6月17日,工信部公示了《智能网联汽车 自动驾驶系统安全要求》强制性国家标准报批稿(下文简称GB 44721),公示期到24日截止。紧接着,各种“纯视觉走L3的路,被堵死了"的自媒体文章在行业里传播。文章言之凿凿地宣称标准"禁止单一纯视觉方案用于L3/L4",要求L3必须"摄像头+77GHz毫米波雷达双传感器融合",L4还得再加"激光雷达第三重感知冗余"。
我倾向认为——所谓的"国标堵死纯视觉",大概率是被过度解读甚至曲解了。
标准原文里既没有"禁止纯视觉"这五个字,也压根没有指定过任何具体的传感器硬件组合。
先说一个最简单的核实方法。所有声称标准"禁止纯视觉"的自媒体文章,都指向了同样的文本依据——它们说标准第5.2节规定了"感知系统强制安全要求",里面写了L3必须"摄像头+77GHz毫米波雷达",L4还得再加激光雷达。
但事实是,我翻到GB 44721报批稿目录的第5章,发现第5.2节的标题根本不是"感知系统",而是"人机交互"。整章5.1到5.4,分别是DDT执行、人机交互、用户告知、其他要求,没有任何一个叫"感知系统强制安全要求"。
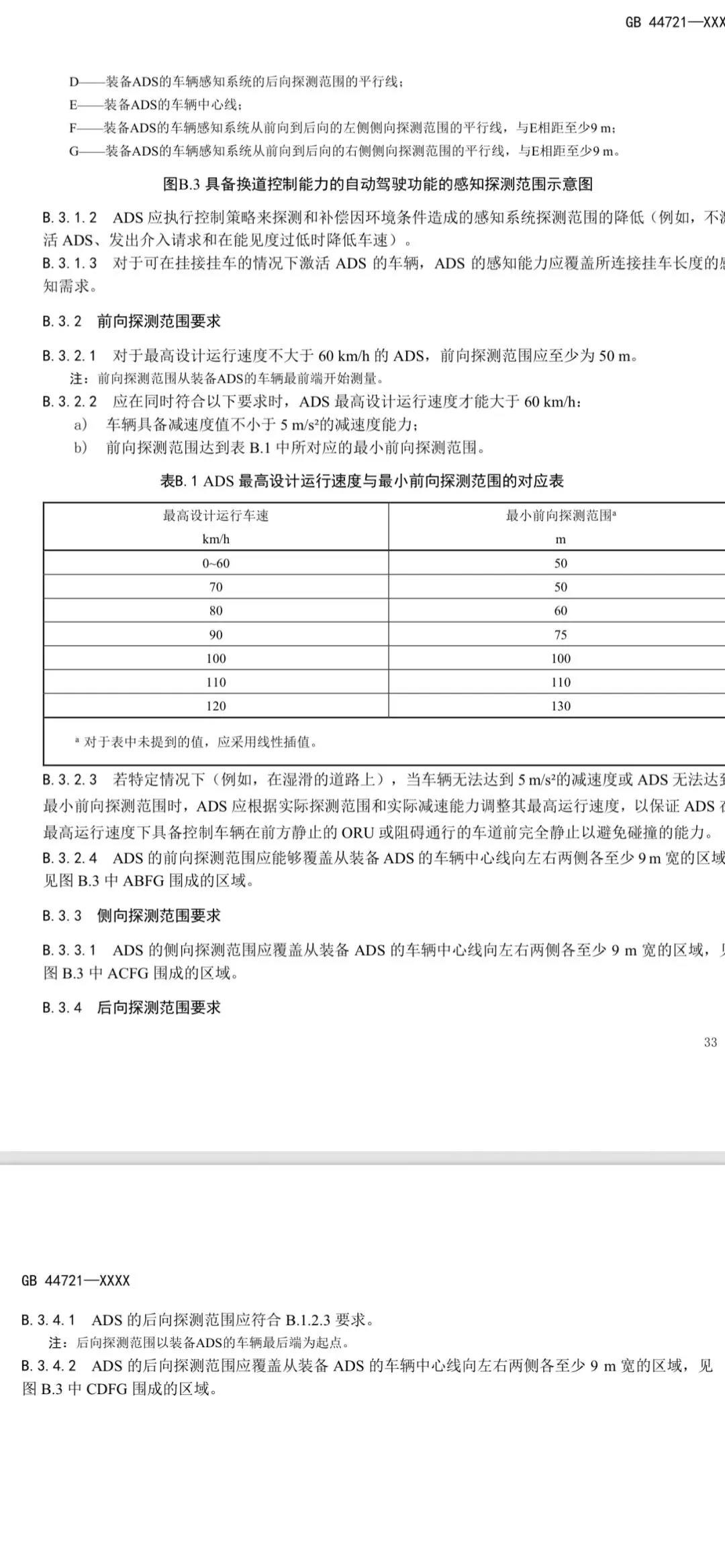
感知系统的技术要求,标准放在了附录B.3里。但B.3的全篇内容只干了一件事——规定探测范围。
标准规定的是"得看多远",不是"得用什么看"
我直接把原文截出来:B.3.1.1说的是"ADS的感知系统应至少能探测以下区域的驾驶环境(前方道路几何形状、车道线)和交通动态(车辆、行人等)",B.3.2.1说"最高设计运行速度不大于60km/h的ADS,前向探测范围应至少为50m",B.3.2.2说速度要大于60km/h,探测范围要对应表B.1的数值,且车辆减速度不低于5m/s²。
通篇读下来,标准关心的维度就三个:探测了多远、覆盖了多宽的扇面、在恶劣环境下能不能自动降级。至于用什么传感器来实现这个探测距离——摄像头、毫米波雷达、激光雷达、超声波,或者组合方案——标准一个字都没有提。
这不是标准制定者的疏忽。恰恰相反,这是GB 44721最核心的立法哲学:基于功能安全和预期功能安全的性能指标法。标准扮演的不是技术路线的"裁判员",不替行业决定哪种传感器方案是"正确"的。它扮演的是"守门员"——系统能在所有规定场景下达到规定的安全水平,哪怕只用两个摄像头,标准也认可;系统如果在某个场景存在致命缺陷,就算装了八线激光雷达也过不了。
据我观察,这种"性能导向"的立法思路,和国际上UN R 157(UNECE关于ALKS的法规)是一致的。UN R 157同样没有规定必须装什么传感器,而是围绕"系统能在何种条件下安全执行动态驾驶任务"来设定验收标准。GB 44721编制说明里也明确提到参考了联合国自动驾驶系统安全要求技术法规和UN R 157,这一点完全对得上。
"单点失效"不等于"必须异构传感器"
那标准里有没有关于传感器冗余的要求呢?有,在附录D(安全档案规范)的D.2.4.2里。
D.2.4.2.4列了几种可选的安全措施:使用独立系统实现冗余设计、执行相同功能的多样性系统设计、限制自动驾驶功能等。D.2.4.2.5要求"避免因电气/电子系统的单点故障导致完全失去主动转向、主动制动和主动驻车能力"。
注意标准用的是"或"——"独立系统"和"多样性系统"是二选一的关系,而不是强制要求"多样性"。
这就引出了一个问题:纯视觉方案能不能通过"单点失效"这个关?
按照D.2.4.2.4 b)的要求,使用"独立系统实现冗余设计",纯视觉方案完全可以做到。行业内已经有成熟做法——通过多个不同安装位置、不同焦距的摄像头构成异构探测网络,前视短焦、前视长焦、侧视环视摄像头各司其职,任何一颗摄像头的失效都可以由其他摄像头补位。
换言之,标准要求的是"任何单一组件挂了,系统还能安全执行MRM",而不是"传感器必须是不同物理原理"。用三颗不同焦距的摄像头互为备份,从功能安全的角度完全讲得通。当然,这段论证需要写进安全档案里,由企业自己证明。
说实话,我在这个行业干了这几年,最大的感触是:技术问题到了舆论场,往往会被简化成"派系斗争"和"谁是输家"的叙事模板。纯视觉 vs 多传感器融合,在工程世界里本来就是一个基于场景、成本、算力的综合权衡——城市L2++和高速L3对传感器的要求本来就不一样,不同ODD下的最优解也截然不同。但到了自媒体手里,就变成了"纯视觉完了"和"激光雷达赢了"的二极管叙事。
我不反对激光雷达,也不站纯视觉。我反对的是把一份没正式发布的报批稿、一条不存在的条款、一篇荐股帖里的断言,打包成"国标结论"来消费行业焦虑。
有一点没说错:安全档案的门槛确实是真格的
说了这么多,我不是在否定这份标准的意义。恰恰相反,我认为GB 44721报批稿是中国自动驾驶立法的一次重要升级。它的厉害之处不在于"指定传感器",而在于通过安全档案(Safety Case)机制,让安全性论证从"我们说安全"变成"你得证安全"。
标准要求企业以"声明—论据—证据"的结构,对自动驾驶系统的安全性进行系统论证,将仿真、场地、道路测试纳入统一验证框架。这个门槛比"装几个传感器"高得多。说白了,不管你走什么技术路线,L3/L4的准入都不是靠堆硬件就能过的,企业需要拿出完整的安全论证链条,证明自身的感知系统在任何规定场景下都能完成探测、决策逻辑在任何边缘场景下都不会失控、MRM在任何故障场景下都能兜底。
这份标准还有4天的公示期(到6月24日),2027年7月1日才正式实施。现在还有时间让行业冷静下来,好好读一遍原文件再说话。
 10个月宝宝每天需要喝多少奶粉?
10个月宝宝每天需要喝多少奶粉?
