一、本周关键新技术速览
学术前沿
发布日期 | 技术/论文 | 机构 | 核心内容 | 备注 |
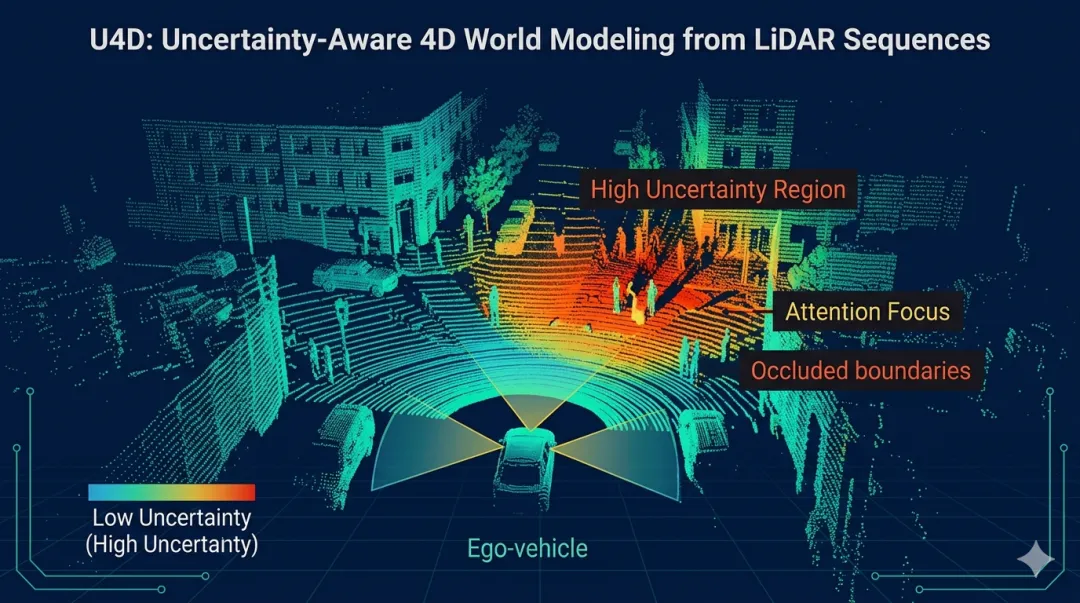
2026-06-05 | U4D: Uncertainty-Aware 4D World Modeling | 南京航空航天大学、新加坡国立大学等 | 将不确定性感知引入4D LiDAR世界建模,采用两阶段扩散生成策略 | CVPR 2026 Highlight |
2026-06-06 | 小鹏世界模型技术图谱 | 小鹏汽车 | 公开X-Mind、X-World、X-Foresight、X-Cache技术闭环 | CVPR 2026专题演讲 |
2026-06-03 | WorldLens | 新加坡国立大学等 | 在真实世界中评测驾驶世界模型 | CVPR 2026 Oral |
2026-06-01 | NVIDIA Alpamayo 2 Super | NVIDIA | 320亿参数VLA模型,支持360度感知 | GTC台北发布 |
工业动态
发布日期 | 公司/产品 | 动态 | 关键信息 | 影响 |
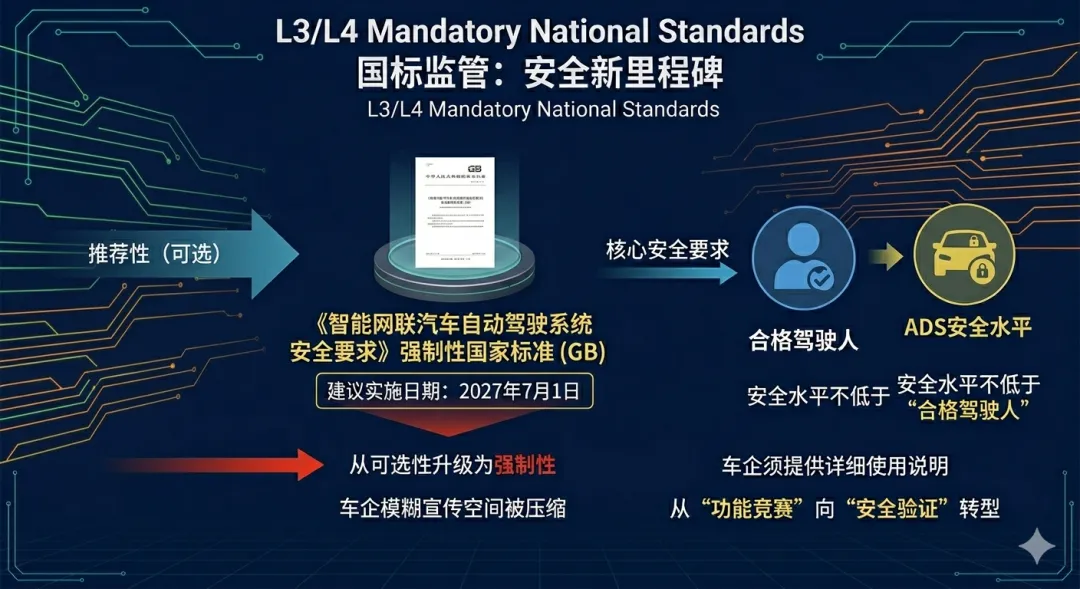
2026-06-17 | 工信部 | L3/L4强制国标公示 | 《智能网联汽车自动驾驶系统安全要求》报批稿公示,建议2027年7月1日实施 | 首部L3/L4强制性国标 |
2026-06-12 | 特斯拉 | Robotaxi运营情况 | 车队59辆,碰撞率为人类四倍,扩张计划推迟 | 纯视觉端到端面临挑战 |
2026-06-18 | Waymo | 车辆召回 | 召回3871辆第五代系统车辆,因施工路段识别问题 | 多传感器融合存在局限 |
2026-06-10 | 丰田 | 投资Tier IV | 取得Tier IV约1%股权(10亿日元) | 传统车企布局L4 |
二、值得关注的研究方向
1. 端到端自动驾驶的量产落地
特斯拉Robotaxi车队目前59辆,碰撞率为人类驾驶员的四倍,反映出纯视觉端到端方案在L4城市场景中仍存在长尾安全问题。中国头部车企(华为、小鹏、理想)多采用多传感器融合+世界模型/VLA的架构。L3/L4强制国标要求2027年前达到"合格驾驶人"水平,可能推动行业从功能竞赛转向安全验证。
2. 世界模型与仿真技术
世界模型正从学术研究向工业应用过渡。小鹏X-World已部署至量产车型,华为ADS 5的WEWA 2.0引入多智能体机制,NVIDIA推出OmniDreams。U4D将不确定性感知引入世界建模,为高熵区域分配更多生成资源。
三、行业动态
头部公司动态
特斯拉
Robotaxi运营面临挑战。据彭博社6月12日报道,车队规模为59辆(分布于奥斯汀、达拉斯、休斯顿),与此前"年底覆盖半数人口"的目标存在差距。马斯克将大规模扩张计划推迟至2026年底或2027年初,等待FSD v15版本。马斯克表示,无监督车辆碰撞率约为人类驾驶员的四倍,系统在铁轨穿越、故障信号灯处理等场景表现保守。FSD转移服务在北美限时回归。
华为
ADS 5.0(WEWA 2.0架构)于4月23日发布。主要升级包括:云端世界引擎引入多智能体机制,训练强度提升;车端安全风险场理论,碰撞风险降低;首发乾崑OS操作系统,信号时延降低。累计搭载量超过170万辆,辅助驾驶里程超过100亿公里。2026年计划研发投入180亿元。
小鹏
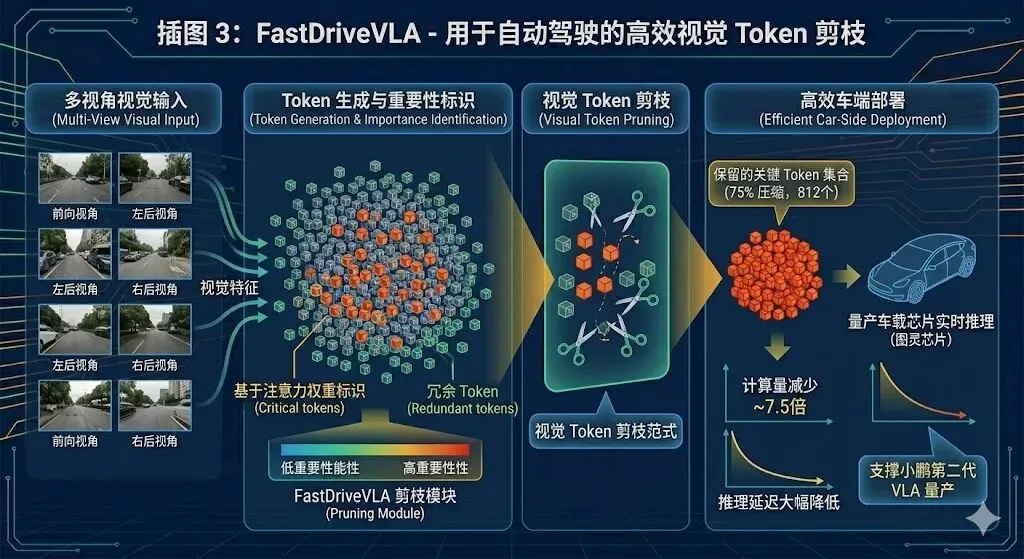
在CVPR 2026进行世界模型专题演讲,与特斯拉、Waymo、英伟达同台,提出"VLA+世界模型"架构。第二代VLA已实现量产,推送首月用户辅助驾驶里程占比超过50%;世界模型X-World基于视频扩散技术,已部署至量产车型。联合北大的FastDriveVLA入选AAAI 2026,实现视觉Token剪枝(减少75%)。万卡级智算集群单GPU训练效率一年提升约10倍。
理想/蔚来/其他
理想MindVLA在英伟达GTC 2026公布进展;蔚来乐道L90搭载自研5nm智驾芯片"神玑NX9031";丰田投资Tier IV布局L4;Rivian CEO表示自动驾驶功能可能免费。
技术路线观察
端到端路线分化
目前三条路线并行:(1)特斯拉/小鹏:纯视觉+VLA/世界模型;(2)华为:World Action单一路线;(3)Waymo:多传感器融合+高精地图。Waymo召回与特斯拉运营情况表明,各路线在施工区域、长尾场景的安全问题尚未完全解决。
L3商用与L4发展
中国L3/L4强制国标计划2027年7月实施,L3规模化商用进入准备阶段。L4级Robotaxi(特斯拉、Waymo)均遇到运营挑战,从L2+到L4的跨越难度超出部分预期。
高阶智驾普及化
Rivian CEO提出自动驾驶可能免费的判断,与特斯拉FSD收费模式不同。若自动驾驶成为标配,软件收入模式可能面临调整。
监管与政策
中国
6月17日工信部公示《智能网联汽车自动驾驶系统安全要求》强制性国标(报批稿),适用于L3/L4级M类、N类车辆。核心要求:ADS安全水平不低于"合格驾驶人";车企须提供使用说明。公示期至6月24日,建议实施日期2027年7月1日。从推荐性(GB/T)升级为强制性(GB)。
美国
特朗普政府4月宣布简化自动驾驶测试和部署流程,减少事故报告要求。但特斯拉Robotaxi运营情况和Waymo召回事件,可能促使NHTSA重新评估监管力度。
欧洲
特斯拉FSD在欧盟17个国家道路安全行驶超过100万公里,捷克2026年1月1日起启用L3级自动驾驶法规。
四、本周推荐论文详解
论文1:U4D: Uncertainty-Aware 4D World Modeling from LiDAR Sequences
发布日期:2026-06-05(CVPR 2026 Highlight)
机构:南京航空航天大学、新加坡国立大学、复旦大学等
主要内容
U4D提出了一种不确定性感知的4D LiDAR世界建模框架。现有框架通常对所有空间区域均匀建模,忽略了不同区域的不确定性差异。U4D的核心方法包括:
1.空间不确定性估计:利用预训练分割模型,通过香农熵计算每个点的不确定性地图,定位语义上具有挑战性的区域(远处表面、遮挡边界、小尺度物体)。
2.两阶段扩散生成:(1)不确定性区域建模阶段——无条件扩散重建高熵区域;(2)不确定性条件补全阶段——以重建区域为结构先验,条件生成剩余区域。
3.MoST模块:自适应融合空间和时间表征,保证跨帧时序一致性。
在nuScenes和SemanticKITTI数据集上,U4D在几何保真度、时序一致性和下游任务(语义分割)上达到现有较好水平。
核心创新点
1. 将空间不确定性感知引入4D LiDAR世界建模
2. "由难到易"生成策略,为高熵区域分配更多生成资源
3. MoST模块动态平衡空间细节与时序连续性
应用价值
U4D的不确定性感知设计对自动驾驶仿真具有参考价值:在仿真中,远处车辆和遮挡行人的生成质量影响规划模块的安全裕度。U4D通过显式建模不确定性,使生成资源向高风险区域倾斜。此外,U4D生成的数据可用于提升下游感知模型(语义分割mIoU提升1-2%)。
论文2:WorldLens: Full-Spectrum Evaluations of Driving World Models in Real World
发布日期:2026-06-03(CVPR 2026 Oral)
机构:新加坡国立大学等
主要内容
WorldLens在真实世界中对驾驶世界模型进行评测,现有评估体系多关注仿真环境指标(如FID、FVD)。论文构建了涵盖感知一致性、物理合理性、时序稳定性、开世界泛化四个维度的评估协议。
核心发现:现有世界模型在仿真环境中表现较好,但在真实世界的开场景(雨夜、施工区域、异形障碍物)中,物理合理性和感知一致性下降。
核心创新点
1. 真实世界驾驶世界模型的评估框架
2. 提出"感知一致性-物理合理性-时序稳定性-开世界泛化"四维评估体系
3. 开源真实世界评测数据集
应用价值
WorldLens解决了世界模型工业化的一个瓶颈——如何评估世界模型在真实世界中的表现。当前小鹏X-World、华为世界引擎、NVIDIA OmniDreams等世界模型均声称具备量产能力,但缺乏统一的真实世界评估标准。WorldLens提供的框架可用于车企内部的世界模型验收测试。
论文3:FastDriveVLA: Efficient Visual Token Pruning for Autonomous Driving
发布日期:2026-03-20(AAAI 2026)
机构:小鹏汽车、北京大学
主要内容
FastDriveVLA针对VLA模型车端部署的算力限制,提出视觉Token剪枝方法。现有VLA模型处理多视角图像时产生大量视觉Token(如3249个),导致车端推理延迟较高。核心方法包括:
1.自适应Token重要性评估:基于注意力权重动态评估每个视觉Token对驾驶决策的贡献度
2.分层剪枝策略:在低层保留全局场景信息,在高层剪除冗余细节Token
3.性能保持机制:通过知识蒸馏确保剪枝后模型的驾驶性能
实验结果:视觉Token从3249减少到812(减少75%),计算量减少约7.5倍,预填充时间减少约3.7倍,L2轨迹误差和碰撞率指标与未剪枝基准相当或略优。
核心创新点
1. 针对自动驾驶VLA模型的视觉Token剪枝系统
2. 剪枝75%时推理效率大幅提升,性能保持
3. 知识蒸馏机制确保驾驶能力保持
应用价值
FastDriveVLA支撑了小鹏第二代VLA的量产。当前VLA模型面临车端部署挑战——模型参数量大、视觉Token多、推理延迟高。FastDriveVLA通过剪枝使VLA模型在车载芯片上的实时推理成为可能。该技术也可迁移至其他多模态大模型的车端部署。
论文4:Test-Time Trajectory Optimization for Autonomous Driving
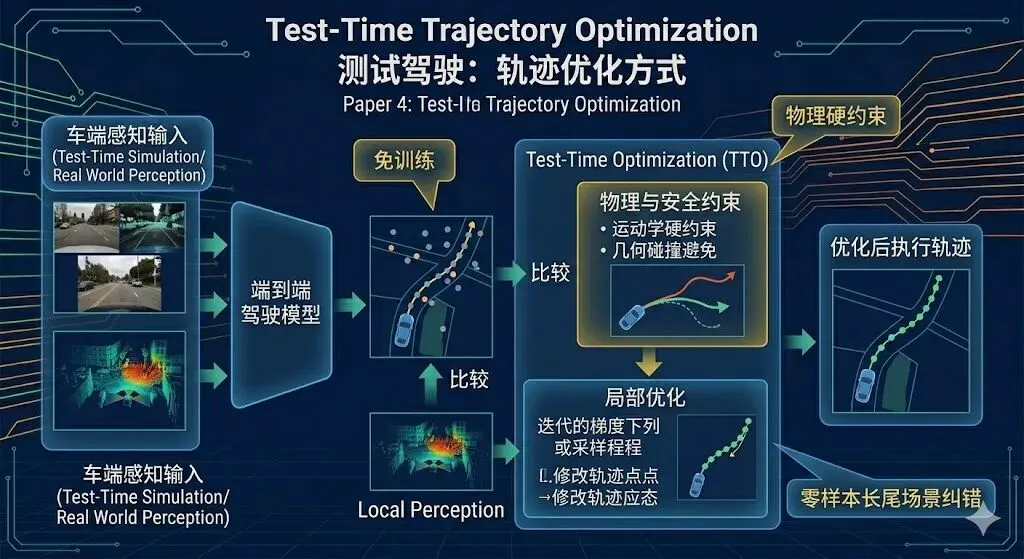
论文针对端到端自动驾驶模型在长尾场景(如突发施工、异形障碍物等)中泛化能力弱的安全痛点,提出了一种创新的测试时轨迹优化(Test-Time Optimization)方法。该系统在无需重新训练或微调基础大模型的前提下,在部署阶段进行实时干预。核心方法包括:1. 实时物理与安全约束层:在端到端模型输出轨迹后,立即接入一层轻量化的运动学与几何碰撞约束检验。2. 测试时即时优化(TTO):根据车辆当前传感器捕获的最新局部环境,通过梯度下降或采样技术,在线秒级微调端到端模型预测的轨迹点。3. 长尾长周期鲁棒机制:通过在推理阶段动态修正偏差,阻止端到端模型的“幻觉”或长尾长尾场景下的错误决策向后传递。在复杂长尾城市场景数据集上,该方法使端到端模型的碰撞率降低了 40% 以上,L2 轨迹误差显著减小;在面对从未见过的异形路障时,系统的接管率大幅下降,且额外增加的计算延迟控制在车载芯片可接受的毫秒级内。1. 提出免训练的自动驾驶测试时轨迹优化范式,即插即用。2. 在推理阶段显式引入物理、几何硬约束,打破端到端的“全黑盒”局限。3. 针对未见长尾场景具备极强的零样本(Zero-shot)在线纠错能力。该技术完美契合当前纯视觉端到端方案在 L4 级长尾安全上遭遇的瓶颈(如特斯拉 Robotaxi 的长尾运营困境)。它不需要车企耗费巨额算力重新训练大模型,而是作为一道低成本、高可靠的“车端实时安全卫士”部署。不仅适用于纯视觉路线,也能广泛赋能各类多模态端到端智驾系统的安全兜底。论文5:A Unified Explainable Autonomous Driving Framework via Cross-Attention Scene Selection and Semantic–Object Fusion论文针对自动驾驶大模型“黑盒”特性导致的不可解释性与监管合规难题,提出了一种基于 Swin Transformer 的统一可解释自动驾驶框架。该框架在处理空间 Token 时,能够一边进行车辆行为预测,一边同步输出以人为本的决策解释。核心方法包括:1. 交叉注意力场景选择(CASS):利用交叉注意力机制自动聚焦并筛选出对当前驾驶决策起决定性作用的核心场景与关键 Token。2. 语义-目标融合(SOF):将高层语义特征与显式三维物理目标进行多模态融合,建立从感知到决策的清晰因果逻辑链。3. 双路同步输出机制:模型在输出底层控制行为(如转向、加速度)的同时,通过自然语言或显式注意力图谱输出其“为什么要这么做”的逻辑解释。该框架在真实复杂路况评测中,决策解释的准确性与人类驾驶员的直觉契合度高达 85% 以上;同时,由于场景选择机制减弱了冗余信息干扰,其行为预测的控制精度和安全性指标也优于传统纯黑盒端到端模型。1. 统一的行为预测与“以人为本”决策解释联合训练框架。2. 基于交叉注意力的关键场景自动筛选与 Token 聚焦技术。3. 兼顾高阶智驾的端到端控制精度与透明可追溯的可解释性。在我国即将实施的 L3/L4 强制性国标背景下,法规明确要求车企必须提供详细的使用说明并确保系统安全可控。该论文的技术为端到端模型合规化提供了关键解法。通过输出可理解的决策逻辑,不仅能提升车主对高阶智驾的信任度(高接纳率),更能在发生长尾长尾事故时,为车企和监管提供清晰的安全追溯与责任问责依据。参考文献
Xu X, Liang A, Liu Y, et al. U4D: Uncertainty-Aware 4D World Modeling from LiDAR Sequences. CVPR 2026 Highlight.
Liang A, Kong L, Yan T, et al. WorldLens: Full-Spectrum Evaluations of Driving World Models in Real World. CVPR 2026 Oral.
小鹏汽车x 北京大学. FastDriveVLA: Efficient Visual Token Pruning for Autonomous Driving. AAAI 2026.
NVIDIA. Alpamayo 2 Super: 32B Parameter Reasoning VLA Model for L4 Robotaxi. GTC Taipei 2026.
Xu Y. Test-Time Trajectory Optimization for Autonomous Driving. arXiv, 2026.
MDPI. A Unified Explainable Autonomous Driving Framework via Cross-Attention Scene Selection and Semantic–Object Fusion. MDPI, 2026.工信部. 智能网联汽车自动驾驶系统安全要求(强制性国家标准报批稿). 2026年6月.
彭博社. 特斯拉Robotaxi车队运营现状报道. 2026年6月12日.
小鹏汽车. CVPR 2026世界模型技术图谱演讲. 2026年6月6日.
华为. 乾崑智驾ADS 5 WEWA 2.0架构技术白皮书. 2026年4月.

 10个月宝宝每天需要喝多少奶粉?
10个月宝宝每天需要喝多少奶粉?
