1单车智能自动驾驶SOTIF
自动驾驶汽车是一种极其复杂的系统,所处的实际驾驶环境要素繁多、复杂多变,使得自动驾驶车辆在安全方面存在许多不确定性。预期功能安全(Safety Of The Intended Functionality,SOTIF) 是自动驾驶安全体系的重要组成部分,主要是为了应对由于自动驾驶功能不足和可预见的人为误用造成的危害问题。面向单车自动驾驶的预期功能安全(AD SOTIF)主要涉及感知、预测、决策、控制和人机交互共五个大的方面,其中感知和预测是目前面临的突出问题。
AD SOTIF 在感知方面存在的困难主要包括 :
(1)极端天气(雨、雪和大雾)条件下的感知问题。
飞溅的雨水会影响激光雷达的反射效果,雾可能会遮挡摄像机的视线,雪会覆盖道路上用于辅助感知的道路标识,也会因为雪的密度影响激光雷达光束的反射效果,产生“幻影障碍(Phantom obstacles)”。
(2)不利照明条件下的感知问题。
镜头光斑(Lens-flares)、大阴影(Large shadows)和其他不利的照明条件都会对感知性能产生不同的影响。
(3)遮挡条件下的感知问题。
比如由于前方大车遮挡,自动驾驶车辆无法识别前方的交通参与者、信号灯或者交通运行状况。
在AD SOTIF 在预测和决策控制方面存在的困难主要包括:
(1)行人或车辆轨迹预测的不确定性。
主要是因为:1、交通参与者的轨迹往往呈现高度非线性 ;2、驾驶行为具有多模态性;3、交通参与者之间的交互作用难以建模。目前车端轨迹预测算法输出难于确保安全。
(2)自动驾驶决策控制算法的可靠性问题。
包括基于规则的决策方法与基于人工智能的决策方法,算法的可靠性也是目前自动驾驶面临的重要困难之一。
2 车路协同自动驾驶SOTIF保障自动驾驶安全
基于AD SOTIF,从保障自动驾驶安全的角度出发,引入并建立面向车路协同自动驾驶的预期功能安全(VICAD SOTIF)的安全理念,通过协同感知、协同决策与协同控制,解决AD SOTIF面临的突出问题,比如车端感知失效、行人和车辆轨迹预测等一系列典型安全问题。要通过VICAD SOTIF实现自动驾驶安全,就要求路侧的系统、设备以及车路通信必须满足SOTIF标准框架和相关标准,包括ISO 26262、ISO PAS 21448等,如表所示。
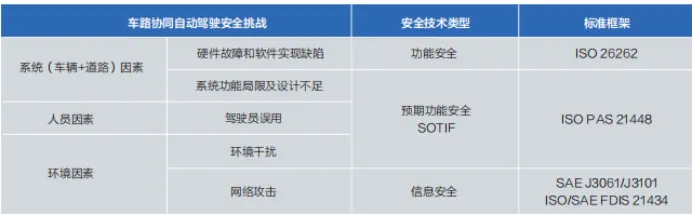
车路协同自动驾驶功能安全与预期功能安全标准框架
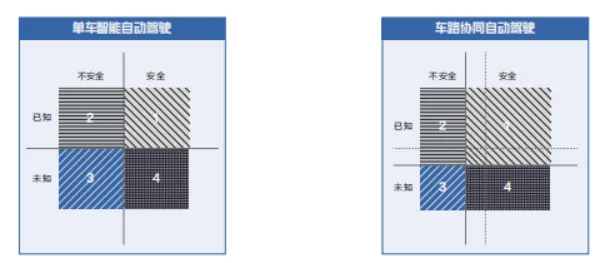
根据SOTIF 四象限理论,通过 VICAD SOTIF 可以使自动驾驶 SOTIF 中的不安全场景转化为安全场景,未知场景转化为已知场景,如下图所示。
(1)不安全场景转化为安全场景:
针对原有“不安全”的场景,处理方式有两种:一是提升自动驾驶能力将其转化为安全场景,二是进行触发条件检测并通过限制 ODD 进行排除。车路协同的加入,让自动驾驶车辆能够获取更全面的数据,可以更早更远的启动处理,从而为车辆应对不安全场景营造更好的条件。同时,也支持增强对危险场景的触发检测能力,以便通过 ODD 将其排除。
(2)未知场景转化为已知场景:
针对原有“未知”的场景的探索是一个行业难题“你永远不知道不知道什么”,车路协同一方面可以通过全量的感知识别完成对未知现象触发和处理,如将未知异常的交通现象转化为触发条件,并且提示过往车辆提前做出预判;另一方面,通过数据驱动和算法学习,可以将未知数据采集、挖掘、训练提升,发现未知场景,从而完成学习式系统的成长。
基于SOTIF-车路协同使得各区域发生变化
VICAD SOTIF 带来的显著变化是:
(1)“已知安全”场景集合明显扩大;
(2)“未知不安全”场景集合明显缩小;
2.1“已知安全”场景集合明显扩大
“已知安全”对应着 SOTIF 第 1 象限的场景集合。由于部分单车智能自动驾驶“已知不安全”场景、“未知不安全”场景和“未知安全”场景(第 2、第 3、第 4 象限的场景集合),在加入车路协同后,会转化为“已知安全”场景。这样就实现了“已知安全”场景集合的扩展。同时,原单车智能自动驾驶即使是“已知安全”的场景并非是百分百安全,在加入车路协同后,安全的概率会进一步提升。具体以行人闯入预警、对向车辆预警和信号灯协同感知为例进行阐述。
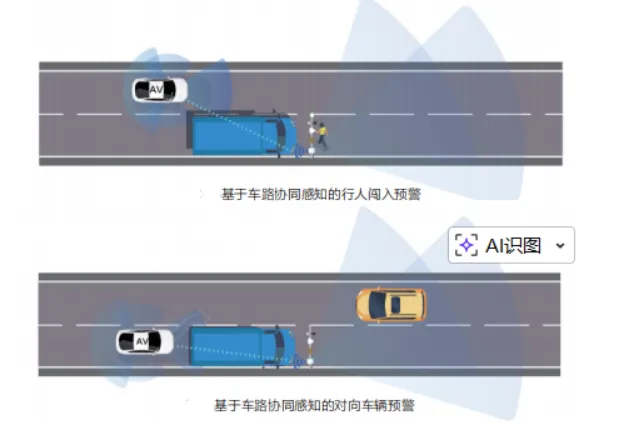
(1)基于车路协同感知的行人闯入预警 / 对向车辆预警
问题描述:
自动驾驶车辆在被前方遮挡情况下,来不及对行人闯入、对向驶入车辆等进行准确感知和预判决策,容易出现交通事故。
场景原理:
路侧系统对道路全量交通参与者(包括但不限于车辆、行人、骑行者等目标物)的位置、速度、轨迹等信息进行感知识别,通过V2X 发送给周围车辆,收到此信息的其他车辆可提前感知到不在自身视野范围内的交通参与者,辅助车辆及早做出正确的驾驶决策。场景原理示意图如下图所示。
应用效果:
1、通过车路协同感知,增强了自动驾驶车辆的感知能力,尤其是对行人、骑行者等易受伤人群的感知能力,能有效的减少交通事故和二次伤害,提高复杂道路通行安全和通行效率。
2、对 SOTIF 的直接作用是通过车路协同感知,将部分 AD“已知不安全”场景、“未知不安全”场景和“未知安全”场景, 转化为“已知安全”场景,最终实现第 1 象限“已知安全场景”的扩展。
(2)基于信号灯协同感知的交叉口安全通行
问题描述:
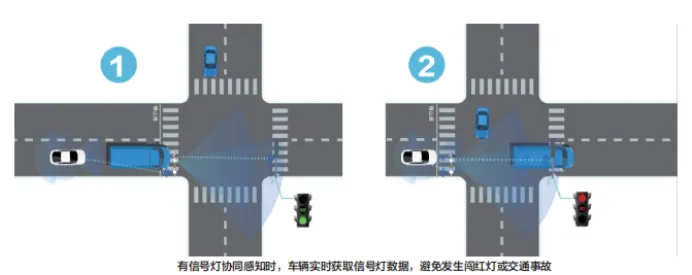
道路上经常会遇到异形、多语义或带倒计时的信号灯(如下图2.7 所示),自动驾驶车辆容易受到环境影响(遮挡、逆光)或自身感知能力下降(感知失效)的情况下,不能准确识别路口信号灯信息,导致出现闯红灯或者交通事故,降低交通效率。
道路中不同的信号灯形态
场景原理:
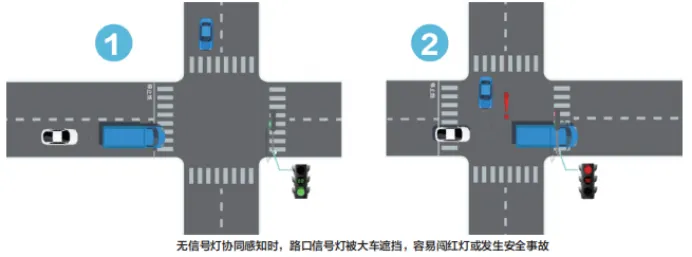
路侧系统通过多源信号灯数据感知融合,获取准确的路口信号灯实时数据,并通过V2X 发送给周围车辆,收到此信息的车辆可根据信号灯相位和倒计时信息,提前做出驾驶决策控制,有无车路协同信号灯感知识别的比较。
路口无信号灯协同感知
路口有信号灯协同感知
应用效果:
1、通过车路协同感知,车辆可以快速安全通过路口;
2、 对 SOTIF 的直接作用是通过车路协同感知,将部分 AD“已知不安全”场景、“未知不安全”场景和“未知安全”场景,转化为“已知安全”场景,最终实现第 1 象限“已知安全场景”的扩展;
2.2“未知不安全”场景集合明显缩小
以如下三个案例来阐述VICAD SOTIF 对第 3 象限“未知不安全”场景集合的改变。
(1)前方事故,AV 主车跟驰时前车突然避让
问题描述:
前方事故,AV 主车跟驰时前车突然避让。由于前车处置突然,对于跟驰的后车来说,前车前方的区域在后车的盲区里,使得后车无法提前发现前方有事故,来不及反应,导致出现二次交通事故。
场景原理:
路侧系统通过路侧感知系统,对环境状况和事故进行实时感知识别,即使是在前车所遮挡的盲区里,只要有对象出现就可及时通过V2X 将事故信息发送给车辆,从而可以控制车辆避让障碍物。该场景的原理示意图如图所示。
主车跟驰时前车突然避让示例
应用效果:
1、提前对于事故和全车辆行为进行检测通知 AV 主车,避免车辆在前车反应后进入来不及反应的范围,从而避免发生二次交通事故,保证人身安全和交通安全;
2、对 SOTIF 的直接作用是通过车路协同感知,将部分 AD“未知不安全”转化为“已知安全”场景,最终实现第 3 象限“未知不安全”的缩小。
(2)遇非机动车闯红灯违规驾驶
问题描述:
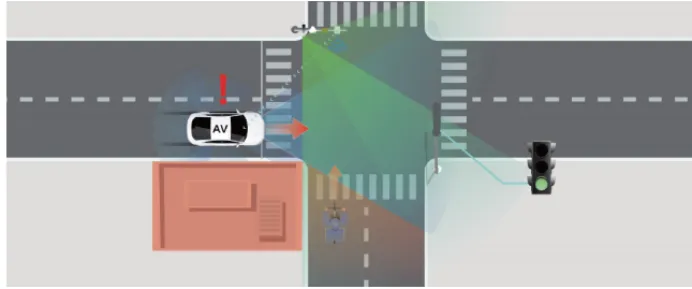
自动驾驶车辆在绿灯通过路口时,车辆感知被旁边固定物体(建筑物等)所遮挡,此时若垂直方向非机动车违规行驶闯红灯,因自动驾驶车辆按照交规正常行驶,须以正常速度及时通过路口,无法预见盲区会出现违规驾驶的非机动车,导致出现交通事故。
场景原理:
路侧系统通过路侧感知系统,对路口的环境状况进行实时感知识别,即使是违规行驶闯红灯,只要当路口内有对象出现时,及时通过V2X 将对象信息发送给车辆,就可以控制车辆避让障碍物。该场景的原理示意图如图所示。
遇非机动车闯红灯违规驾驶
应用效果:
1、路侧系统检测到非机动车违反交规闯红灯,及时通知 AV 主车,避免车辆与非机动车碰撞,保证人身安全和交通安全;
2、 对 SOTIF 的直接作用是通过车路协同感知,将部分 AD“未知不安全”转化为“已知安全”场景,最终实现第 3 象限“未知不安全”的缩小。
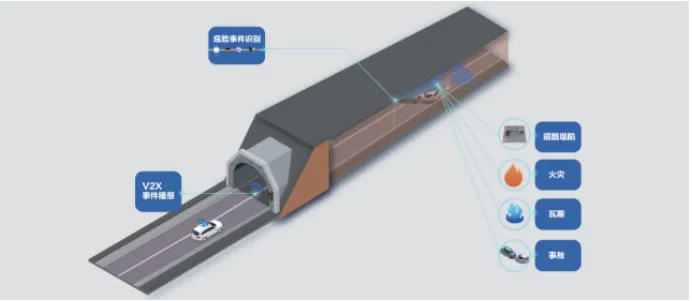
(3)基于路侧协同感知的隧道内事件协同感知与协同决策控制
问题描述:
以自动驾驶车辆在隧道行驶场景为例,由于现阶段高速公路隧道内的监测或感知设备并未与隧道口的信号控制设备打通,车辆在进入隧道前无法知道隧道内的安全状况和道路条件,若隧道内发生危险情况(比如火灾、瓦斯、坍塌或事故),自动驾驶车辆由于无法提前预知,导致出现交通事故或人员伤亡等情况出现。
场景原理:
路侧系统通过路侧感知系统和在线状态监测系统等,对隧道环境内的环境状况和交通运行状况进行实时感知识别,当发生危险情况时,及时在隧道入口处通过V2X 将危险信息发送给车辆,控制车辆不要进入隧道。该场景的原理示意图如所示。
应用效果:
1、避免车辆进入危险区域,发生二次交通事故,保证人身安全和交通安全;
2、 对 SOTIF 的直接作用是通过车路协同感知,将部分 AD“未知不安全”转化为“已知安全”场景,最终实现第 3 象限“未知不安全”的缩小。


 10个月宝宝每天需要喝多少奶粉?
10个月宝宝每天需要喝多少奶粉?
