说实话,这些年我也算是跟汽车打了个照面,特别是在新能源领域。带着老婆孩子出门,咱们奶爸对车的实用性还是有一套的。
这车开得多了,越发觉得:买车,花钱一定得花在刀刃上,尤其自动驾驶这块,价格跟体验差距特别大。我这人向来反对被营销忽悠,今天就来给大家仔细聊聊特斯拉的纯视觉自动驾驶方案,别光看别人盯着激光雷达,特斯拉为什么反其道而行,靠摄像头和AI解决一切。
01.
纯视觉方案的核心逻辑:摄像头 + 神经网络 = “人眼+大脑”
大家都知道现在大多数自动驾驶车企喜欢用激光雷达加摄像头,激光雷达像个尺子,主动发射激光测距,空间感强又准。正儿八经测距离,直接给你前方物体的准确距离。但特斯拉偏偏没用激光雷达,靠的全是摄像头。你说巧不巧?
马斯克的观点是,“人类开车靠的是眼睛和生物神经网络,机器自动驾驶对应就是摄像头和硅基神经网络。”它让车的眼睛变成摄像头,让AI变成大脑,识别前车行人、红绿灯甚至路面车道线。
!特斯拉车队在山间行驶,画面配有视觉方案原理探究标题。
这逻辑其实挺有意思:摄像头只是拍二维画面,对车来说最开始就是一堆“照片”,问题来了——摄像头不测距离,它根本不知道前车离你是10米还是50米。怎么办?通过AI神经网络借助物体大小、视角变换多摄像头融合推断空间距离。
02.
从“看见”到“理解”,技术大升级的秘密武器
说好听点,摄像头就是车的眼睛;说难听点,就是个二维图像采集工具。这个阶段最大难题就是让AI把平面图像转换成车辆能理解的三维环境。
这就延伸出“BEV鸟瞰视角”技术:特斯拉用车前后左右多个摄像头采集的画面融合,拼接出一张动态环境地图,类似上帝视角,能清楚知道左边有没有车,右后方有没有电动车,前方路口在哪。
 特斯拉Model
Y在山间公路行驶。
特斯拉Model
Y在山间公路行驶。
 多视角摄像头合成的道路环境理解图。
多视角摄像头合成的道路环境理解图。
 特斯拉BEV鸟瞰视角感知的动态地图。
特斯拉BEV鸟瞰视角感知的动态地图。
再说句良心话,路上啥都可能遇到:一块轮胎、一个施工板、树枝伸出来啥的,这时候光靠识别“这是轮胎”还不够,特斯拉用的Occupancy概念——判断空间有没有被占用,不用先搞清楚是什么,只知道这地方“走不了”。这个设计真的是没谁了,避免了过度依赖物体识别带来的误判。
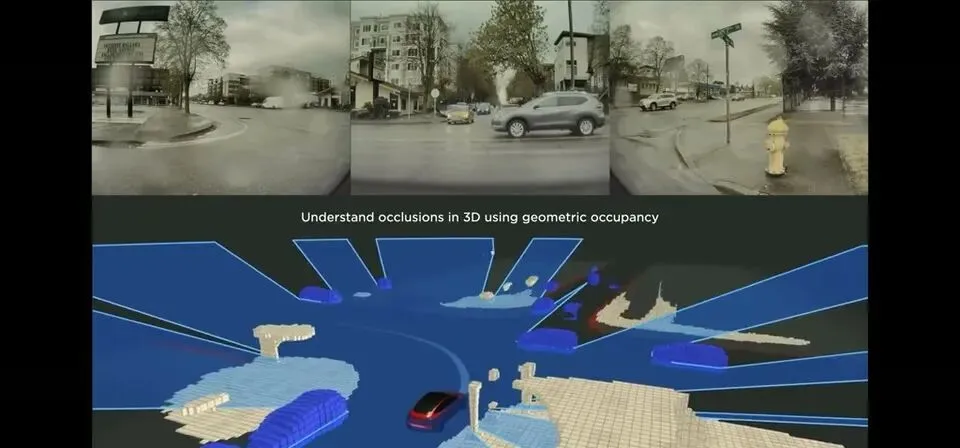 Occupancy占用网络识别出的空间占用情况。
Occupancy占用网络识别出的空间占用情况。
03.
端到端AI:从规则驾驶到数据驱动
大家谈自动驾驶,之前听得多的是模块化系统:先感知、再识别、然后规划,最后执行。
但特斯拉最近搞得比较激进,采用端到端神经网络。这不单让神经网络“看见”世界,更让它直接“学会开车”。怎么学?通过海量的真实驾驶数据视频,AI自己从中琢磨人类司机在复杂路况下的决策。
 AI学习人类司机在复杂路口的驾驶选择。
AI学习人类司机在复杂路口的驾驶选择。
说白了,不再是工程师糊里糊涂写一堆规则,而是让AI自己慢慢琢磨,遇到红灯停,遇到前车减速跟随,遇到合适时机变道……你说这成立不成立?
对于咱们这种实用主义者来说,这点我是服气的。让自动驾驶有了点“灵性”,而不只是机械执行写死的程序。
04.
可完美应对极端天气?视觉方案也有短板
不过话又说回来,摄像头遇到恶劣天气可真考验。暴雨、雾天、强逆光、污渍堵镜头,这些情况对于AI算法的要求爆炸高。
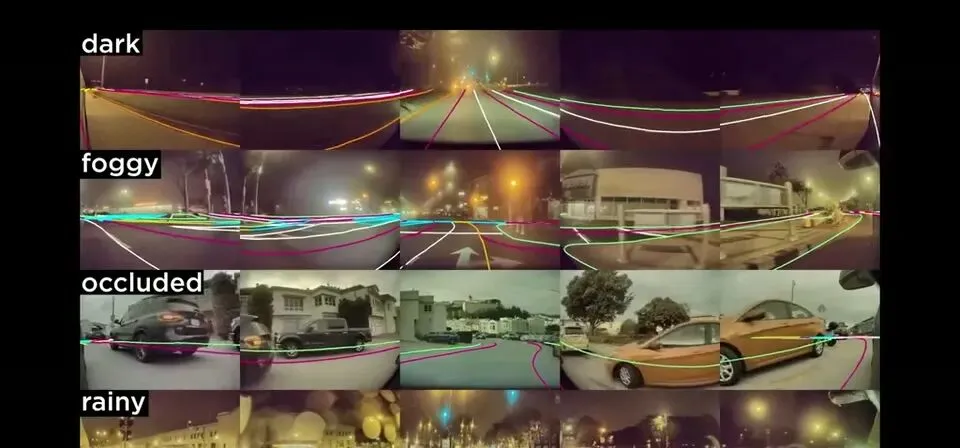 视觉方案在不同恶劣天气下的画面处理对比。
视觉方案在不同恶劣天气下的画面处理对比。
这就是为什么视觉方案虽然看似漂亮、技术先进,但实际应用环境复杂,短板不可忽视。毕竟,奶爸带娃上街路面情况千变万化,安全第一啊!
05.
老王的总结:理性看待特斯拉的视觉自动驾驶
说句真心话,特斯拉的纯视觉自动驾驶敢于放弃被多数企业视为“标配”的激光雷达,选择以摄像头+神经网络来解析世界,确实是笔大赌注。
简单来说,就是用AI的大脑把车的“眼睛”拍来的图片拼成一副动态立体地图,靠推测代替物理测距。
这套方案的优势在于成本更低(激光雷达动辄几万块),技术路线更接近人类驾驶直觉,更新迭代更快。但同时,对于复杂光线和恶劣天气环境的适应能力也更依赖算法和数据积累。
带着老婆孩子出门的我,当然希望技术越来越成熟,毕竟安全和稳定才是咱们奶爸的头等大事。话说回来,支持技术进步,但记住别被营销忽悠了!买这车花钱得花在刀刃上。
 中控屏显示车辆正在进行自动驾驶路径规划。
中控屏显示车辆正在进行自动驾驶路径规划。
大家觉得呢?欢迎车友们留言交流,我这只是个人角度,可能每个人需求不一样,咱们一起探讨探讨!
版权声明
本文由老王汽车评测原创,欢迎分享,转载请注明出处。

