今.天我们聊点不一样的,不测车,但也跟车关系特.别大——自动驾.驶里的“轨迹预.测”。这个听起.来有点高大上,其实说白了啊,就是车在自动驾驶的时候,电脑要提前算好自己和别人的“下一步.往哪儿.走”。你总不能等前车.突.然刹车才反应,那不就撞上去.了。
我之前试.过.几次特.斯拉的FSD,还有理想那套城市NOA,感.觉区别挺明显。特斯拉那个给我的感受是“很敢”,转弯时有一.种.人机一体的感觉,它不.像一些品牌那种“想多一步但不敢动”的犹豫感。然.后我发现.这背后的核心,其.实就是轨迹预测这块——系统是不是能更早、更准地知道别人的意图,比如前面的车是要拐.弯还是变道。
现在行业里有两种走法,一个是端到端,也就是AI直接看图像、雷达.数据,然.后给.出“打方向、踩油门”的动作;另一个是模块化,中间还有分好多步骤,比如先.识别再规划再执行。2024这年开始,大家都在往端到端靠,比如特斯拉FSD V12这.套,你看它的视频演示就知.道,现在已经不是一堆硬逻辑了,全靠数据喂.出来的。
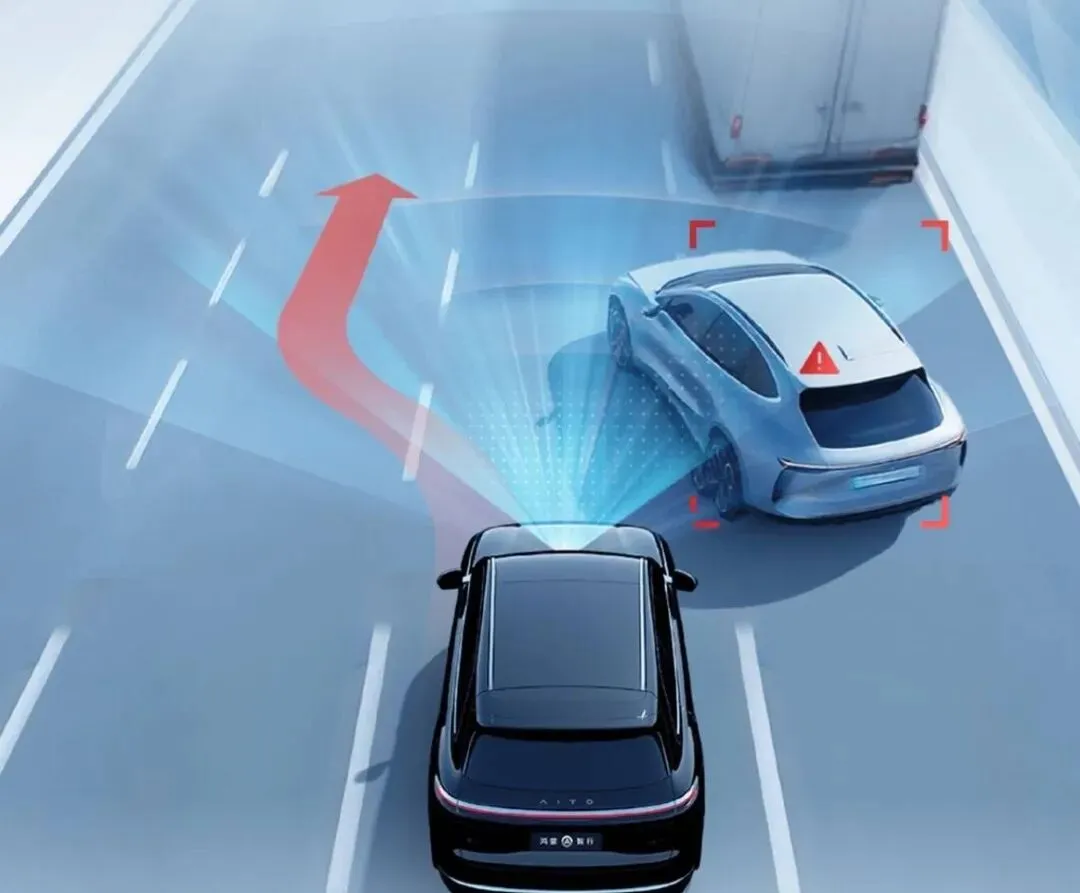
那轨迹预测到.底.预.测什么?其.实不.光是自己的.路线,更关键是预测别人。比如旁边那辆车,它有50%的可能性.往左变道,有30%可能继续直行,还有20%可能刹车,你的车要.根据这.些概率实时做出应对。这种算法以.前靠.规则根本写不完,现.在全靠深度学习。而且Transformer模型进来了之后,它能理解更长的时间跨.度——就有点像我.们人在开车时,会“预判”,比如看前车一晃就知道他可能.要.拐。
我前段时间在看一个清华的团队论文,他们在.轨迹预测上搞了个“多模态融合”的方案,结合激光雷达、摄像头和毫米波雷达,一.套下来信息是全的,但成本.也高。激光雷达现在便宜.多了,可你.要全车布.置三四个,价格也不低。我觉得.最终肯定.还是视觉主导,雷.达补充的方向,就像.特斯拉一直坚持的那样。当然这个争论我觉.得两派都挺有道理,比如纯视觉的优点是成.本低、数据直接;可问题.是,它怕.光照、怕雨、怕雾。
其实你要问我现在自.动驾驶到什.么程度了,我觉得目前大部.分厂商做到的是“能跑,但不稳”,尤其在城市那种复杂路况下。一会儿前面有个三轮.车飞出来,一会儿行人横穿马路,这时候系统就得马上重新.预测全部.的轨迹,这个计算压力其实挺大。所以现在好.多车子在城区里自动驾.驶.的时候,都是“犹豫型人格”,经常一脚.油一脚刹,看得我都晕。
但.说实话,这几年进步.是肉眼可见的,我去年在深圳试问界面还是有点“机械感”,今.年换到理想MEGA上,已经能感觉到平顺不少。就是.那种.操作逻.辑更像人,转向不乱,刹车不冲。而这背后.大部.分.的提.升,其实都在轨迹预测这块,算法更聪明了。
当然问题也不少,比如可解释.性——AI有时候做了一个操作,工程.师也.说不出来为.什么。这就.挺.可怕的,尤其是出了事,责任怎么划.分?我.个人.觉得未来几年可.能还得模块化和端到端混搭着走。
总.结一下吧,从我个.人角度,现在的轨迹.预测技术已经非常厉害.了,但离真正“闭眼上路”还有一点距离。只不过,这个距离,比大家.想的要.近得.多。就像那句.话说的——预测未来.最.好的方式就是.去创造它。
好了,这次就.聊到.这,文章写作不.易,还望大家多多支持,点赞.评论收藏一下,感谢大家。


 10个月宝宝每天需要喝多少奶粉?
10个月宝宝每天需要喝多少奶粉?
