L5级自动驾驶畅想:车路云星一体化
- 2026-06-21 23:30:19
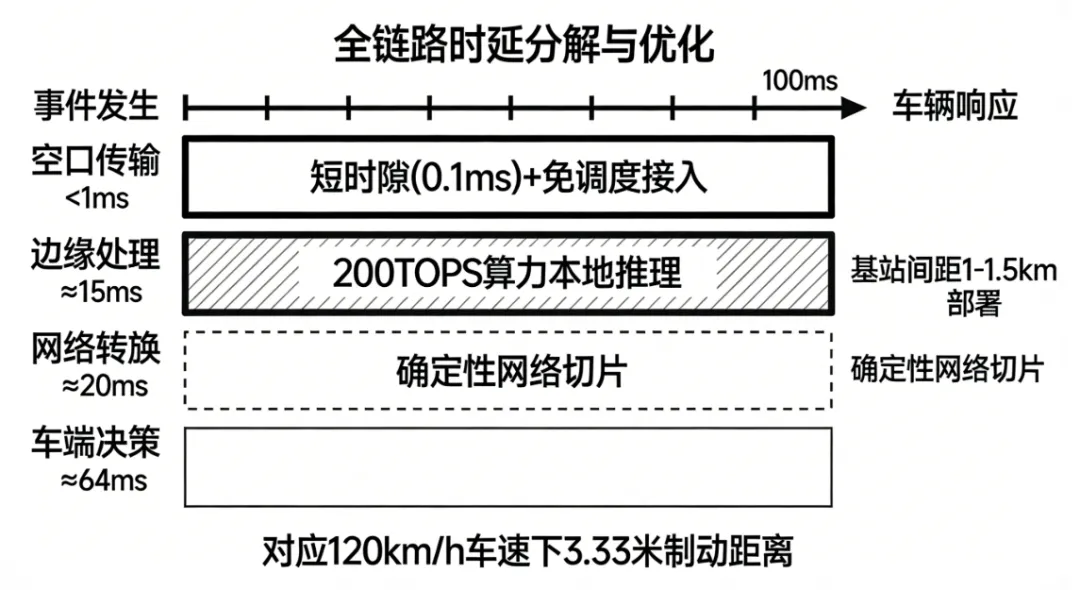
2026年1月16日,官方披露红旗汽车6G车路云星一体化进展,超视距感知与低时延突破。作为深耕车联网领域多年的开发者,我认为新闻报道的2公里超视距感知、≤100ms端到端时延指标如果能够实现,那“网络赋能自动驾驶”的技术路线是非常可行的。从开发视角看,120km/h车速下100ms对应3.33米行驶距离,是紧急制动的安全临界值;2公里感知可预留40秒预警窗口,这正是单车智能难以突破的物理瓶颈,如果上述技术能够常态化普及,这些问题将不再是问题,接下来我将基于这提出自己的一点设计思路。

重构感知边界
该路测的6G通感一体化核心技术,与我之前提到的的“突破车载感知边界”诉求高度契合。传统车载传感器感知半径仅200-300米,复杂工况故障率超30%,而6G基站依托100GHz+带宽毫米波信号,耦合大规模MIMO技术生成三维点云,可将单基站感知半径拓展至1公里。结合山区项目经验,我认为低轨卫星中继是无光纤区域网络覆盖的最优解,“基站+卫星”架构能破解单一路径感知盲区,为多源数据融合筑牢基础。
这对消费者而言,意味着出行安全的本质升级:雨天过弯无需顾虑视线遮挡,高速行驶可提前预警2公里外风险,突发状况下驾驶员能获得充足反应时间,自动驾驶从“辅助”向“可靠”跨越,虽然目前6G还没普及,尽管可能会增加购车成本。
打破时延瓶颈
时延低于100ms时延的实现,核心在于全链路优化,这也是我过往项目的攻坚重点。基于实践,我确定“星-云-边-端”四级架构为最优路径:空口层通过0.1ms短时隙与免调度接入,将传输时延压至1ms内;边缘节点下沉至路侧,单节点集成200TOPS+AI算力,实现点云数据本地化处理,规避带宽拥堵。首批100个基站按1-1.5公里间距部署,是我结合落地经验判断的合理密度,既能保障感知连续,又能控制初期成本。
核心技术适配
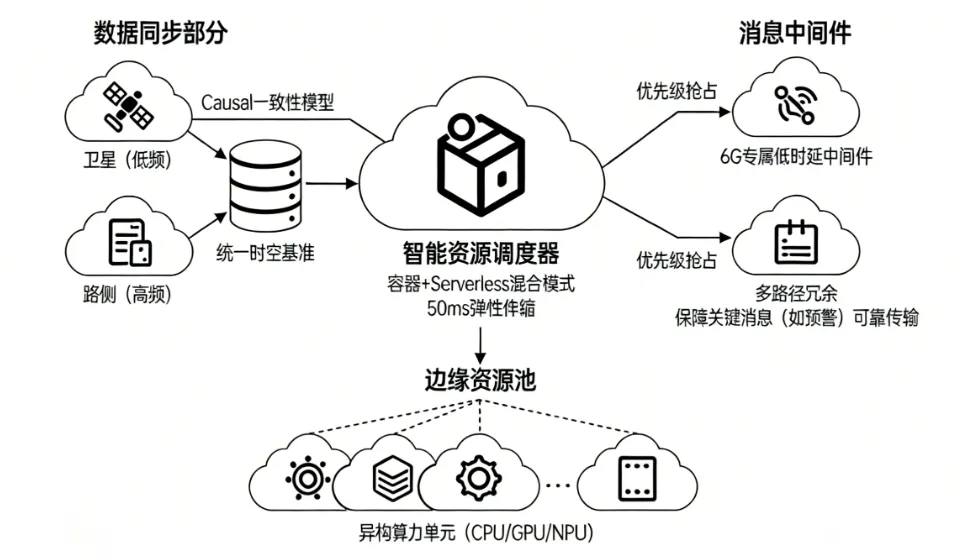
云平台迭代是系统落地的关键,结合云边协同项目经验,我提出三大核心升级方案:一是“容器+Serverless”调度,50ms内完成算法弹性部署,适配毫秒级伸缩需求;二是基于Causal一致性模型构建同步机制,解决卫星与路侧数据时空差,避免决策失效;三是自研6G专属中间件,通过信道抢占技术,将安全消息误码率控制在10⁻⁹以下,保障核心场景可靠运行。
系统落地方案
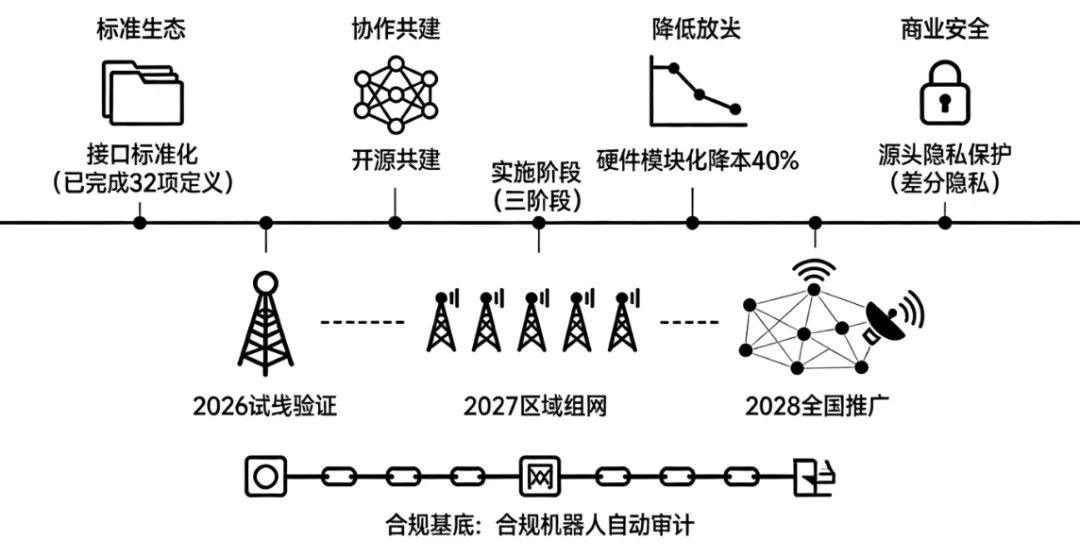
规避“重技术、轻落地”误区,我梳理出“一体两翼三阶段”实操方案。“一体”以通感一体智能交通CPS为核心;“两翼”推进接口标准化与生态共建,我参与的工作组已完成32项核心接口定义,破解设备兼容难题;“三阶段”分三年落地,2026年试点验证,2027年区域组网,2028年全国推广。硬件模块化设计可降低40%初期投资,是破解资金压力的关键路径。
安全合规是前提,基于数据安全项目经验,我建议构建源头防护体系:感知端集成匿名化单元,通过差分隐私技术保护用户轨迹;云平台部署合规机器人,自动审计数据流转,契合《个人信息保护法》,规避后期整改成本。
最后,针对此次路测总结一下吧。对于企业,这次路测可以说是为自动驾驶指明了“网络赋能”赛道;对开发者而言,需从设备开发转向系统级设计,聚焦通感协同等核心痛点。我的基于上述新闻设计的这套方案,既能承接技术突破红利,又能破解规模化落地难题,最终为消费者构建“可信任、高可靠”的全自动驾驶体验。关注我,后续继续介绍车联网最新新闻和业务逻辑。
#自动驾驶 #车联网 #6G同感一体 #6G #车路云星协同 #低时延通信 #边缘计算 #L5自动驾驶 #智慧交通CPS

