看不见的手:新智驾强标为什么"不提硬件",却把纯视觉路线堵得死死的
一、最聪明的监管,从来不下场吵架
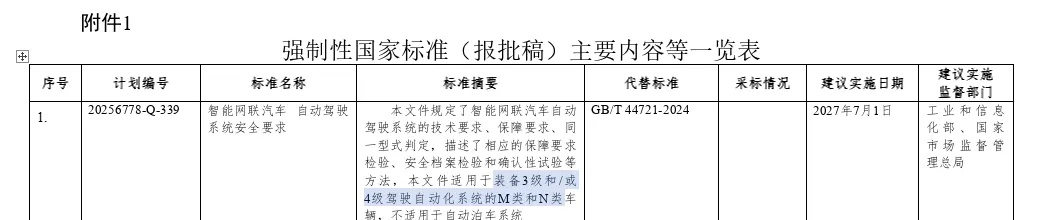
2026年6月17日,工信部官网挂出了《智能网联汽车自动驾驶系统安全要求》强制性国家标准的报批稿,公示期一周,拟实施日期定在2027年7月1日。
这份文件的意义很简单也很重——它是中国第一部专门针对L3有条件自动驾驶和L4高度自动驾驶的强制性准入标准,管的是生死线:达不到,车型公告都进不去,更别说上路拿牌照。
但如果你打开这份报批稿的目录和正文摘要,会发现一件很有意思的事:通篇找不到"必须装激光雷达"或"禁止纯视觉"这几个字。它写的全是性能指标、ODD(设计运行域)边界、故障降级策略、数据记录、安全档案、确认性试验方法。
然后行业里所有人都心知肚明:纯视觉方案基本上告别了L3/L4准入资格。
这不是矛盾,这是顶级的政策设计——它不跟你吵技术路线,它把尺子递给你,让你自己去量,量出来不合格,没人需要替你尴尬。
二、"不点名硬件"背后的工程哲学
先说清楚一件事:标准不写硬件清单,不是因为专家不知道硬件的事,恰恰是因为他们太知道了。
国家标准制定有一条铁律——不能替市场做采购决策。如果你白纸黑字写"L3必须配激光雷达",那等于变相指定了供应商路线,会招来反垄断质疑、供应链游说、以及无数篇"保护传统利益集团"的檄文。但如果写的是物理规律和性能指标,那就无可争议——因为牛顿不收任何人的游说费。
所以这份强标走的是另一条路:用"可验证的性能底线"和"安全论证的方法论"来设卡,让单一传感器的物理天花板自己成为淘汰机制。
几个关键维度的条款指向同一件事:
1、全天候ODD的硬性边界
标准强制要求车企完整公示设计运行域的每一个维度——光照(白天/夜间/逆光/隧道进出)、气象(小雨/暴雨/轻雾/浓雾能见度分级)、路面(干燥/积水/结冰)、标线完整度……并且明确规定:能见度<50米浓雾、特大暴雨属于ODD外场景,系统不得维持完整自动驾驶控制。
注意这里的精妙之处——它不是说"你的摄像头不行",它说"如果你的系统在这些条件下还想保持控制,你必须证明你能稳定感知"。摄像头在浓雾里的散射衰减是电磁波物理,不是算法能迭代掉的。
2、感知冗余的"异构"隐含要求
正文第5章对感知系统的安全要求,以及附录B(高快速路L3专项)、附录C(全域L4专项)共同构成的逻辑是:当一种传感器因环境因素失效时,系统必须能通过另一种不同物理原理的传感器维持安全运行。
摄像头是被动光学成像,依赖环境光反射;毫米波雷达是主动电磁波发射,利用多普勒效应测距测速,天生全天候;激光雷达是主动激光测距,输出确定的三维几何点云。三者原理异构,互为备份。
纯视觉方案的问题不在于"摄像头不够聪明",而在于七个摄像头的底层输入都来自同一个物理通道——光学成像。镜头被泥污糊住、逆光过曝、暴雨水幕遮挡、浓雾散射……所有摄像头会同时退化。这不是"模型没训练好"的长尾问题,这是单点失效结构,违背功能安全的基本冗余原则。
3、安全档案+确认性试验=举证责任倒置
这可能是整份文件最狠的一刀。标准要求车企建立完整的ADS安全档案,全生命周期记录系统运行、故障、接管、碰撞数据,随车留存至报废,监管部门可调取核验。确认性试验也不是跑几圈封闭场地那么简单——它要求的是一套可审计的论证体系:你得证明你在所有声明ODD内是安全的,而不是证明你通过了某几个预设场景。
纯视觉想过关,举证责任全在自己身上。你想声称"我不需要毫米波雷达",行,那你把暴雨、浓雾、逆光、低对比度非标障碍物(白色卡车融进天空那种经典case)的感知置信度、测距精度、故障降级时序——全部用数学和试验数据钉死。这笔验证成本本身就会让车企算完账默默去下单买雷达。
三、纯视觉的"物理天花板":不是算法不够好,是光不够用
马斯克那句名言——在物理层面上,用激光雷达造出来的车,不可能比不用激光雷达的车更安全。——在传播上很漂亮,但在工程层面经不起推敲。
核心问题就一句:摄像头是被动传感器,它只能接收已经存在的光。
暴雨天:雨滴和水幕对可见光的散射造成图像对比度断崖下跌,画面变成噪点丛林。特斯拉自己的工程团队清楚这一点——这就是为什么他们在HW3/HW4时代删掉了毫米波雷达后,FSD在雨雾天的"幽灵刹车"和漏检率一直是最集中的投诉类别。
夜间+低反射物:纯视觉依赖被照射物体反射回来的光强来推断亮度和轮廓。没有主动发光的东西(比如路面上一块深色轮胎皮、穿深色衣服的行人、没贴反光条的农用三轮车),有效探测距离会剧烈收缩。卡内基梅隆大学自动驾驶安全专家菲尔·库普曼等人的研究反复验证了这一点。
逆光/隧道出入口:动态范围挑战。就算HDR再强,物理上限摆在那里——太阳的亮度量级碾压路面一切反光,过曝区域的信息就是丢了,算法只能靠"猜"(预测/插值),而L3/L4不允许用"猜"来承担法律责任。
摄像头脏污:泥水、冰雪、虫尸糊住镜头——这在真实用车环境里远比实验室常见。纯视觉方案对此除了"检测到画面模糊了然后降级"之外,没有任何异构手段继续精确测距。毫米波雷达不在乎镜头脏不脏。
Waymo前CEO John Krafcik说得更直白:特斯拉的纯视觉配置"存在严重的视野缺陷",等效分辨率甚至达不到人类驾照体检的视力及格线,而物理层面的感知缺陷无法单靠软件优化解决。
这不是说纯视觉在L2上没用——恰恰相反,特斯拉把L2级视觉辅助驾驶做到了行业顶尖水平。L2和L3之间隔着一道深渊:L2出错,法律默认是人负责;L3出错,系统承担动态驾驶任务,监管必须拿到确定性保证。而这个保证,纯视觉给不了。
四、虚假宣传的温床:把L2卖成"未来",把辅助驾驶叫成"完全自动"
这才是消费者真正该愤怒的地方。
特斯拉在中国的FSD(后来改名为"特斯拉辅助驾驶")定价高达6.4万元,销售话术、车机界面和中控动画长期渲染"点到点自动驾驶""完全自动驾驶能力"的预期,但实际上它从未获得中国监管部门的L3及以上准入,本质上就是L2级驾驶员监督系统。
北京大兴法院近期审理的十位车主集体诉讼案,核心指控就是:特斯拉在明知功能未获批的情况下,仍以"完全自动驾驶"名义销售,构成误导。42%的电动车买家曾把"L4潜力"当购买参考因素——这个数字本身就说明了营销叙事的力量。
更讽刺的是,2025年7月工信部新规已明确要求未通过认证的功能不得标注"完全自动驾驶",特斯拉中国官网一度悄悄完成更名(FSD→辅助驾驶),但线下渠道和销售话术的惯性远大于线上文案。
而行业的普遍做法是:小鹏、华为、蔚来等在宣传中明确"需随时接管""驾驶员全程负责",把责任边界写清楚。特斯拉的策略则一直是法律上说L2、营销上暗示L4、付费功能名叫"FullSelf-Driving"——三个叙事层彼此矛盾,但恰好落在过去监管灰度区的缝隙里。
新的强标一旦在2027年落地,这套玩法就玩不下去了。因为标准直接把L3/L4的准入门槛焊死在安全论证和硬件冗余上——你可以继续叫辅助驾驶,但你再也不能用"马上就能升L3"当卖点去卖6万多的软件包,除非你真的把异构冗余硬件装上、跑通全部确认性试验、拿到工信部公告。否则就是白纸黑字的虚假宣传。
五、结语:物理规律是最公正的监管者
回头看这份强标最精妙的设计——
它没有封杀任何技术路线,没有点名任何供应商,甚至措辞上保持了最大限度的"技术中立"。但它用性能指标、ODD透明度、冗余论证、安全档案、数据黑匣子这几根柱子,搭出了一个框架:你想进来,就拿证据说话。
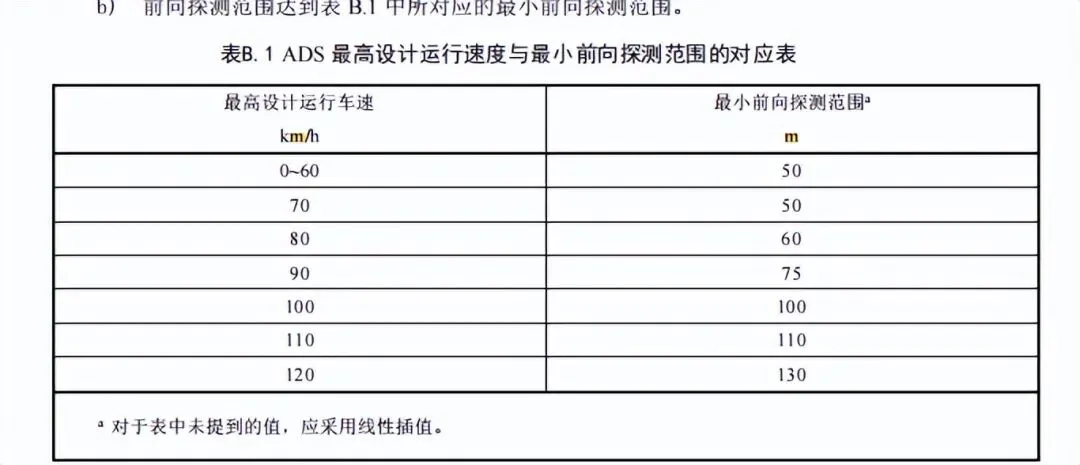
证据的物理基础是什么?是摄像头在暴雨里看不到130米外的静止车辆,是神经网络的"我觉得那里没车"在法律上不能等价于"系统已确认安全"。
所以不是专家"针对"纯视觉——是光学的物理天花板自己把门关上的。而监管的智慧在于:不用亲自关门,只要在门框上焊一条硬尺,让大家看清楚谁跨不过去。
这对消费者是好事。买车的人不懂什么BEV(鸟瞰图)特征提取或Transformer注意力机制,但他们懂一个朴素的道理:大雾天开120码,车得看得见前面有什么。新标把这层朴素的安全诉求,翻译成了车企无法绕开的合规语言。至于那些靠模糊宣传赚溢价的日子——门在关上了。

(本文基于工信部2026年6月公示的《智能网联汽车自动驾驶系统安全要求》强制性国家标准报批稿公开信息及相关行业分析撰写,具体条款以国标委最终发布的正式文本为准。)
 10个月宝宝每天需要喝多少奶粉?
10个月宝宝每天需要喝多少奶粉?
