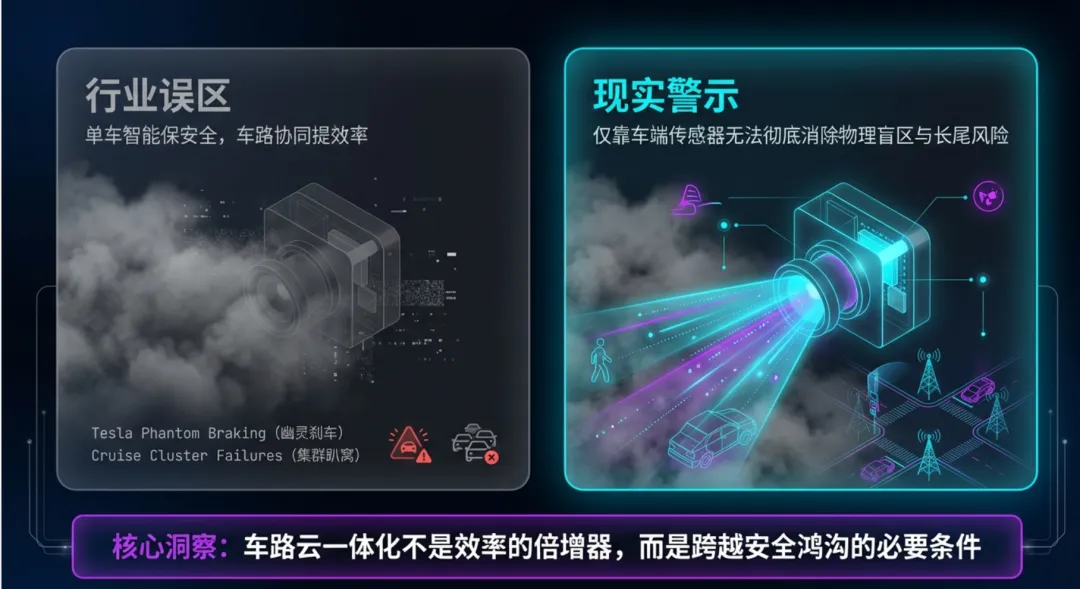
抛出问题:在智能网联汽车(ICV)技术演进的宏大叙事中,行业内长期存在一种颇具误导性的“二元对立”观点:即单车智能负责解决微观的安全问题,而车路云一体化则主要负责解决宏观的效率问题。
在这种认知下,车路协同往往被视为锦上添花的辅助手段——有它更好,没它车也能跑。然而,随着自动驾驶技术步入深水区,特别是L3级以上自动驾驶在复杂城市工况的规模化落地尝试中,现实给了我们一记响亮的耳光。从特斯拉的“幽灵刹车”到Cruise在旧金山的“集群趴窝”,无数实战案例都在警示一个被忽视的真相:仅靠车端的传感器堆叠,无法在物理层面彻底消除感知盲区与长尾风险。
作为交通安全方面的从业者,另外也跟很多同行交流过类似的问题,我个人认识:车路云一体化,不是效率的倍增器,而是自动驾驶跨越安全鸿沟的必要条件,是守住生命底线的系统安全底座。
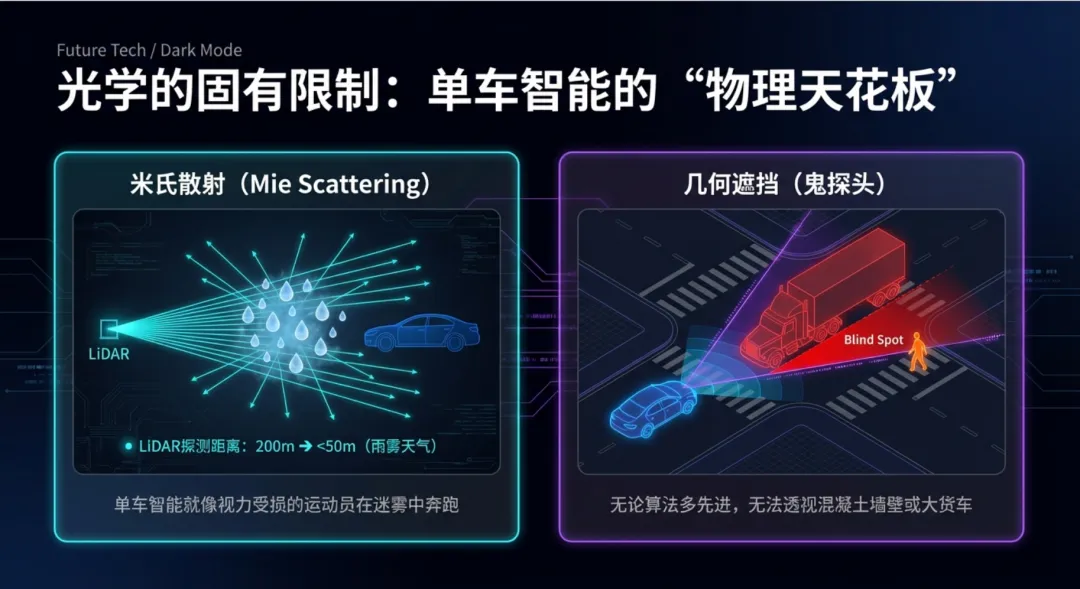
一、 光学的固有限制:单车智能的“物理天花板”
单车智能的核心逻辑是“求诸己”,即通过不断堆叠激光雷达、毫米波雷达和摄像头,试图让车拥有超越人类的感知能力。但遗憾的是,物理定律是公平的,也是残酷的。
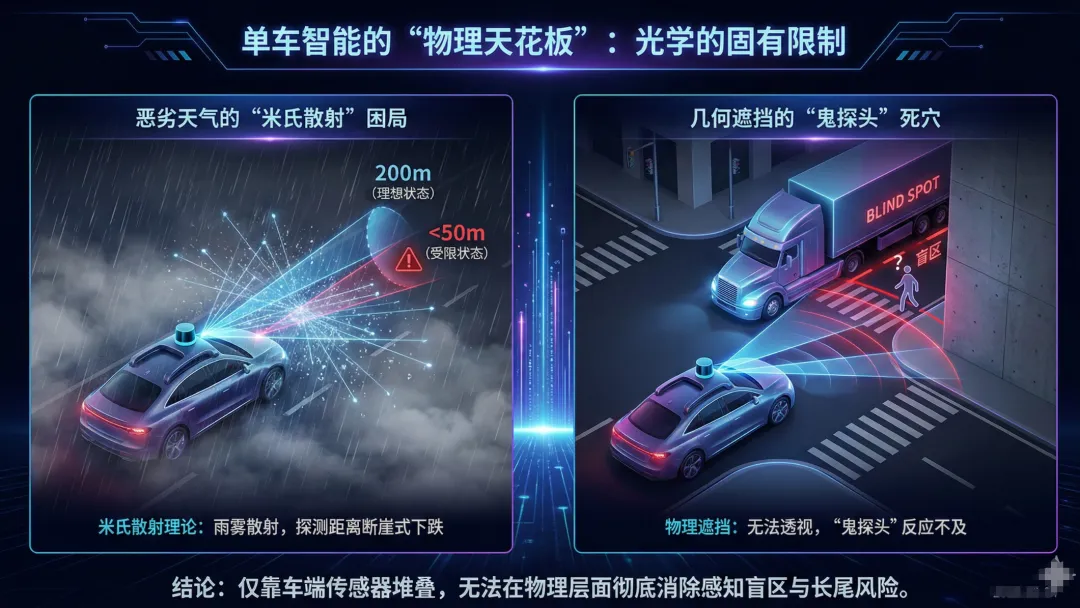
1. 恶劣天气的“米氏散射”困局
自动驾驶的基石是感知。然而,目前主流的光学传感器(LiDAR和摄像头)对介质极其敏感。根据米氏散射理论(Mie Scattering Theory),当大气中的雨滴、雾滴尺寸与探测波长接近时,会发生剧烈的散射效应。 这就解释了为什么在暴雨或浓雾下,哪怕是最昂贵的激光雷达,其探测距离也会从200米断崖式下跌至50米以内。此时,单车智能就像一个视力受损的运动员在迷雾中奔跑,风险系数几何级上升。
2. 几何遮挡的“鬼探头”死穴
比天气更可怕的是物理遮挡。在城市道路的十字路口,大型车辆遮挡视线、行人从盲区突然冲出(鬼探头),是单车智能无法逾越的“几何死角”。无论车端的算法多先进,它都无法透视混凝土墙壁或前方的大货车。依靠单车传感器,只有当行人真正出现在视野中时才能做出反应,而这往往意味着——来不及了。
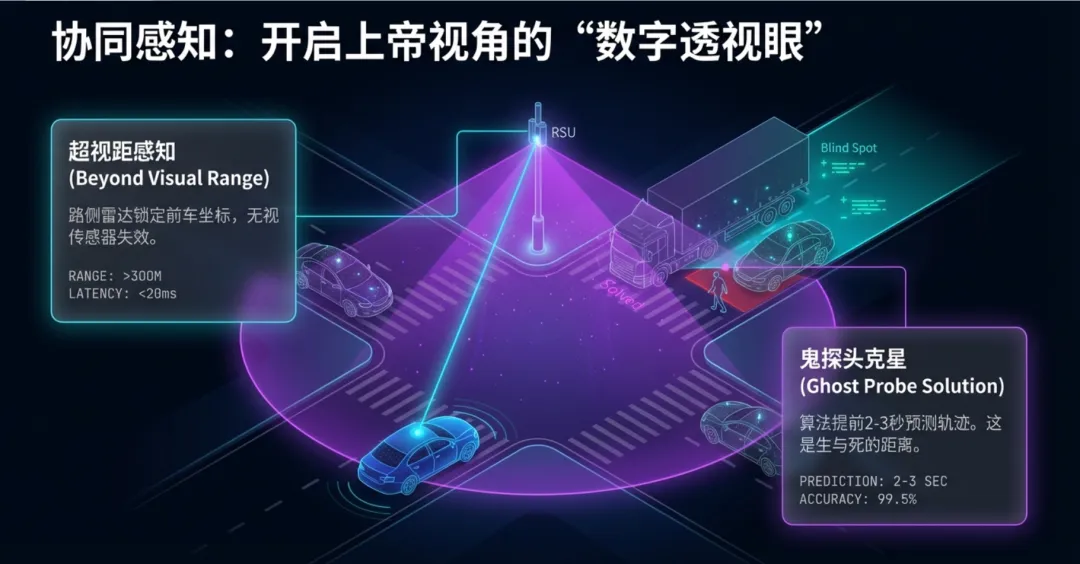
二、 协同感知:开启上帝视角的“数字透视眼”
如果说单车智能是在打造一个完美的“孤胆英雄”,那么车路云一体化就是在构建一支无懈可击的“数字化军队”。它通过物理感知的延伸与数字信号的救赎,重构了交通的安全边界。
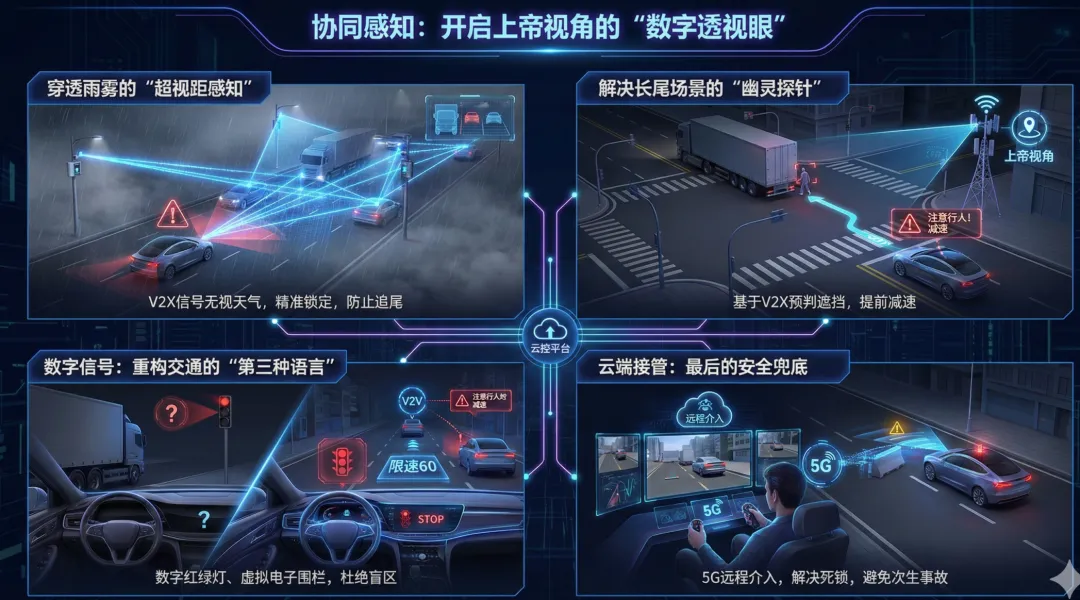
1. 穿透雨雾的“超视距感知”
车路云一体化的核心机制是协同感知(Cooperative Perception)。在最新的技术实践中(如百度的Apollo Air计划),路侧感知设备展现了强大的能力:即便在极端天气导致车端光学传感器失效时,路侧的高频V2X信号和毫米波雷达依然能精准锁定车辆位置。 通过路侧设备将感知数据广播给周边车辆,就如同给每辆车装上了一双“透视眼”。即便驾驶员或自动驾驶系统“看”不到前车,V2X提供的精确坐标也能确保车辆保持安全车距,防止连环追尾。
2. 解决长尾场景的“幽灵探针”
针对“鬼探头”场景,基于V2X的算法(如DPGP)展现了降维打击的能力。路侧设备利用其“上帝视角”,可以提前锁定遮挡物后的行人轨迹,并预测其冲出时间。 在行人尚未出现在驾驶员视野中时,系统已经通过V2X向车辆发送了“减速”指令。这种基于协同的预判,将安全防御前置了2-3秒——在交通事故中,这往往就是生与死的距离。
3. 数字信号:重构交通的“第三种语言”
如果说物理传感器解决了“看见”的问题,那么路侧广播的数字信号则解决了决策的“确定性”。在智能网联的安全逻辑里,数字信号不仅是信息的补充,更是物理冗余。
数字红绿灯(SPAT):不仅是读秒,更是“物理冗余”当自动驾驶车辆跟随大货车通过路口,或者迎着强烈夕阳行驶时,车载摄像头极易丢失对红绿灯的视觉捕捉。此时,路侧RSU通过毫秒级广播的数字相位信息,就成了车辆判断“走还是停”的唯一依据,彻底杜绝了因视觉盲区导致的闯红灯风险。
数字交通标识(IVS/RSI):全天候的“虚拟电子围栏”在团雾或暴雨中,人眼和雷达都看不清路边的施工标牌。路侧设备可以瞬间在云端生成一个“虚拟电子围栏”,在几公里外就下达“最左侧车道封闭”的数字指令。这种预知能力能够直接投射在智驾系统的决策层,形成不可逾越的安全边界。
V2V协同消息(BSM):车辆间的“隐形握手”通过基本安全消息(BSM),每辆车都在广播自己的速度、航向和制动状态。当前前车急刹时,中间车辆遮挡了雷达视线,但V2V信号会以光速传来“紧急制动预警”(EBW)。后车在还没看到刹车灯时,就已经开始了预加压制动。
4. 云端接管:最后的安全兜底
当车辆遭遇单车智能无法处理的困境(如传感器故障或复杂博弈死锁)时,云端不再是旁观者,而是远程驾驶舱(Remote Cockpit)。通过5G低时延网络,云端可以迅速介入,由远程安全员接管或引导车辆至安全区域,避免车辆像Waymo一样由于逻辑死锁而成为路障引发二次事故,这个场景称之为远程控制驾驶,主要解决脱困问题,避免次生事故。
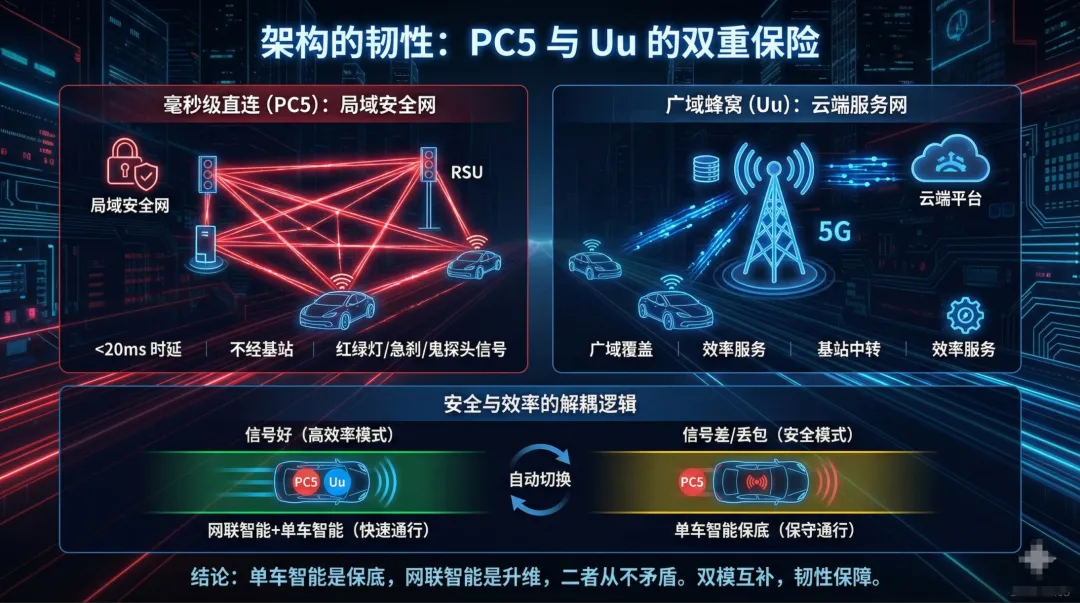
三、 架构的韧性:PC5 与 Uu 的双重保险
有人担心“断网了怎么办?”“丢包了怎么办?”这本质上是把车路云误解成了“单向依赖”,而忽略了其“双向增强”的冗余逻辑。中国方案在通信架构上做了战略深度的设计——PC5(直连通信)+ Uu(蜂窝通信)双通道融合。
- 毫秒级直连(PC5): 涉及安全的关键信号(如红绿灯、急刹预警、鬼探头)走PC5接口,不经过基站,时延控制在20ms以内。即便基站瘫痪,局域安全网依然稳固。
- 安全与效率的解耦: 我们可以把路端感知看作一个“导航系统”。有导航时(信号好、覆盖全),车辆进入“网联安全保障下的高效率模式”,快速通行;没导航或信号丢包时,系统自动切回“个体安全模式(有限感知下的单车智能)”,保守通行。
- 结论: 单车智能是保底,网联智能是升维,二者从不矛盾。
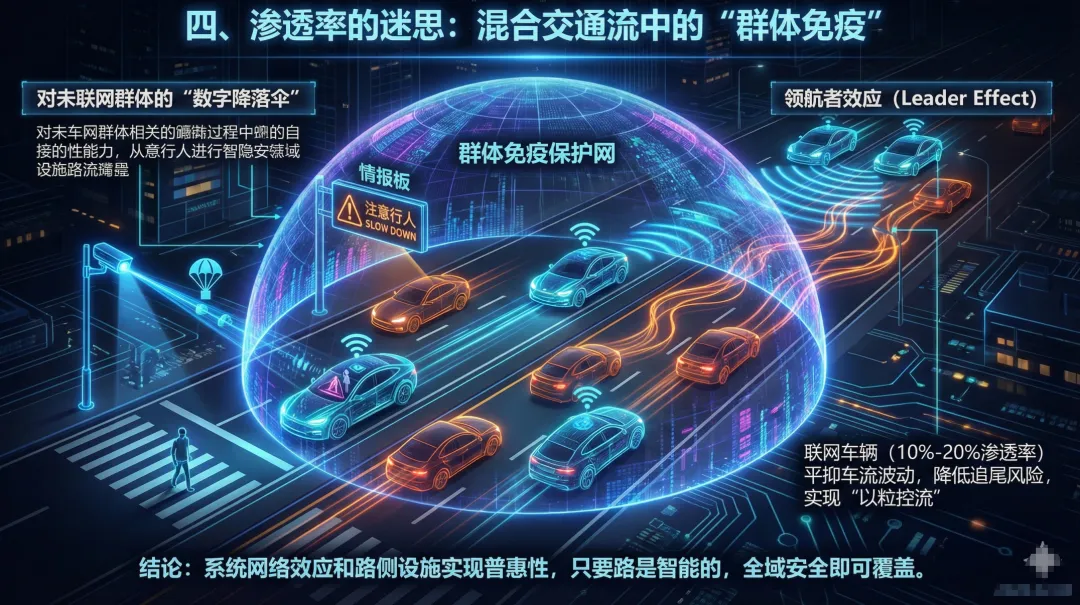
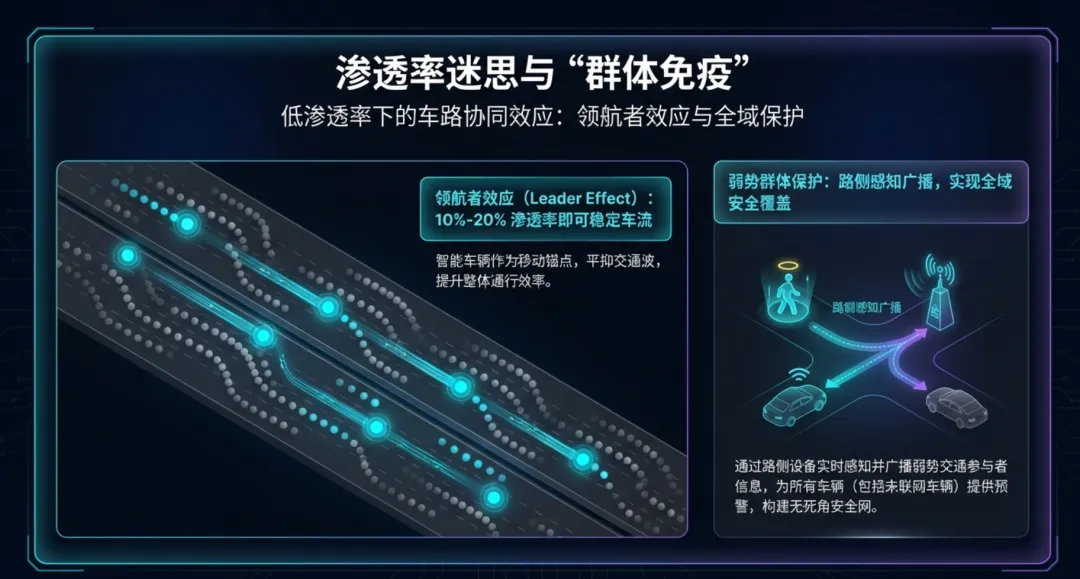
四、 渗透率的迷思:混合交通流中的“群体免疫”
一种普遍的批评是:“除非所有车都装上V2X,否则没用。” 这种观点忽略了系统的网络效应和路侧设施的普惠性。
对未联网群体的“数字降落伞”,即便行人没有联网,路侧智能摄像头识别到斑马线上的行人后,可以通过V2I广播告知所有联网车辆。这意味着,只要路是智能的,弱势群体就能被“看见”。同时,智能路侧系统可以通过情报板、发光道钉等物理方式提醒非联网的传统车,实现全域安全覆盖。
领航者效应(Leader Effect),我们做交通安全的仿真都知道,当联网车辆渗透率达到10%-20%时,交通流的安全性就会出现拐点。联网车辆像巨石一样平抑后方车流的波动,减少急刹车频率,从而降低连环追尾风险。这个就是同济大学马教授提到的“以粒控流”。
结语:安全是最大的效率
回到最初的论题:“车路云一体化只提升效率不保安全”我认为是一个伪命题。效率与安全本质上是同构的。交通效率的低下,往往源于对“不确定性”的恐惧。
在单车智能面临物理定律“天花板”的今天,车路云一体化不再是可有可无的辅助,而是通往全无人驾驶(Fully Autonomous Driving)的必经之路。它用感知的冗余对抗天气的无常,用数字信号的连接化解博弈的死锁,用基建的厚度承载生命的重量。
如果说单车智能是在打造一个完美的“超级英雄”,那么车路云一体化就是在构建一支无懈可击的“数字化调度系统”。在守护生命安全复杂交互博弈场景中,不管是安全维度还是效率维度,我们要的都不是仅仅的单车的高度智能化,而是体系化力量加持下的协同运行及系统最优。










 10个月宝宝每天需要喝多少奶粉?
10个月宝宝每天需要喝多少奶粉?
