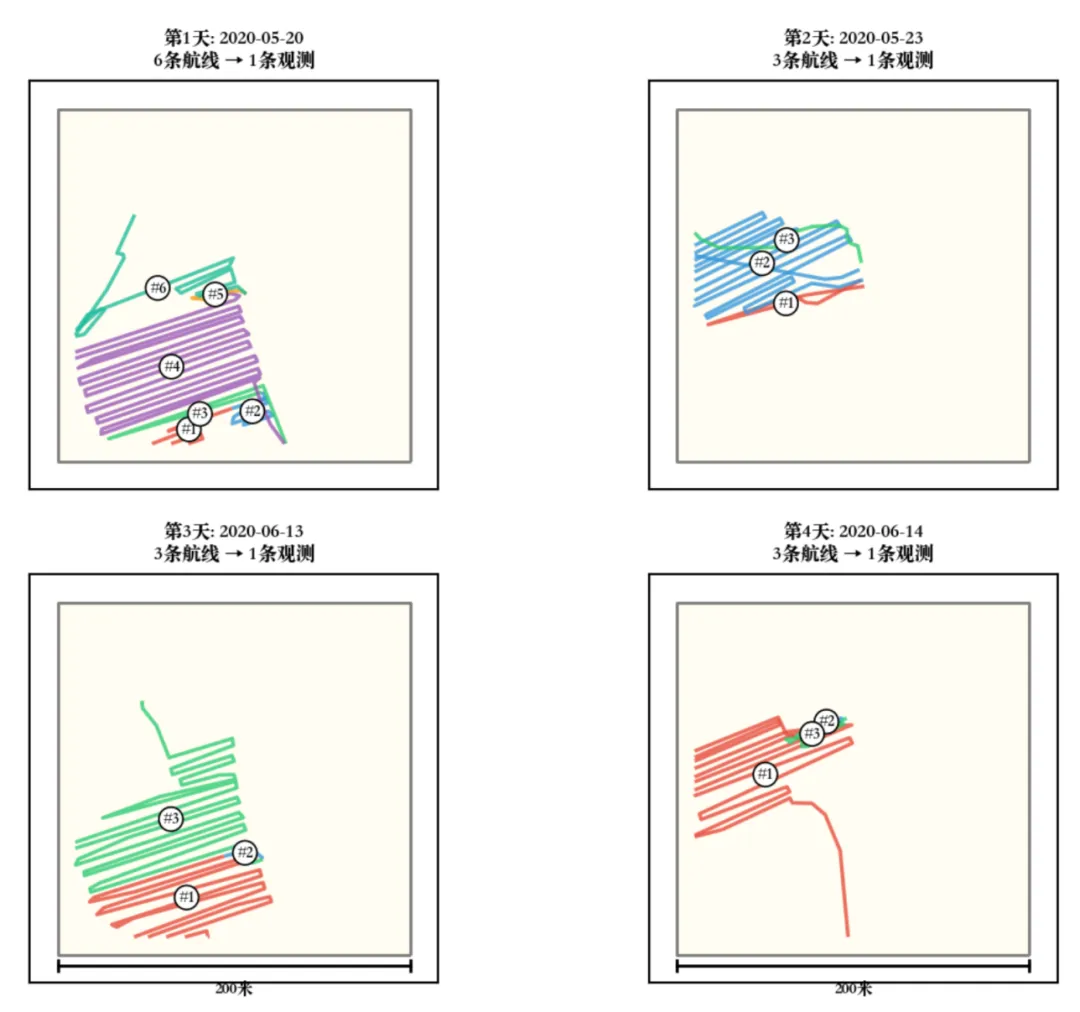 图III1 飞手A在同一格点X四次服务轨迹到格点聚合过程
图III1 飞手A在同一格点X四次服务轨迹到格点聚合过程图III1 飞手A在同一格点X四次服务轨迹到格点聚合过程。
服务质量的测度也不是主观评价,而是两个客观指标。
第一是轨迹覆盖率,即无人机轨迹缓冲区面积占最小外接凸包面积的比例。它衡量的是“飞得准不准、有没有漏喷”。正常轨迹覆盖率可接近98%,问题轨迹可能只有42%。
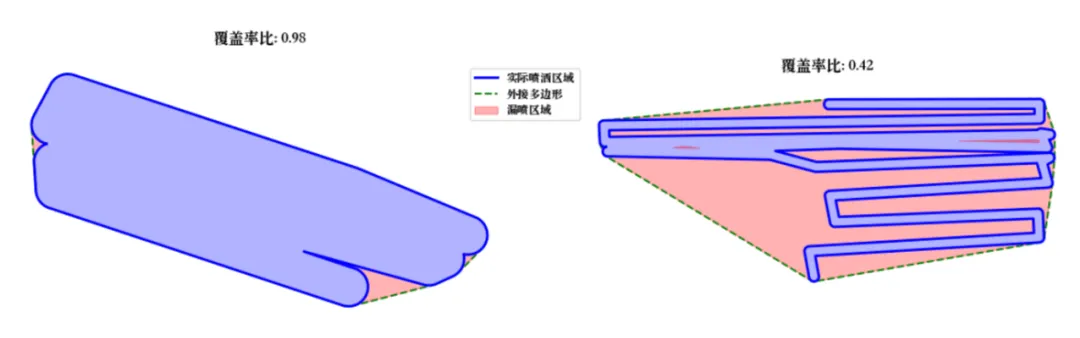 图A8 不同作业轨迹的覆盖率可视化图
图A8 不同作业轨迹的覆盖率可视化图图A8 不同作业轨迹的覆盖率可视化图。
第二是单位面积施药液量,即总施药液量除以作业面积。对于水稻植保而言,施药液量与雾滴沉积和防治效果密切相关,也是农户相对容易监督的质量维度。
研究以飞手是否为本地飞手作为合约稳定性的代理变量。本地飞手不是一个简单的地理标签,而是代表更强的社会联系、声誉约束、重复博弈和长期合作预期。
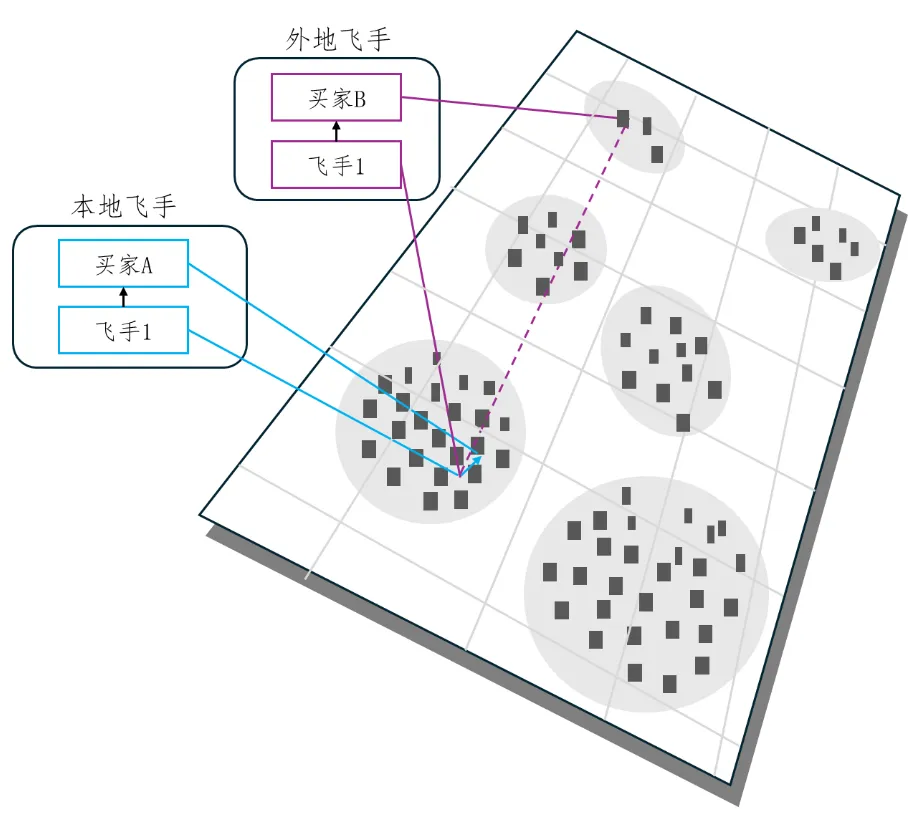 图IV1 本地和外地飞手示意图
图IV1 本地和外地飞手示意图图IV1 本地和外地飞手示意图。
六、实证发现:稳定合约让飞得更准,也让喷得更足
在控制格点固定效应、时间固定效应、机型固定效应和相关控制变量后,本文发现:
- • 本地飞手的轨迹覆盖率比非本地飞手高约4.9个百分点。以非本地飞手样本均值0.547为基准,相当于约**9.0%**的相对质量提升。
- • 本地飞手的单位面积施药液量比非本地飞手高约13.0%。
七、机制检验:关键不是本地身份本身,而是本地身份背后的长期合约
本文进一步检验了机制:合约稳定性是否真的通过专用性资产投资和自动驾驶采纳影响服务质量。
结果显示,在同一格点同一时期,本地飞手的自动驾驶采纳率比非本地飞手高约10.9个百分点。在自动驾驶样本中,本地飞手设定的作业行距显著更窄。行距越窄,意味着航线规划越细,喷洒覆盖越充分,也意味着飞手在测绘和规划阶段投入了更多精力。
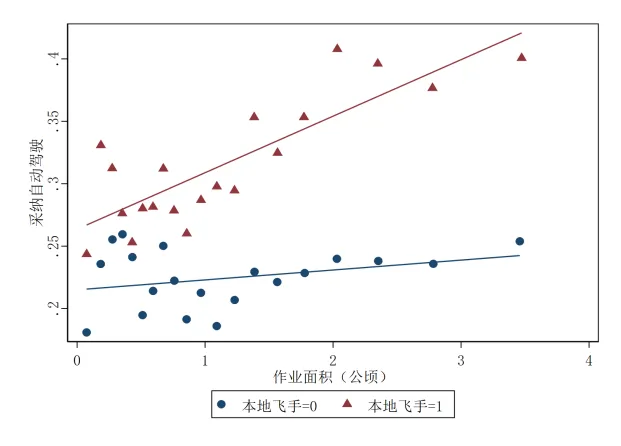 图A4(a) 不同主体作业面积与自动驾驶采纳的关系
图A4(a) 不同主体作业面积与自动驾驶采纳的关系图A4(a) 不同主体作业面积与自动驾驶采纳的关系。
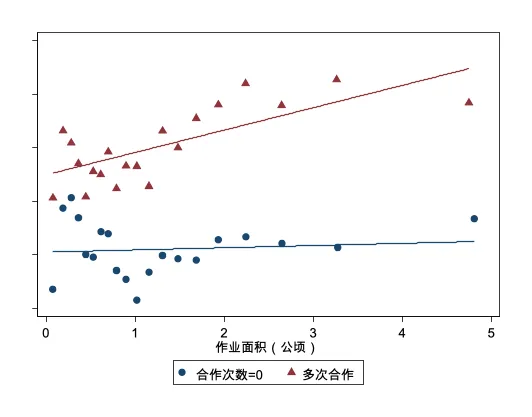 图A4(b) 不同合作模式作业面积与自动驾驶采纳的关系
图A4(b) 不同合作模式作业面积与自动驾驶采纳的关系图A4(b) 不同合作模式作业面积与自动驾驶采纳的关系。
更重要的是,自动驾驶地图具有明显的跨期复用特征。格点前一期自动驾驶采纳率与当期采纳率高度相关,拟合线接近45度线,说明一旦高精地图建立,后续使用的边际成本很低。
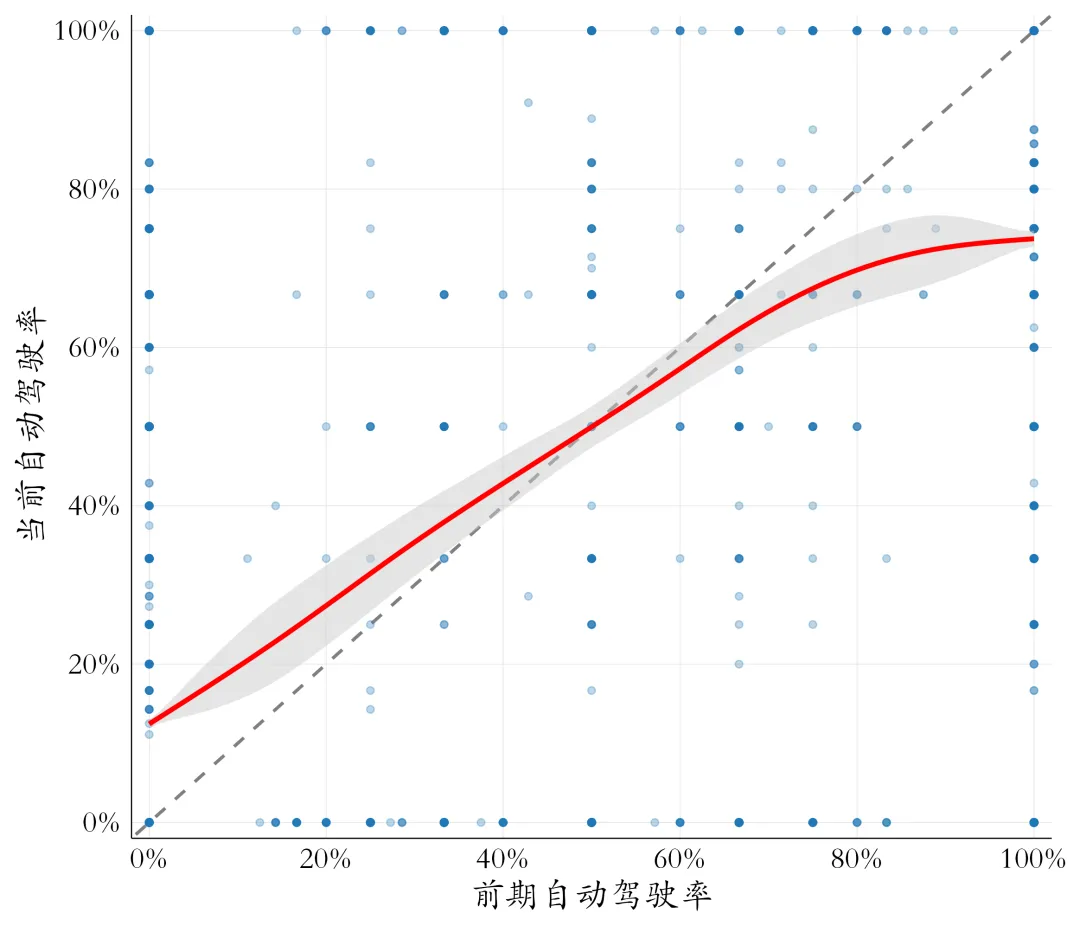 图A9 自动驾驶采纳的时序相关性分析
图A9 自动驾驶采纳的时序相关性分析图A9 自动驾驶采纳的时序相关性分析。
这就构成了完整机制链条:
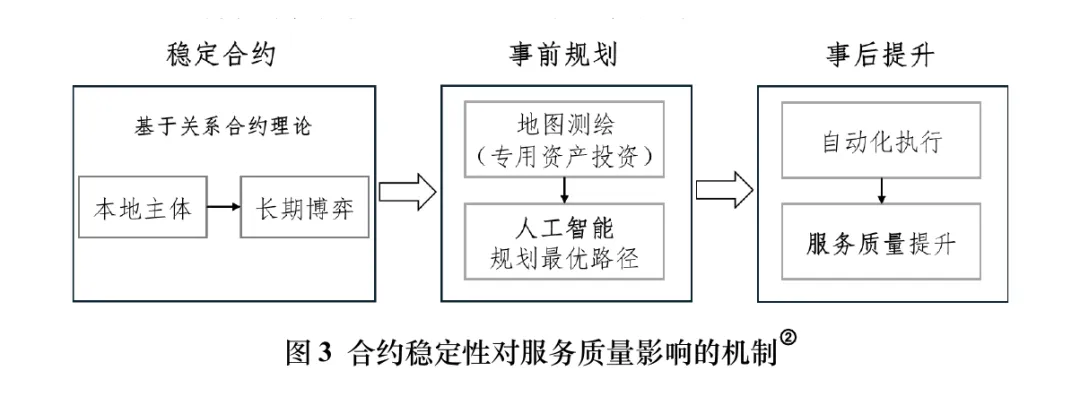 图3 合约稳定性对服务质量影响的机制
图3 合约稳定性对服务质量影响的机制图3 合约稳定性对服务质量影响的机制。
用更直白的话说:本地飞手不是天然“更好”,而是更有可能面对未来多次合作;未来多次合作让地图投资可以回本;地图投资让自动驾驶值得采用;自动驾驶最终提升服务质量。
八、一个反常识结论:AI没有消除合约,AI把合约问题推到了更前面
传统信息经济学关心的是事后监督:农户看不看得到飞手有没有偷工减料。
无人机轨迹、后台截图和流量传感器确实降低了事后监督成本。这个判断没有错。
但本文强调的是另一个问题:技术可监督,不等于技术值得投入。
自动驾驶需要前期做地图,地图是专用性资产。只要合约不稳定,飞手就担心投入之后被“套牢”:农户下一次可能换飞手,也可能压价,也可能不愿为高质量服务支付溢价。于是,飞手即便知道自动驾驶质量更高,也可能选择短期更划算的手动模式。
因此,人工智能在这里没有消除合约的重要性,而是改变了合约治理的核心。
过去的合约问题是:服务后,我怎么知道你有没有认真干?
现在的合约问题变成:服务前,你凭什么相信这笔专用性投资能回本?
这个逻辑并不限于农业植保。在智能制造中,为特定客户改造生产线是专用性投资;在自动驾驶物流中,为特定路线采集高精地图是专用性投资;在医疗AI中,为特定科室训练模型和整理数据也是专用性投资。凡是AI落地依赖场景专用资产的地方,合约稳定性都会成为关键条件。
九、给产业端和研究端的启示
对无人机服务商和飞手来说,设备升级当然重要,但仅靠设备升级并不能自动带来利润。真正能形成质量优势的,往往是本地化服务网络、重复订单、地块地图资产和长期客户关系。投资一张高清地图,本质上是在投资一段稳定关系。
对农户、合作社和农场主来说,不要只看单次作业价格。如果每次都临时换飞手,每次都从零开始,短期似乎省了一点服务费,长期损失的是地块级数字资产积累和稳定作业质量。稳定合作并不是“讲人情”,而是在为地块持续积累可复用的数据资产。
对平台和经销商来说,未来竞争不应只停留在卖设备和接订单上。平台可以考虑建立高精地图的确权、托管、授权和流转机制,让飞手前期测绘投入在合作关系变化后仍有回收可能,进而降低专用性投资的套牢风险。
对政策制定者来说,低空经济不能只看作业面积、设备保有量和飞行架次。高质量低空服务的关键瓶颈,可能不是“有没有飞机”,而是“有没有激励飞手把飞机用到最优”。
政策可以从三个方向发力:一是完善农业高精地图和作业数据的流转平台;二是探索长期服务合约范本和履约信用机制;三是通过合作社、农服组织或公共平台降低小地块测绘成本。
十、研究局限与未来方向
本文基于福建省单一地市的水稻植保无人机轨迹数据展开分析,结论在不同作物、不同地形和不同服务市场中的外部有效性仍需进一步检验。丘陵山区、果园、玉米高秆作物、规模农场和小农户零散地块中,自动驾驶地图投入的成本收益结构可能并不完全相同。
同时,随着卫星影像、RTK、视觉识别和平台化地图服务的发展,未来地图测绘成本可能下降。测绘成本下降后,合约稳定性的重要性是否会降低,还是会转向新的数据资产、算法模型和服务组织问题,也值得继续跟踪。
还需要特别说明的是,本文使用的轨迹数据截止到2024年。2024年以后,大疆等头部企业又进一步优化了建图和航线规划功能,这意味着未来讨论的重点可能不再只是“是否采用自动驾驶”,而会进一步转向“自动驾驶地图质量有多高”。地图质量会直接决定是否重喷、漏喷,以及能否准确扣除田埂、沟渠、边角地等非作业区域。以无人机施肥为例,如果建图时能够把小田埂精细抠掉,减少无效撒施,节省约10%的肥料并非小数目;对于高频作业、规模化服务和肥料价格较高的场景,这部分收益已经相当可观。
作者团队目前正在福建省继续推进相关研究,欢迎具有低空经济、农业工程、合约理论、产业组织和公共政策背景的同行交流合作。
论文信息:张航宇、袁菱苒、刘欣煜、黄季焜,《合约稳定性、专用性投资与农机服务质量提升——基于人工智能自动驾驶植保无人机轨迹大数据的经验证据》,《经济学(季刊)》。基金资助:国家自然科学基金项目(72442001,72433001);教育部人文社会科学研究青年基金项目(25YJC790143)。
 10个月宝宝每天需要喝多少奶粉?
10个月宝宝每天需要喝多少奶粉?
